Collective Decision-Making and Information Content in the Ant Temnothorax Rugatulus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Indonesian Grasslands with Special Focus on the Tropical Fire Ant, Solenopsis Geminata
The Community Ecology of Ants (Formicidae) in Indonesian Grasslands with Special Focus on the Tropical Fire Ant, Solenopsis geminata. By Rebecca L. Sandidge A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Environmental Science, Policy, and Management in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Neil D. Tsutsui, Chair Professor Brian Fisher Professor Rosemary Gillespie Professor Ellen Simms Fall 2018 The Community Ecology of Ants (Formicidae) in Indonesian Grasslands with Special Focus on the Tropical Fire Ant, Solenopsis geminata. © 2018 By Rebecca L. Sandidge 1 Abstract The Community Ecology of Ants (Formicidae) in Indonesian Grasslands with Special Focus on the Tropical Fire Ant, Solenopsis geminata. by Rebecca L. Sandidge Doctor of Philosophy in Environmental Science Policy and Management, Berkeley Professor Neil Tsutsui, Chair Invasive species and habitat destruction are considered to be the leading causes of biodiversity decline, signaling declining ecosystem health on a global scale. Ants (Formicidae) include some on the most widespread and impactful invasive species capable of establishing in high numbers in new habitats. The tropical grasslands of Indonesia are home to several invasive species of ants. Invasive ants are transported in shipped goods, causing many species to be of global concern. My dissertation explores ant communities in the grasslands of southeastern Indonesia. Communities are described for the first time with a special focus on the Tropical Fire Ant, Solenopsis geminata, which consumes grass seeds and can have negative ecological impacts in invaded areas. The first chapter describes grassland ant communities in both disturbed and undisturbed grasslands. -

Radiation in Socially Parasitic Formicoxenine Ants
RADIATION IN SOCIALLY PARASITIC FORMICOXENINE ANTS DISSERTATION ZUR ERLANGUNG DES DOKTORGRADES DER NATURWISSENSCHAFTEN (D R. R ER . N AT .) DER NATURWISSENSCHAFTLICHEN FAKULTÄT III – BIOLOGIE UND VORKLINISCHE MEDIZIN DER UNIVERSITÄT REGENSBURG vorgelegt von Jeanette Beibl aus Landshut 04/2007 General Introduction II Promotionsgesuch eingereicht am: 19.04.2007 Die Arbeit wurde angeleitet von: Prof. Dr. J. Heinze Prüfungsausschuss: Vorsitzender: Prof. Dr. S. Schneuwly 1. Prüfer: Prof. Dr. J. Heinze 2. Prüfer: Prof. Dr. S. Foitzik 3. Prüfer: Prof. Dr. P. Poschlod General Introduction I TABLE OF CONTENTS GENERAL INTRODUCTION 1 CHAPTER 1: Six origins of slavery in formicoxenine ants 13 Introduction 15 Material and Methods 17 Results 20 Discussion 23 CHAPTER 2: Phylogeny and phylogeography of the Mediterranean species of the parasitic ant genus Chalepoxenus and its Temnothorax hosts 27 Introduction 29 Material and Methods 31 Results 36 Discussion 43 CHAPTER 3: Phylogenetic analyses of the parasitic ant genus Myrmoxenus 46 Introduction 48 Material and Methods 50 Results 54 Discussion 59 CHAPTER 4: Cuticular profiles and mating preference in a slave-making ant 61 Introduction 63 Material and Methods 65 Results 69 Discussion 75 CHAPTER 5: Influence of the slaves on the cuticular profile of the slave-making ant Chalepoxenus muellerianus and vice versa 78 Introduction 80 Material and Methods 82 Results 86 Discussion 89 GENERAL DISCUSSION 91 SUMMARY 99 ZUSAMMENFASSUNG 101 REFERENCES 103 APPENDIX 119 DANKSAGUNG 120 General Introduction 1 GENERAL INTRODUCTION Parasitism is an extremely successful mode of life and is considered to be one of the most potent forces in evolution. As many degrees of symbiosis, a phenomenon in which two unrelated organisms coexist over a prolonged period of time while depending on each other, occur, it is not easy to unequivocally define parasitism (Cheng, 1991). -

Print This Article
Sociobiology 68(2): e5941 (June, 2021) DOI: 10.13102/sociobiology.v68i2.5941 Sociobiology An international journal on social insects Research article - Ants Caste-specific phenotypic plasticity of Asian weaver ants: Revealing the allometric and non- allometric component of female caste system of Oecophylla smaragdina (hymenoptera: Formicidae) by using geometric morphometrics KV Mahima1, PP Anand1, S Seena1, K. Shameema1, EM Manogem2, Y Shibu Vardhanan1 1 - Biochemistry & Toxicology Division, Department of Zoology, University of Calicut, Kerala, India 2 - Insect Endocrinology Laboratory, Department of Zoology, University of Calicut, Kerala, India Article History Abstract In eusocial insects, particularly in ants, caste differentiation is extremely complicated Edited by when we rely on traditional taxonomy. In most species, the worker caste does not Evandro N. Silva, UEFS, Brazil Received 29 October 2020 display any distinct morphological characters neither the caste’s central division Initial acceptance 14 March 2021 according to their morphological size variations. We used a landmark-based geometric Final acceptance 12 April 2021 morphometric approach to quantify the morphological characteristics of female caste Publication date 31 May 2021 systems (queen, major and minor worker ant) of Oecophylla smaragdina. Our findings suggested that each caste has its unique shape and size. Especially in the worker caste, Keywords apart from the size variations, we can use the shape as a prominent tool for distinguishing Asian weaver ant, Caste system, Polyphenism, Oecophylla smaragdina, between them. The O. smaragdina exhibits a triphasic allometry pattern. Studying Geometric morphometric. the allometry and non-allometry components of each caste system revealed a highly complex size and shape relationship in the female caste systems. -

AMERICAN MUSEUM NOVITATES Published by Number 255 TH Amiwcan N1gmu Historyoatutal March 12, 1927
AMERICAN MUSEUM NOVITATES Published by Number 255 TH AmiwcAN N1gMu HisToryoATutAL March 12, 1927 59.57,96(51) CHINESE ANTS COLLECTED BY PROFESSOR S. F. LIGHT AND PROFESSOR N. GIST GEE BY WILLIAM MORTON WHEELER In two collections recently received, one made by Professor S. F. Light in Southern China (Amoy and vicinity) and one by Professor N. Gist Gee in Northern China (vicinity of Peking), I find several forms not recorded in previous papers. In addition to several new forms, Professor Light has discovered the male of the very singular monotypic genus Trigonogaster Forel. DorylinM Anictus fergusoni Forel var. hodgsoni Forel.-Eight workers from Back Liang (Light). Znictus latiscapus Forel var. fumatus, new variety MALE.-Differing from the typical form in sculpture and color. The whole body, including the mandibles and antenne, opaque, the legs shining. Head black; mesonotum and dorsal and ventral surfaces of first to fourth gastric segments dark brown. Appendages, scutellum, epinotum, pleurae, petiole and tip of gaster.brownish yellow. Wings with dark brown veins and stigma (in the type much paler). A single specimen from Anioy (Light). This is probably the form seen by Bingham, who mentions a speci- men in the British Museum from Rangoon, Burma, as being darker and more punctured and as being probably only a variety. Ponerinm Odontoponera transversa F: Smith. Three workers from Back Liang (Light). Diacamma rugosum Le Guillou subsp. geometricum F. Smith.-One worker from Amoy (Light). Diacamma rugosum subsp. geometricum var. viridipurpureum Emery.-A single worker from Amoy (Light), agreeing with specimens from the Philippines, the type locality of this variety. -

Taxonomic Classification of Ants (Formicidae)
bioRxiv preprint doi: https://doi.org/10.1101/407452; this version posted September 4, 2018. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY 4.0 International license. Taxonomic Classification of Ants (Formicidae) from Images using Deep Learning Marijn J. A. Boer1 and Rutger A. Vos1;∗ 1 Endless Forms, Naturalis Biodiversity Center, Leiden, 2333 BA, Netherlands *[email protected] Abstract 1 The well-documented, species-rich, and diverse group of ants (Formicidae) are important 2 ecological bioindicators for species richness, ecosystem health, and biodiversity, but ant 3 species identification is complex and requires specific knowledge. In the past few years, 4 insect identification from images has seen increasing interest and success, with processing 5 speed improving and costs lowering. Here we propose deep learning (in the form of a 6 convolutional neural network (CNN)) to classify ants at species level using AntWeb 7 images. We used an Inception-ResNet-V2-based CNN to classify ant images, and three 8 shot types with 10,204 images for 97 species, in addition to a multi-view approach, for 9 training and testing the CNN while also testing a worker-only set and an AntWeb 10 protocol-deviant test set. Top 1 accuracy reached 62% - 81%, top 3 accuracy 80% - 92%, 11 and genus accuracy 79% - 95% on species classification for different shot type approaches. 12 The head shot type outperformed other shot type approaches. -

Recovery of Domestic Behaviors by a Parasitic Ant (Formica Subintegra) in the Absence of Its Host (Formica Subsericea)
BearWorks MSU Graduate Theses Spring 2019 Recovery of Domestic Behaviors by a Parasitic Ant (Formica Subintegra) in the Absence of Its Host (Formica Subsericea) Amber Nichole Hunter Missouri State University, [email protected] As with any intellectual project, the content and views expressed in this thesis may be considered objectionable by some readers. However, this student-scholar’s work has been judged to have academic value by the student’s thesis committee members trained in the discipline. The content and views expressed in this thesis are those of the student-scholar and are not endorsed by Missouri State University, its Graduate College, or its employees. Follow this and additional works at: https://bearworks.missouristate.edu/theses Part of the Behavior and Ethology Commons, Entomology Commons, and the Other Ecology and Evolutionary Biology Commons Recommended Citation Hunter, Amber Nichole, "Recovery of Domestic Behaviors by a Parasitic Ant (Formica Subintegra) in the Absence of Its Host (Formica Subsericea)" (2019). MSU Graduate Theses. 3376. https://bearworks.missouristate.edu/theses/3376 This article or document was made available through BearWorks, the institutional repository of Missouri State University. The work contained in it may be protected by copyright and require permission of the copyright holder for reuse or redistribution. For more information, please contact [email protected]. RECOVERY OF DOMESTIC BEHAVIORS BY A PARASITIC ANT (FORMICA SUBINTEGRA) IN THE ABSENCE OF ITS HOST (FORMICA -
"Genera Inseetorum". There Are Only Thirteen Species, but One of Them, the Indomalayan Rugosum Has Some 25 Subspecies and Varieties
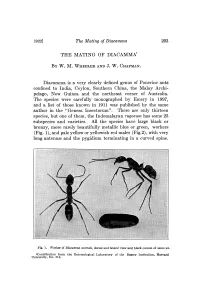
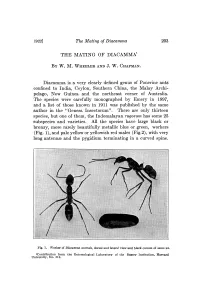
1922] The Mating of Diacamma 203 THE MATING OF DIACAMMA BY W. M. WHEELER AND J. W. CHAPMAN. Diacamma is a very clearly defined genus of Ponerine ants confined to India, Ceylon, Southern China, the Malay Archi- pelago, New Guinea and the northeast corner of Australia. The species were carefully monographed by Emery in 1897, and a list of those known in 1911 was published by the same author in the "Genera Inseetorum". There are only thirteen species, but one of them, the Indomalayan rugosum has some 25 subspecies and varieties. All the species have large black or bronzy, more rarely beautifully metallic blue or green, workers (Fig. 1), and pale yellow or yellowish red males (Fig.2), with very long antennm and the pygidium terminating in a curved spine. Fig. 1. Worker of Diacamma australe, dorsal and lateral view and black cocoon of same x4. 1Contribution from the Entomological Laboratory of the Bussey Institution, Harvard University, No. 212. 204 Psyche [October-December l'ig. 2. Male of Diacamma australe xS. The workers are very agile and graceful in their movements and both Rothney (1889) and Bingham (1903) regard them as by far the most intelligent of Oriental ants. The species of Diacamma are also of unusual interest from the fact that although several of them are common and have often been observed in the field, no one has ever been able to find in any one of them a form corresponding to the winged, fertile female, or queen of other ants. Frederick Smith (1863), nearly 60 years ago, described a worker and "female" of D. -

Hymenoptera: Formicidae: Ponerinae)
Molecular Phylogenetics and Taxonomic Revision of Ponerine Ants (Hymenoptera: Formicidae: Ponerinae) Item Type text; Electronic Dissertation Authors Schmidt, Chris Alan Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction or presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 10/10/2021 23:29:52 Link to Item http://hdl.handle.net/10150/194663 1 MOLECULAR PHYLOGENETICS AND TAXONOMIC REVISION OF PONERINE ANTS (HYMENOPTERA: FORMICIDAE: PONERINAE) by Chris A. Schmidt _____________________ A Dissertation Submitted to the Faculty of the GRADUATE INTERDISCIPLINARY PROGRAM IN INSECT SCIENCE In Partial Fulfillment of the Requirements For the Degree of DOCTOR OF PHILOSOPHY In the Graduate College THE UNIVERSITY OF ARIZONA 2009 2 2 THE UNIVERSITY OF ARIZONA GRADUATE COLLEGE As members of the Dissertation Committee, we certify that we have read the dissertation prepared by Chris A. Schmidt entitled Molecular Phylogenetics and Taxonomic Revision of Ponerine Ants (Hymenoptera: Formicidae: Ponerinae) and recommend that it be accepted as fulfilling the dissertation requirement for the Degree of Doctor of Philosophy _______________________________________________________________________ Date: 4/3/09 David Maddison _______________________________________________________________________ Date: 4/3/09 Judie Bronstein -
"Genera Inseetorum". There Are Only Thirteen Species, but One of Them, the Indomalayan Rugosum Has Some 25 Subspecies and Varieties
1922] The Mating of Diacamma 203 THE MATING OF DIACAMMA BY W. M. WHEELER AND J. W. CHAPMAN. Diacamma is a very clearly defined genus of Ponerine ants confined to India, Ceylon, Southern China, the Malay Archi- pelago, New Guinea and the northeast corner of Australia. The species were carefully monographed by Emery in 1897, and a list of those known in 1911 was published by the same author in the "Genera Inseetorum". There are only thirteen species, but one of them, the Indomalayan rugosum has some 25 subspecies and varieties. All the species have large black or bronzy, more rarely beautifully metallic blue or green, workers (Fig. 1), and pale yellow or yellowish red males (Fig.2), with very long antennm and the pygidium terminating in a curved spine. Fig. 1. Worker of Diacamma australe, dorsal and lateral view and black cocoon of same x4. 1Contribution from the Entomological Laboratory of the Bussey Institution, Harvard University, No. 212. 204 Psyche [October-December l'ig. 2. Male of Diacamma australe xS. The workers are very agile and graceful in their movements and both Rothney (1889) and Bingham (1903) regard them as by far the most intelligent of Oriental ants. The species of Diacamma are also of unusual interest from the fact that although several of them are common and have often been observed in the field, no one has ever been able to find in any one of them a form corresponding to the winged, fertile female, or queen of other ants. Frederick Smith (1863), nearly 60 years ago, described a worker and "female" of D. -

Anceps. Diacamma Rugosum Var
BARRY BOLTON’S ANT CATALOGUE, 2020 DIACAMMA aequale. Diacamma aequale Zettel, et al. 2016: 163, figs. 46-49 (w.) PHILIPPINES (Negros I.). Type-material: holotype worker, 3 paratype workers. Type-locality: holotype Philippines: Negros Oriental, Sibulan, Lake Balinsasayao-Lake Danae (Twin Lakes), 28-30.x. (C.V. Pangantihon); paratypes with same data. Type-depositories: NMPM (holotype); HSZC (paratypes). Distribution: Philippines (Negros). anceps. Diacamma rugosum var. anceps Matsumura & Uchida, 1926: 51. Type-material: syntype workers (number not stated). Type-localities: China: Hong Kong (Ris), Indonesia: Sumatra, Enggano I., Bua Bua, v.-vi.1891 (Modigliani), and Myanmar (“Birmania”): Carin (L. Fea). Type-depository: MSNG. [First available use of Diacamma rugosum subsp. geometricum var. anceps Emery, 1897b: 155 (w.) CHINA (Hong Kong), INDONESIA (Enggano I.), MYANMAR; unavailable (infrasubspecific) name.] As unavailable (infrasubspecific) name: Emery, 1900d: 666; Forel, 1900d: 320; Emery, 1911d: 66; Forel, 1912a: 49; Forel, 1912d: 100; Forel, 1912n: 52; Wheeler, W.M. 1921c: 529; Wheeler, W.M. 1921e: 110; Wheeler, W.M. 1923b: 1; Wheeler, W.M. 1924b: 242; Wheeler, W.M. 1928c: 5; Wheeler, W.M. 1929g: 58; Wheeler, W.M. 1930h: 58; Karavaiev, 1935a: 63; Teranishi, 1940: 56; Yasumatsu, 1940a: 67; Onoyama, 1980: 196. Junior synonym of rugosum: Lin & Wu, 2003: 67. Subspecies of rugosum: Chapman & Capco, 1951: 55; Bolton, 1995b: 169; Terayama, 2009: 103; Zhou & Ran, 2010: 104; Guénard & Dunn, 2012: 58. Distribution: China, Indonesia (Enggano, Java, Sebesi), Japan, Myanmar, Taiwan. andamane. Diacamma rugosum var. andamana Chapman & Capco, 1951: 55. Type-material: syntype worker(s), syntype male(s) (numbers not stated). Type-locality: India: S Andaman Is, Kyd I. -
Of Sri Lanka: a Taxonomic Research Summary and Updated Checklist
ZooKeys 967: 1–142 (2020) A peer-reviewed open-access journal doi: 10.3897/zookeys.967.54432 CHECKLIST https://zookeys.pensoft.net Launched to accelerate biodiversity research The Ants (Hymenoptera, Formicidae) of Sri Lanka: a taxonomic research summary and updated checklist Ratnayake Kaluarachchige Sriyani Dias1, Benoit Guénard2, Shahid Ali Akbar3, Evan P. Economo4, Warnakulasuriyage Sudesh Udayakantha1, Aijaz Ahmad Wachkoo5 1 Department of Zoology and Environmental Management, University of Kelaniya, Sri Lanka 2 School of Biological Sciences, The University of Hong Kong, Hong Kong SAR, China3 Central Institute of Temperate Horticulture, Srinagar, Jammu and Kashmir, 191132, India 4 Biodiversity and Biocomplexity Unit, Okinawa Institute of Science and Technology Graduate University, Onna, Okinawa, Japan 5 Department of Zoology, Government Degree College, Shopian, Jammu and Kashmir, 190006, India Corresponding author: Aijaz Ahmad Wachkoo ([email protected]) Academic editor: Marek Borowiec | Received 18 May 2020 | Accepted 16 July 2020 | Published 14 September 2020 http://zoobank.org/61FBCC3D-10F3-496E-B26E-2483F5A508CD Citation: Dias RKS, Guénard B, Akbar SA, Economo EP, Udayakantha WS, Wachkoo AA (2020) The Ants (Hymenoptera, Formicidae) of Sri Lanka: a taxonomic research summary and updated checklist. ZooKeys 967: 1–142. https://doi.org/10.3897/zookeys.967.54432 Abstract An updated checklist of the ants (Hymenoptera: Formicidae) of Sri Lanka is presented. These include representatives of eleven of the 17 known extant subfamilies with 341 valid ant species in 79 genera. Lio- ponera longitarsus Mayr, 1879 is reported as a new species country record for Sri Lanka. Notes about type localities, depositories, and relevant references to each species record are given. -
The Higher Classification of the Ant Subfamily Ponerinae (Hymenoptera: Formicidae), with a Review of Ponerine Ecology and Behavior
Zootaxa 3817 (1): 001–242 ISSN 1175-5326 (print edition) www.mapress.com/zootaxa/ Monograph ZOOTAXA Copyright © 2014 Magnolia Press ISSN 1175-5334 (online edition) http://dx.doi.org/10.11646/zootaxa.3817.1.1 http://zoobank.org/urn:lsid:zoobank.org:pub:A3C10B34-7698-4C4D-94E5-DCF70B475603 ZOOTAXA 3817 The Higher Classification of the Ant Subfamily Ponerinae (Hymenoptera: Formicidae), with a Review of Ponerine Ecology and Behavior C.A. SCHMIDT1 & S.O. SHATTUCK2 1Graduate Interdisciplinary Program in Entomology and Insect Science, Gould-Simpson 1005, University of Arizona, Tucson, AZ 85721-0077. Current address: Native Seeds/SEARCH, 3584 E. River Rd., Tucson, AZ 85718. E-mail: [email protected] 2CSIRO Ecosystem Sciences, GPO Box 1700, Canberra, ACT 2601, Australia. Current address: Research School of Biology, Australian National University, Canberra, ACT, 0200 Magnolia Press Auckland, New Zealand Accepted by J. Longino: 21 Mar. 2014; published: 18 Jun. 2014 C.A. SCHMIDT & S.O. SHATTUCK The Higher Classification of the Ant Subfamily Ponerinae (Hymenoptera: Formicidae), with a Review of Ponerine Ecology and Behavior (Zootaxa 3817) 242 pp.; 30 cm. 18 Jun. 2014 ISBN 978-1-77557-419-4 (paperback) ISBN 978-1-77557-420-0 (Online edition) FIRST PUBLISHED IN 2014 BY Magnolia Press P.O. Box 41-383 Auckland 1346 New Zealand e-mail: [email protected] http://www.mapress.com/zootaxa/ © 2014 Magnolia Press All rights reserved. No part of this publication may be reproduced, stored, transmitted or disseminated, in any form, or by any means, without prior written permission from the publisher, to whom all requests to reproduce copyright material should be directed in writing.