Cresis UAV Critical Design Review: the Meridian
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Oxygen Systems
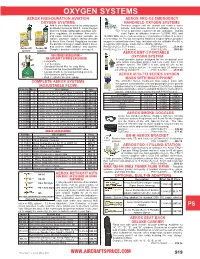
OXYGEN SYSTEMS AEROX HIGH-DURATION AVIATION AEROX PRO-O2 EMERGENCY OXYGEN SYSTEMS HANDHELD OXYGEN SYSTEMS Add to your flying comfort by using oxygen Provides oxygen until the aircraft can reach a lower at altitudes as low as 5000 ft. Aerox Oxygen altitude. And because Pro-O2 is refillable, there is no CM Systems include lightweight aluminum cyl in- need to purchase replacement O2 cartridges. During ders, regulators, all hardware, flow meter, short flights at altitudes between 12,500ft. MSL and and nasal cannulas (masks available as 14,000ft. MSL where maneuvering over mountains or turbulent weather option). Oxysaver oxygen saving cannulas is necessary, the Pro-O2 emergency handheld oxygen system provides & Aerox Flow Control Regulators increase oxygen to extend these brief legs. Included with the refillable Pro-O2 is WP the duration of oxygen supply about 4 times, a regulator with gauge, mask and a refillable cylinder. and prevent nasal irritation and dryness. Pro-O2-2 (2 Cu. Ft./1 mask)........................P/N 13-02735 .........$328.00 Aerox 2D Aerox 4M Complete brochure available on request. Pro-O2-4 (2 Cu. Ft./2 masks) ......................P/N 13-02736 .........$360.00 system system AEROX EMT-3 PORTABLE 500 SERIES REGULATOR – AN AIRCRAFT SPRUCE EXCLUSIVE! OXYGEN SYSTEM ME A small portable system designed for the occasional user • Low profile who wants something smaller and less costly than a full • 1, 2, & 4 place portable system. The EMT-3 is also ideal for use as an • Standard Aircraft filler for easy filling emergency oxygen system. The system lasts 25 minutes at • Convenient top mounted ON/OFF valve 2.5 LPM @ 25,000 FT. -
Assembly Manual
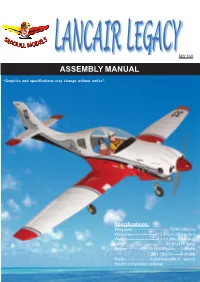
MS:160 ASSEMBLY MANUAL “Graphics and specifications may change without notice”. Specifications: Wing span ------------------------------70.9in (180cm). Wing area -----------------613.8sq.in (39.6sq dm). Weight ------------------------9.7-10.6lbs (4.4-4.8kg). Length ------------------------------58.8in (149.3cm). Engine ------------------ 0.75-0.91cu.in -----2-stroke. 1.00-1.25cu.in -----4-stroke. Radio ------------------- 6 channels with 11 servos. Electric conversion: optional LANCAIR LEGACY Instruction Manual. INTRODUCTION. Thank you for choosing the LANCAIR LEGACY ARTF by SEAGULL MODELS COMPANY LTD. The LANCAIR LEGACY was designed with the intermediate/advanced sport flyer in mind. It is a semi scale airplane which is easy to fly and quick to assemble. The airframe is conventionally built using balsa, plywood to make it stronger than the average ARTF , yet the design allows the aeroplane to be kept light. You will find that most of the work has been done for you already.The motor mount has been fitted and the hinges are pre-installed . Flying the LANCAIR LEGACY is simply a joy. This instruction manual is designed to help you build a great flying aeroplane. Please read this manual thoroughly before starting assembly of your LANCAIR LEGACY . Use the parts listing below to identify all parts. WARNING. Please be aware that this aeroplane is not a toy and if assembled or used incorrectly it is capable of causing injury to people or property. WHEN YOU FLY THIS AEROPLANE YOU ASSUME ALL RISK & RESPONSIBILITY. If you are inexperienced with basic R/C flight we strongly recommend you contact your R/C supplier and join your local R/C Model Flying Club. -
Lancair Legacy RG
Legacy PILOT’S OPERATING HANDBOOK and AIRPLANE FLIGHT MANUAL for the LEGACY Mfgr’s Serial No. ___________________________ Registration No. ___________________________ Owners will need to develop a Pilot’s Operating Handbook as part of the aircraft airworthiness process, and are encouraged to modify this document to help in that process. Legacy Legacy Published by Lancair International Inc. Redmond, Oregon 97756 Authorized Dealer Neico Aviation Inc. 2244 Airport Way Redmond, Oregon 97756 February 2008 iii Legacy Legacy PILOT’S OPERATING HANDBOOK and AIRPLANE FLIGHT MANUAL February 2008 Log of Revisions PAGES DESCRIPTION February 2008 iii Legacy Legacy INTRODUCTION This Lancair International Pilot’s Operating Handbook and Airplane Flight Manual is in the format and contains most data recommended in the GAMA (General Aviation Manufacturers Association) Handbook Specification Number 1. Use of this specification provides the pilot the same type data in the same place in all of the handbooks. For example, attention is called to Section X, SAFETY INFORMATION. We feel it is very important to have this information in a condensed and readily available location and format for the pilots immediate use when needed. This SAFETY INFORMATION should be read and studied by all opera- tors of the Lancair Legacy aircraft and will provide a periodic review of good piloting techniques for this aircraft. This manual will not replace safe flight instruction or good piloting techniques. NOTE Owner modifications to your Lancair may alter the applicability of this handbook which meets the GAMA specification #1 for pilots operating handbooks. WARNING Use only genuine Lancair approved parts obtained from authorized Lancair dealers when repairing and maintaining your Lancair Legacy. -

New Homebuilts No Renum 2013 to 2014 Xlsx
N# Registered Manufacturer Registered Model Name Catalog Name S/N 2214 JUNGSTER 1 1 130 440SS SEGA GARY E 5 5 S 94040013 482FD DAVID R DANTONIO 404 404 X69 66EM MATHERNE EWELL P 582 582 158 2428L SALTERS DANIEL L 7B-15 7B-15 001 498NS SHOWKER JAMES S A26 A26 A2610 495PA DANIEL K SAUL ADE RZ-7 ADE RZ-7 1001 967RJ WATKINS ROBERT M AEROBAT 100 AEROBAT 100 1001 101E NELSON ROGER AERONICA T AERONICA T 1 72417 MERLIN D. PEAY HOBBY-COPTER AH 1 AH 1 2001 503NS SHEKLETON NOEL AIR COMMAND 503 AIR COMMAND 503 S-1 175EC CHARLES D REICHERT AL3 AL3 TX-1033 49AX DENNY ROGER A ALASKA 18 ALASKA 18 0050 312TJ BALENTINE THOMAS J ALLIED T J ALLIED T J 023 504WM MARTIN WILLIAM S ALLIED T J ALLIED T J 022 914AG ABID FAROOQUI APOLLO AG1 APOLLO AG1 USA220713 58835 MCKINSTRY JIM H ARESTI GANADOR ARESTI GANADOR JM-4AG 805PV PEACHEY SAM ARION LIGHTNING ARION LIGHTNING 160 87HC JOHN FRANKLIN AURORA BUTTERFLY AURORA BUTTERFLY B146 342DZ DANIEL ZELAZO AUTOGYRO CALIDUS AUTOGYRO CALIDUS C00342 509PH JOSHUA HUMPHREYS AUTOGYRO CAVALON AUTOGYRO CAVALON V00139 509QB MICHAEL BURTON AUTOGYRO CAVALON AUTOGYRO CAVALON V00138 832TX JASON KNIGHT AUTOGYRO GMBH MTO SP AUTOGYRO GMBH MTO SP M01088 271SF JOHN CHEDESTER AUTOGYRO MTO SPORT AUTOGYRO MTO SPORT M01050 504RD RODNEY L DRISKELL AUTOGYRO MTO SPORT AUTOGYRO MTO SPORT M01072 508FM CRAIG MCPHERSON AUTOGYRO MTO SPORT AUTOGYRO MTO SPORT M01096 502NP ALEXANDER ROLINSKI AVENTURA II AVENTURA II AA2A0166 2378E AVIOTEC SRL AVIASTOL AVIASTOL 001 846WT NOBLE TRAVIS E AVID C AVID C 846 341RP PRANGE RICHARD L AVID C PLUS AVID C PLUS 001 -

Revised Listing of Amateur Built Aircraft Kits
REVISED LISTING OF AMATEUR-BUILT AIRCRAFT KITS Updated on: June 22, 2021 The following is a revised listing of aircraft kits that have been evaluated and found eligible in meeting the “major portion” requirement of Title 14, Code of Federal Regulations (14 CFR) Part 21, Certification Procedures for Products and Parts, specifically, § 21.191(g). • This listing is only representative of those kits where the kit manufacturer or distributor requested an evaluation by the Federal Aviation Administration (FAA) for eligibility and should not be construed as meaning the kit(s) are FAA “certified,” “certificated,” or “approved.” • There are other aircraft kits that may allow a builder to meet the “major portion” requirement of § 21.191(g), but those manufacturers or distributors have not requested an FAA evaluation. • The placement of an aircraft kit on this list is not a prerequisite for airworthiness certification. • The primary purpose of this listing is to assist FAA Inspectors/Designees and other interested individuals by eliminating the duplication of evaluations for “major portion” determination when the aircraft is presented for airworthiness certification as an “Amateur-Built Experimental.” • Kit manufacturers or distributors whose status is unknown are identified with a question (?) mark and their address has been deleted. Additional Information and Guidance • Advisory Circular (AC) 20-27G, Certification and Operation of Amateur-Built Aircraft. • FAA Order 8130.35B, Amateur-Built Aircraft National Kit Evaluation Team • Contact your local FAA Flight Standards District Office (FSDO) or Manufacturing Inspection District Office (MIDO). Those publications and other information pertaining to amateur-built experimental aircraft are available online at http://www.faa.gov/aircraft. -
Airman Transition to Experimental Or Unfamiliar Airplanes
U.S. Department Advisory of Transportation Federal Aviation Administration Circular Subject: Airmen Transition to Experimental or Date: 3/30/11 AC No: 90-109 Unfamiliar Airplanes Initiated by: AFS-800 Change: 1. PURPOSE. This advisory circular (AC) provides information and guidance to owners and pilots of experimental airplanes and to flight instructors who teach in these airplanes. This information and guidance contains recommendations for training experience for pilots of experimental airplanes in a variety of groupings based on performance and handling characteristics. This AC does not address the testing of newly built experimental airplanes. The current edition of AC 90-89, Amateur-Built Aircraft and Ultralight Flight Testing Handbook, provides information on such testing. However, if a pilot is planning on participating in a flight- test program in an unfamiliar experimental airplane, this AC should be used to develop the skills and knowledge necessary to safely accomplish the test program using AC 90-89. This AC may also be useful in planning the transition to any unfamiliar fixed-wing airplanes, including type- certificated (TC) airplanes. 2. BACKGROUND. a. Experimental Airplanes. The experimental airplane community is an important part of the civil aviation industry in the United States; some of aviation’s greatest technological achievements were developed by amateur airplane builders. The amateur builder community is foundational to General Aviation (GA) in the United States (U.S.); however, recent trends in experimental airplane accidents have indicated a need for increased effort to ensure the preparation of pilots for the challenges of these airplanes. Historically, experimental airplane flight operations represent a small component of flight hours, but a significant percentage of GA accidents. -
Chapter 1: Introduction
REVISION LIST CHAPTER 1: INTRODUCTION The following list of revisions will allow you to update the Legacy construction manual chapter listed above. Under the “Action” column, “R&R” directs you to remove and replace the pages affected by the revision. “Add” directs you to insert the pages shows and “R” to remove the pages. PAGE(S) AFFECTED REVISION # & DATE ACTION DESCRIPTION 1-1 through 1-5 0/02-15-02 None Current revision is correct 1-6 1/09-18-02 R&R Text Correction 1-7 0/02-15-02 None Current revision is correct 1-8 1/09-18-02 R&R Text Correction 1-9 1/09-18-02 R&R Text Correction 1-10 through 1-26 0/02-15-02 None Current revision is correct 1-27 1/09-18-02 R&R Text Correction 1-28 through 1-44 0/02-15-02 None Current revision is correct 1-10 2/06-30-04 R&R Text correction. 1-3 3/12-15-04 R&R New table of contents with page numbers. 1-38 4/09-30-06 R&R New guideline for rivet location in rod ends. 1-11, 1-28, 6/08/10/07 R&R Hysol/Jeffco changes Chapter 1 REV. 6/08-10-07 1/09-18-02 1-i1-1 INTRODUCTION Lancair International Inc., Represented by Neico Aviation Inc., Copyright © 2007, Redmond, OR 97756 ASSEMBLY MANUAL FOR THE LANCAIR LEGACY Chapter 1 REV. 0/02-15-02 1-1 INTRODUCTION Lancair International Inc., Represented by Neico Aviation Inc., Copyright © 2000 , Redmond, OR 97756 Chapter 1 REV. -
Travel Canopy Covers Fit Guide
Travel Canopy Covers Fit Guide PLEASE NOTE: Travel Canopy Covers will not work if you have an antenna over the cabin area (low-wing) or in between your wingspan (high-wing) TYPE 1: Low-wing, 2 Seat, TYPE 2: Low-wing, Larger 2 Seat, Side-by-Side Side-by-Side, Selected 4 Place AeroSpool WT-9 Dynamic Aerospatiale (Socata) Rallye 150 Aerostar Festival Aerospatiale (Socata) Rallye 180, 220 & 235 Arion Lightning AMD Alarus CH2000 ATEC 122 Zephyr Beech Skipper ATEC 212 Solo Cessna Corvalis ATEC 321 Faeta Diamond DA-40 Cirrus SRS Diamond DA-50 Cozy Mark III, IV Emeraude Homebuilt Czech Aircraft SportCruiser Evektor SportStar, EuroStar Diamond DA-20, Katana, Eclipse Falco Kit Plane Diamond Super Dimona & Extreme Globe Swift Dova Skylark Grob 109 Dynaero MCR-01 Grob 115 Elitar 202 Grumman AA5 Ercoupe KIS, Cruiser Esqual Koliber 150 Europa Lancair Columbia Evektor SportStar, EuroStar Lancair ES Flaeming Air FA 04 Peregrine Lancair Evolution Fly Synthesis TEXAN Lancair IV Gobosh 700S Liberty XL-2 Gobosh 800XP Mudry Cap 10 Grumman AA1 Performance Aircraft Legend Gryf P-27 Skyster Piper Tomahawk Ikarus Breezer Robin HR200, 2160 Indus Aviation Sky Scooter, T211 Scottish Aviation Bulldog Thorpedo Siai Marchetti SF260 Interplane Mystique Staudacher S-600 Kappa KP-5 Stewart S-51 Lancair 235 Sukhoi SU-26 Lancair 320, 360 Sukhoi SU-29 Lancair Legacy 2000 Swearingen SX300 Mudry Cap 232 Team Tango 2 MySky MS-1 Tecnam Sierra Pulsar TL Sting Sport Quasar Lite Van's RV-10 Questair Venture & Spirit Varga Kachina Rans S-19 Venterra Wheeler Express Rutan Long EZ -

Lancair Legacy 2000: Covers, Plugs, Sun Shades & More
18850 Adams Ct Phone: 408/738-3959 Morgan Hill, CA 95037 Toll Free (U.S.): 800/777-6405 www.AircraftCovers.com Fax: 408/738-2729 Email: [email protected] manufacturer of the finest custom-made aircraft covers Tech Sheet: Lancair Legacy 2000 (lancair-L2K.pdf) Lancair Legacy Canopy Cover Lancair Legacy Canopy Cover Section 1: Canopy/Cockpit/Fuselage Covers Canopy Covers help reduce damage to your airplane's upholstery and avionics caused by excessive heat, and they can eliminate problems caused by leaking door and window seals. They keep the windshield and window surfaces clean and help prevent vandalism and theft. The Lancair Legacy 2000 Canopy Cover is custom-designed for each model, as well as your aircraft's specific antenna and temperature probe placements, if applicable. The Canopy Cover is designed to enclose the windshield, side windows and canopy roof. The Canopy Cover attaches using adjustable "belly straps", which run under the belly and connect to the other side of the cover with a quick-release plastic buckle. When requested, it is also sometimes possible to design Canopy covers that can attach to the aircraft fuselage using pop-riveted snap-heads at the rear and snap-head screws on the engine cowl. This cover type is made from Silver Acrylic Sunbrella canvas and is 100% lined with a soft and smooth microfiber. Bruce's Custom Covers developed this material combination especially for aircraft protection. The outer material is medium weight and treated for water resistance, UV resistance and anti-static buildup. The inner lining is a very soft and smooth microfiber to prevent scratching. -

Advisory Circular 90-109A
U.S. Department Advisory of Transportation Federal Aviation Administration Circular Subject: Transition to Unfamiliar Aircraft Date: 6/29/15 AC No: 90-109A Initiated by: AFS-800 Change: 1. PURPOSE. This advisory circular (AC) is intended to help plan the transition to any unfamiliar fixed-wing airplanes, including type-certificated (TC) and/or experimental airplanes. It provides information and guidance to owners and pilots of experimental, simple, complex, high-performance, and/or unfamiliar airplanes. It also provides information to flight instructors who teach in these airplanes. This information and guidance contains recommendations for training experience for pilots of experimental airplanes in a variety of groupings based on performance and handling characteristics. This AC does not address the testing of newly built experimental airplanes. The current edition of AC 90-89, Amateur-Built Aircraft and Ultralight Flight Testing Handbook, provides information on such testing. However, if a pilot is planning to participate in a flight test program in an unfamiliar and/or experimental airplane, this AC should be used to develop the skills and knowledge necessary to safely accomplish the test program utilizing the guidance found in AC 90-89. 2. CANCELLATION. AC 90-109, Airmen Transition to Experimental or Unfamiliar Airplanes, dated March 30, 2011, is canceled. 3. BACKGROUND. a. Transitioning between Aircraft. The Federal Aviation Administration (FAA) has recognized a need to devote resources to preventing accidents occurring because of inadequate training when transitioning between aircraft types. Specifically, accidents resulting from loss of aircraft control or situational awareness frequently result from pilot unpreparedness for challenges presented by the aircraft. -

Legacy Legacy
Lancair upgrade kits - model-specific tearsheet templates: FRONT Performance AIRCRAFT KIT for Legacy Legacy. Heart of a Sport Plane. Soul of a Rocket. Specifications Length..............................................................................................22 ft Wingspan ....................................................................................25.5 ft Wing Area ............................................................................82.5 sq. ft Aspect Ratio ..............................................................................7.95 : 1 “Reno Racing” Carbon/Carbon Legacy Kit Empty Weight ........................................................................1500 lbs Climb at a rate of 2500 fpm to 10,000 feet, level off, then swallow up a 1100 mile route Gross Weight..........................................................................2200 lbs at 276 mph on a single tank of gas. You’ll want to pinch yourself. But you are not dream- Std. Fuel Capacity ......................................................................65 gal Useful Load ..............................................................................700 lbs ing. No, you are flying, first class, in the sleek Lancair Legacy—a combination of speed, Baggage Capacity......................................................................90 lbs control, comfort and economy that translates into unparalleled performance and pure Trailering Width..........................................................................120 in flying fun. And that’s in -

Homebuilt Aircraft • Pole D Irectory 2016 To
2016 BUYEr’S GUIDE EXPANDED EDITION KITPLANES DECEMBER Flying a 2015 Taildragger ® 2016 Buyer’s Guide Homebuilt Aircraft • Pole D IRECTORY 2016 to Pole Over 1000 Kits & Plans Listed! • Vortex Generators • Trim and Flaps • Column Buckling • Taildragger Transition • Fuel Injection • Mold Making BELVOIR ENGINH E T EORY DECEMBER 2015 Fuel Injection In the Shop PUBLICATIONS FU EL SYSTEM DESIGN • Wiring Flaps & Trim If It Ain’t Broke… • Mold Making VORTEX GENERATORS Improve Your Cooling www.kitplanes.com December 2015 | Volume 32, Number 12 Annual Buyer’s Guide 17 2016 HOMEBUILT AIRCRAFT DIRECTORY: • Kit and plansbuilt aircraft listings. Compiled by Omar Filipovic. • Different strokes for different folks. By Paul Dye. • What makes a kit complete? By Paul Dye. • Shopping for a second-hand project. By Omar Filipovic. • Buying your first homebuilt aircraft. By Louise Hose. Builder Spotlight 6 LEARNING HOW TO DRAG YOUR TaIL: Making the 6 transition from trigear to tailwheels. By LeRoy Cook. 12 LIGHT AIRCRAFT FUEL SYSTEM DESIGN: Part 1—If it’s not broken, don’t fix it! By Ken Krueger. 52 POLE TO POLE! Around the world over both poles (part 2). By Bill Harrelson. 60 VORTEX GENERATORS FOR COOLING: A simple fix reduced CHTs in a Velocity by 55 degrees. By David G. Ullman. 66 ENGINE ThEORY: Fuel injection—putting pressure into fuel delivery. By Tom Wilson. 97 aSK THE DAR: RV-7A converted to RV-7, importing a Canadian ultralight to the U.S. and registering as an LSA. By Mel Asberry. Shop Talk 72 AIRCRAFT WIRING: Electrical trim and flaps for Experimental aircraft.