On Phylogenetic Trees – a Geometer's View ∗
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lecture 3 1 Geometry of Linear Programs
ORIE 6300 Mathematical Programming I September 2, 2014 Lecture 3 Lecturer: David P. Williamson Scribe: Divya Singhvi Last time we discussed how to take dual of an LP in two different ways. Today we will talk about the geometry of linear programs. 1 Geometry of Linear Programs First we need some definitions. Definition 1 A set S ⊆ <n is convex if 8x; y 2 S, λx + (1 − λ)y 2 S, 8λ 2 [0; 1]. Figure 1: Examples of convex and non convex sets Given a set of inequalities we define the feasible region as P = fx 2 <n : Ax ≤ bg. We say that P is a polyhedron. Which points on this figure can have the optimal value? Our intuition from last time is that Figure 2: Example of a polyhedron. \Circled" corners are feasible and \squared" are non feasible optimal solutions to linear programming problems occur at \corners" of the feasible region. What we'd like to do now is to consider formal definitions of the \corners" of the feasible region. 3-1 One idea is that a point in the polyhedron is a corner if there is some objective function that is minimized there uniquely. Definition 2 x 2 P is a vertex of P if 9c 2 <n with cT x < cT y; 8y 6= x; y 2 P . Another idea is that a point x 2 P is a corner if there are no small perturbations of x that are in P . Definition 3 Let P be a convex set in <n. Then x 2 P is an extreme point of P if x cannot be written as λy + (1 − λ)z for y; z 2 P , y; z 6= x, 0 ≤ λ ≤ 1. -

Lesson 3: Rectangles Inscribed in Circles
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 3 M5 GEOMETRY Lesson 3: Rectangles Inscribed in Circles Student Outcomes . Inscribe a rectangle in a circle. Understand the symmetries of inscribed rectangles across a diameter. Lesson Notes Have students use a compass and straightedge to locate the center of the circle provided. If necessary, remind students of their work in Module 1 on constructing a perpendicular to a segment and of their work in Lesson 1 in this module on Thales’ theorem. Standards addressed with this lesson are G-C.A.2 and G-C.A.3. Students should be made aware that figures are not drawn to scale. Classwork Scaffolding: Opening Exercise (9 minutes) Display steps to construct a perpendicular line at a point. Students follow the steps provided and use a compass and straightedge to find the center of a circle. This exercise reminds students about constructions previously . Draw a segment through the studied that are needed in this lesson and later in this module. point, and, using a compass, mark a point equidistant on Opening Exercise each side of the point. Using only a compass and straightedge, find the location of the center of the circle below. Label the endpoints of the Follow the steps provided. segment 퐴 and 퐵. Draw chord 푨푩̅̅̅̅. Draw circle 퐴 with center 퐴 . Construct a chord perpendicular to 푨푩̅̅̅̅ at and radius ̅퐴퐵̅̅̅. endpoint 푩. Draw circle 퐵 with center 퐵 . Mark the point of intersection of the perpendicular chord and the circle as point and radius ̅퐵퐴̅̅̅. 푪. Label the points of intersection . -

The Geometry of Diagonal Groups
The geometry of diagonal groups R. A. Baileya, Peter J. Camerona, Cheryl E. Praegerb, Csaba Schneiderc aUniversity of St Andrews, St Andrews, UK bUniversity of Western Australia, Perth, Australia cUniversidade Federal de Minas Gerais, Belo Horizonte, Brazil Abstract Diagonal groups are one of the classes of finite primitive permutation groups occurring in the conclusion of the O'Nan{Scott theorem. Several of the other classes have been described as the automorphism groups of geometric or combi- natorial structures such as affine spaces or Cartesian decompositions, but such structures for diagonal groups have not been studied in general. The main purpose of this paper is to describe and characterise such struct- ures, which we call diagonal semilattices. Unlike the diagonal groups in the O'Nan{Scott theorem, which are defined over finite characteristically simple groups, our construction works over arbitrary groups, finite or infinite. A diagonal semilattice depends on a dimension m and a group T . For m = 2, it is a Latin square, the Cayley table of T , though in fact any Latin square satisfies our combinatorial axioms. However, for m > 3, the group T emerges naturally and uniquely from the axioms. (The situation somewhat resembles projective geometry, where projective planes exist in great profusion but higher- dimensional structures are coordinatised by an algebraic object, a division ring.) A diagonal semilattice is contained in the partition lattice on a set Ω, and we provide an introduction to the calculus of partitions. Many of the concepts and constructions come from experimental design in statistics. We also determine when a diagonal group can be primitive, or quasiprimitive (these conditions turn out to be equivalent for diagonal groups). -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

Simple Polygons Scribe: Michael Goldwasser
CS268: Geometric Algorithms Handout #5 Design and Analysis Original Handout #15 Stanford University Tuesday, 25 February 1992 Original Lecture #6: 28 January 1991 Topics: Triangulating Simple Polygons Scribe: Michael Goldwasser Algorithms for triangulating polygons are important tools throughout computa- tional geometry. Many problems involving polygons are simplified by partitioning the complex polygon into triangles, and then working with the individual triangles. The applications of such algorithms are well documented in papers involving visibility, motion planning, and computer graphics. The following notes give an introduction to triangulations and many related definitions and basic lemmas. Most of the definitions are based on a simple polygon, P, containing n edges, and hence n vertices. However, many of the definitions and results can be extended to a general arrangement of n line segments. 1 Diagonals Definition 1. Given a simple polygon, P, a diagonal is a line segment between two non-adjacent vertices that lies entirely within the interior of the polygon. Lemma 2. Every simple polygon with jPj > 3 contains a diagonal. Proof: Consider some vertex v. If v has a diagonal, it’s party time. If not then the only vertices visible from v are its neighbors. Therefore v must see some single edge beyond its neighbors that entirely spans the sector of visibility, and therefore v must be a convex vertex. Now consider the two neighbors of v. Since jPj > 3, these cannot be neighbors of each other, however they must be visible from each other because of the above situation, and thus the segment connecting them is indeed a diagonal. -

Digital Geometry Processing Mesh Basics
Digital Geometry Processing Basics Mesh Basics: Definitions, Topology & Data Structures 1 © Alla Sheffer Standard Graph Definitions G = <V,E> V = vertices = {A,B,C,D,E,F,G,H,I,J,K,L} E = edges = {(A,B),(B,C),(C,D),(D,E),(E,F),(F,G), (G,H),(H,A),(A,J),(A,G),(B,J),(K,F), (C,L),(C,I),(D,I),(D,F),(F,I),(G,K), (J,L),(J,K),(K,L),(L,I)} Vertex degree (valence) = number of edges incident on vertex deg(J) = 4, deg(H) = 2 k-regular graph = graph whose vertices all have degree k Face: cycle of vertices/edges which cannot be shortened F = faces = {(A,H,G),(A,J,K,G),(B,A,J),(B,C,L,J),(C,I,L),(C,D,I), (D,E,F),(D,I,F),(L,I,F,K),(L,J,K),(K,F,G)} © Alla Sheffer Page 1 Digital Geometry Processing Basics Connectivity Graph is connected if there is a path of edges connecting every two vertices Graph is k-connected if between every two vertices there are k edge-disjoint paths Graph G’=<V’,E’> is a subgraph of graph G=<V,E> if V’ is a subset of V and E’ is the subset of E incident on V’ Connected component of a graph: maximal connected subgraph Subset V’ of V is an independent set in G if the subgraph it induces does not contain any edges of E © Alla Sheffer Graph Embedding Graph is embedded in Rd if each vertex is assigned a position in Rd Embedding in R2 Embedding in R3 © Alla Sheffer Page 2 Digital Geometry Processing Basics Planar Graphs Planar Graph Plane Graph Planar graph: graph whose vertices and edges can Straight Line Plane Graph be embedded in R2 such that its edges do not intersect Every planar graph can be drawn as a straight-line plane graph © -
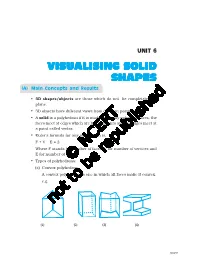
Unit 6 Visualising Solid Shapes(Final)
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Geometry Course Outline
GEOMETRY COURSE OUTLINE Content Area Formative Assessment # of Lessons Days G0 INTRO AND CONSTRUCTION 12 G-CO Congruence 12, 13 G1 BASIC DEFINITIONS AND RIGID MOTION Representing and 20 G-CO Congruence 1, 2, 3, 4, 5, 6, 7, 8 Combining Transformations Analyzing Congruency Proofs G2 GEOMETRIC RELATIONSHIPS AND PROPERTIES Evaluating Statements 15 G-CO Congruence 9, 10, 11 About Length and Area G-C Circles 3 Inscribing and Circumscribing Right Triangles G3 SIMILARITY Geometry Problems: 20 G-SRT Similarity, Right Triangles, and Trigonometry 1, 2, 3, Circles and Triangles 4, 5 Proofs of the Pythagorean Theorem M1 GEOMETRIC MODELING 1 Solving Geometry 7 G-MG Modeling with Geometry 1, 2, 3 Problems: Floodlights G4 COORDINATE GEOMETRY Finding Equations of 15 G-GPE Expressing Geometric Properties with Equations 4, 5, Parallel and 6, 7 Perpendicular Lines G5 CIRCLES AND CONICS Equations of Circles 1 15 G-C Circles 1, 2, 5 Equations of Circles 2 G-GPE Expressing Geometric Properties with Equations 1, 2 Sectors of Circles G6 GEOMETRIC MEASUREMENTS AND DIMENSIONS Evaluating Statements 15 G-GMD 1, 3, 4 About Enlargements (2D & 3D) 2D Representations of 3D Objects G7 TRIONOMETRIC RATIOS Calculating Volumes of 15 G-SRT Similarity, Right Triangles, and Trigonometry 6, 7, 8 Compound Objects M2 GEOMETRIC MODELING 2 Modeling: Rolling Cups 10 G-MG Modeling with Geometry 1, 2, 3 TOTAL: 144 HIGH SCHOOL OVERVIEW Algebra 1 Geometry Algebra 2 A0 Introduction G0 Introduction and A0 Introduction Construction A1 Modeling With Functions G1 Basic Definitions and Rigid -
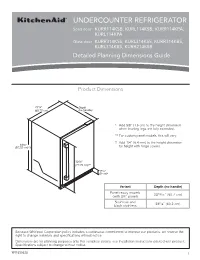
Dimension Guide
UNDERCOUNTER REFRIGERATOR Solid door KURR114KSB, KURL114KSB, KURR114KPA, KURL114KPA Glass door KURR314KSS, KURL314KSS, KURR314KBS, KURL314KBS, KURR214KSB Detailed Planning Dimensions Guide Product Dimensions 237/8” Depth (60.72 cm) (no handle) * Add 5/8” (1.6 cm) to the height dimension when leveling legs are fully extended. ** For custom panel models, this will vary. † Add 1/4” (6.4 mm) to the height dimension 343/8” (87.32 cm)*† for height with hinge covers. 305/8” (77.75 cm)** 39/16” (9 cm)* Variant Depth (no handle) Panel ready models 2313/16” (60.7 cm) (with 3/4” panel) Stainless and 235/8” (60.2 cm) black stainless Because Whirlpool Corporation policy includes a continuous commitment to improve our products, we reserve the right to change materials and specifications without notice. Dimensions are for planning purposes only. For complete details, see Installation Instructions packed with product. Specifications subject to change without notice. W11530525 1 Panel ready models Stainless and black Dimension Description (with 3/4” panel) stainless models A Width of door 233/4” (60.3 cm) 233/4” (60.3 cm) B Width of the grille 2313/16” (60.5 cm) 2313/16” (60.5 cm) C Height to top of handle ** 311/8” (78.85 cm) Width from side of refrigerator to 1 D handle – door open 90° ** 2 /3” (5.95 cm) E Depth without door 2111/16” (55.1 cm) 2111/16” (55.1 cm) F Depth with door 2313/16” (60.7 cm) 235/8” (60.2 cm) 7 G Depth with handle ** 26 /16” (67.15 cm) H Depth with door open 90° 4715/16” (121.8 cm) 4715/16” (121.8 cm) **For custom panel models, this will vary. -

Spectral Dimensions and Dimension Spectra of Quantum Spacetimes
PHYSICAL REVIEW D 102, 086003 (2020) Spectral dimensions and dimension spectra of quantum spacetimes † Michał Eckstein 1,2,* and Tomasz Trześniewski 3,2, 1Institute of Theoretical Physics and Astrophysics, National Quantum Information Centre, Faculty of Mathematics, Physics and Informatics, University of Gdańsk, ulica Wita Stwosza 57, 80-308 Gdańsk, Poland 2Copernicus Center for Interdisciplinary Studies, ulica Szczepańska 1/5, 31-011 Kraków, Poland 3Institute of Theoretical Physics, Jagiellonian University, ulica S. Łojasiewicza 11, 30-348 Kraków, Poland (Received 11 June 2020; accepted 3 September 2020; published 5 October 2020) Different approaches to quantum gravity generally predict that the dimension of spacetime at the fundamental level is not 4. The principal tool to measure how the dimension changes between the IR and UV scales of the theory is the spectral dimension. On the other hand, the noncommutative-geometric perspective suggests that quantum spacetimes ought to be characterized by a discrete complex set—the dimension spectrum. We show that these two notions complement each other and the dimension spectrum is very useful in unraveling the UV behavior of the spectral dimension. We perform an extended analysis highlighting the trouble spots and illustrate the general results with two concrete examples: the quantum sphere and the κ-Minkowski spacetime, for a few different Laplacians. In particular, we find that the spectral dimensions of the former exhibit log-periodic oscillations, the amplitude of which decays rapidly as the deformation parameter tends to the classical value. In contrast, no such oscillations occur for either of the three considered Laplacians on the κ-Minkowski spacetime. DOI: 10.1103/PhysRevD.102.086003 I. -

Curriculum Burst 31: Coloring a Pentagon by Dr
Curriculum Burst 31: Coloring a Pentagon By Dr. James Tanton, MAA Mathematician in Residence Each vertex of a convex pentagon ABCDE is to be assigned a color. There are 6 colors to choose from, and the ends of each diagonal must have different colors. How many different colorings are possible? SOURCE: This is question # 22 from the 2010 MAA AMC 10a Competition. QUICK STATS: MAA AMC GRADE LEVEL This question is appropriate for the 10th grade level. MATHEMATICAL TOPICS Counting: Permutations and Combinations COMMON CORE STATE STANDARDS S-CP.9: Use permutations and combinations to compute probabilities of compound events and solve problems. MATHEMATICAL PRACTICE STANDARDS MP1 Make sense of problems and persevere in solving them. MP2 Reason abstractly and quantitatively. MP3 Construct viable arguments and critique the reasoning of others. MP7 Look for and make use of structure. PROBLEM SOLVING STRATEGY ESSAY 7: PERSEVERANCE IS KEY 1 THE PROBLEM-SOLVING PROCESS: Three consecutive vertices the same color is not allowed. As always … (It gives a bad diagonal!) How about two pairs of neighboring vertices, one pair one color, the other pair a STEP 1: Read the question, have an second color? The single remaining vertex would have to emotional reaction to it, take a deep be a third color. Call this SCHEME III. breath, and then reread the question. This question seems complicated! We have five points A , B , C , D and E making a (convex) pentagon. A little thought shows these are all the options. (But note, with rotations, there are 5 versions of scheme II and 5 versions of scheme III.) Now we need to count the number Each vertex is to be colored one of six colors, but in a way of possible colorings for each scheme. -

Combinatorial Analysis of Diagonal, Box, and Greater-Than Polynomials As Packing Functions
Appl. Math. Inf. Sci. 9, No. 6, 2757-2766 (2015) 2757 Applied Mathematics & Information Sciences An International Journal http://dx.doi.org/10.12785/amis/090601 Combinatorial Analysis of Diagonal, Box, and Greater-Than Polynomials as Packing Functions 1,2, 3 2 4 Jose Torres-Jimenez ∗, Nelson Rangel-Valdez , Raghu N. Kacker and James F. Lawrence 1 CINVESTAV-Tamaulipas, Information Technology Laboratory, Km. 5.5 Carretera Victoria-Soto La Marina, 87130 Victoria Tamps., Mexico 2 National Institute of Standards and Technology, Gaithersburg, MD 20899, USA 3 Universidad Polit´ecnica de Victoria, Av. Nuevas Tecnolog´ıas 5902, Km. 5.5 Carretera Cd. Victoria-Soto la Marina, 87130, Cd. Victoria Tamps., M´exico 4 George Mason University, Fairfax, VA 22030, USA Received: 2 Feb. 2015, Revised: 2 Apr. 2015, Accepted: 3 Apr. 2015 Published online: 1 Nov. 2015 Abstract: A packing function is a bijection between a subset V Nm and N, where N denotes the set of non negative integers N. Packing functions have several applications, e.g. in partitioning schemes⊆ and in text compression. Two categories of packing functions are Diagonal Polynomials and Box Polynomials. The bijections for diagonal ad box polynomials have mostly been studied for small values of m. In addition to presenting bijections for box and diagonal polynomials for any value of m, we present a bijection using what we call Greater-Than Polynomial between restricted m dimensional vectors over Nm and N. We give details of two interesting applications of packing functions: (a) the application of greater-than− polynomials for the manipulation of Covering Arrays that are used in combinatorial interaction testing; and (b) the relationship between grater-than and diagonal polynomials with a special case of Diophantine equations.