Establishment of an Ideal World Geodetic System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Global Positioning System the Global Positioning System
The Global Positioning System The Global Positioning System 1. System Overview 2. Biases and Errors 3. Signal Structure and Observables 4. Absolute v. Relative Positioning 5. GPS Field Procedures 6. Ellipsoids, Datums and Coordinate Systems 7. Mission Planning I. System Overview ! GPS is a passive navigation and positioning system available worldwide 24 hours a day in all weather conditions developed and maintained by the Department of Defense ! The Global Positioning System consists of three segments: ! Space Segment ! Control Segment ! User Segment Space Segment Space Segment ! The current GPS constellation consists of 29 Block II/IIA/IIR/IIR-M satellites. The first Block II satellite was launched in February 1989. Control Segment User Segment How it Works II. Biases and Errors Biases GPS Error Sources • Satellite Dependent ? – Orbit representation ? Satellite Orbit Error Satellite Clock Error including 12 biases ? 9 3 Selective Availability 6 – Satellite clock model biases Ionospheric refraction • Station Dependent L2 L1 – Receiver clock biases – Station Coordinates Tropospheric Delay • Observation Multi- pathing Dependent – Ionospheric delay 12 9 3 – Tropospheric delay Receiver Clock Error 6 1000 – Carrier phase ambiguity Satellite Biases ! The satellite is not where the GPS broadcast message says it is. ! The satellite clocks are not perfectly synchronized with GPS time. Station Biases ! Receiver clock time differs from satellite clock time. ! Uncertainties in the coordinates of the station. ! Time transfer and orbital tracking. Observation Dependent Biases ! Those associated with signal propagation Errors ! Residual Biases ! Cycle Slips ! Multipath ! Antenna Phase Center Movement ! Random Observation Error Errors ! In addition to biases factors effecting position and/or time determined by GPS is dependant upon: ! The geometric strength of the satellite configuration being observed (DOP). -

Part V: the Global Positioning System ______
PART V: THE GLOBAL POSITIONING SYSTEM ______________________________________________________________________________ 5.1 Background The Global Positioning System (GPS) is a satellite based, passive, three dimensional navigational system operated and maintained by the Department of Defense (DOD) having the primary purpose of supporting tactical and strategic military operations. Like many systems initially designed for military purposes, GPS has been found to be an indispensable tool for many civilian applications, not the least of which are surveying and mapping uses. There are currently three general modes that GPS users have adopted: absolute, differential and relative. Absolute GPS can best be described by a single user occupying a single point with a single receiver. Typically a lower grade receiver using only the coarse acquisition code generated by the satellites is used and errors can approach the 100m range. While absolute GPS will not support typical MDOT survey requirements it may be very useful in reconnaissance work. Differential GPS or DGPS employs a base receiver transmitting differential corrections to a roving receiver. It, too, only makes use of the coarse acquisition code. Accuracies are typically in the sub- meter range. DGPS may be of use in certain mapping applications such as topographic or hydrographic surveys. DGPS should not be confused with Real Time Kinematic or RTK GPS surveying. Relative GPS surveying employs multiple receivers simultaneously observing multiple points and makes use of carrier phase measurements. Relative positioning is less concerned with the absolute positions of the occupied points than with the relative vector (dX, dY, dZ) between them. 5.2 GPS Segments The Global Positioning System is made of three segments: the Space Segment, the Control Segment and the User Segment. -

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

The Evolution of Earth Gravitational Models Used in Astrodynamics
JEROME R. VETTER THE EVOLUTION OF EARTH GRAVITATIONAL MODELS USED IN ASTRODYNAMICS Earth gravitational models derived from the earliest ground-based tracking systems used for Sputnik and the Transit Navy Navigation Satellite System have evolved to models that use data from the Joint United States-French Ocean Topography Experiment Satellite (Topex/Poseidon) and the Global Positioning System of satellites. This article summarizes the history of the tracking and instrumentation systems used, discusses the limitations and constraints of these systems, and reviews past and current techniques for estimating gravity and processing large batches of diverse data types. Current models continue to be improved; the latest model improvements and plans for future systems are discussed. Contemporary gravitational models used within the astrodynamics community are described, and their performance is compared numerically. The use of these models for solid Earth geophysics, space geophysics, oceanography, geology, and related Earth science disciplines becomes particularly attractive as the statistical confidence of the models improves and as the models are validated over certain spatial resolutions of the geodetic spectrum. INTRODUCTION Before the development of satellite technology, the Earth orbit. Of these, five were still orbiting the Earth techniques used to observe the Earth's gravitational field when the satellites of the Transit Navy Navigational Sat were restricted to terrestrial gravimetry. Measurements of ellite System (NNSS) were launched starting in 1960. The gravity were adequate only over sparse areas of the Sputniks were all launched into near-critical orbit incli world. Moreover, because gravity profiles over the nations of about 65°. (The critical inclination is defined oceans were inadequate, the gravity field could not be as that inclination, 1= 63 °26', where gravitational pertur meaningfully estimated. -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z). -

Terms for Coordinates Azimuth Angle Measured from North Clockwise
Terms for Coordinates Azimuth Angle measured from north clockwise. North is 0 degrees, east is 90 degrees etc. Three common forms of azimuth exist: true azimuth, magnetic azimuth, and grid azimuth. Angular Coordinates Latitude, Longitude, and Height can specify a location. This is called an angular frame. To obtain angular coordinates in a spherical earth system, only the radius is needed. This is needed only for the height. For an ellipsoidal earth the parameters of the ellipsoid must be specified to convert height and latitude. (To obtain geographic, or mean sea level, height the geoid is needed. Cartesian Coordinates Standard x-y-z coordinates. Three axes perpendicular to each other meet at the origin, or center of the coordinate system. The coordinates of a point are the projection of the location on these axes. Circle, Great A great circle is a circle on the earth whose center is the center of the earth. Alternately, it is the intersection of a plane and a sphere when the center of the sphere is on the plane. Shortest distance between two points on the earth in spherical model is a great circle. Meridians are great circles. Circle, Small A small circle is a circle on the earth whose center is not the center of the earth. Alternately, it is the intersection of a plane and a sphere when the center of the sphere is not on the plane. Parallels of latitude are small circles. Coordinate Frame In general this refers to a Cartesian system of coordinates. The location of the origin and the orientation of the axes with respect to the real earth are also included. -
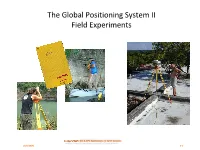
The Global Positioning System II Field Experiments
The Global Positioning System II Field Experiments Geo327G/386G: GIS & GPS Applications in Earth Sciences Jackson School of Geosciences, University of Texas at Austin 10/8/2020 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-2 Are Cenote Water Levels Related? Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-3 DGPS Static Survey of Cenote Water Levels Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-4 Determining Orthometric Heights ❑Ortho. Height = H.A.E. – Geoid Height Height above MSL (Orthometric height) H.A.E. Geoid height Earth Surface = H.A.E. Geoid Ellipsoid Geoid Height Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-5 Determining Orthometric Heights ❑Ortho. Height = (H.A.E. – Geoid Height) Need: 1) Ellipsoid model – GRS80 – NAVD88 ❑reference stations: HARN (+ 2 cm), CORS (+ ~2 cm) 2) Geoid model – GEOID99 ( + 5 cm for US) Procedure: Base receiver at reference station, rover at point of interest a) measure HAE, apply DGS corrections b) subtract local Geoid Height Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-6 Sources of Error ❑Geoid error – model less well constrained in areas of few gravity measurement ❑NAVD88 error – benchmark stability, measurement errors ❑GPS errors – need precise ephemeri, tropospheric delay model, equipment (antennae should be same for base and rover) Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-7 Static Carrier-phase solutions obtained by: ❑Commercial post-processing software ❑e.g. -

Gravity, Geoid and Earth Observation IAG Commission 2: Gravity Field, Chania, Crete, Greece, 23-27 June 2008
S.P. Mertikas (Ed.) Gravity, Geoid and Earth Observation IAG Commission 2: Gravity Field, Chania, Crete, Greece, 23-27 June 2008 Series: International Association of Geodesy Symposia, Vol. 135 ▶ State of the art scientific achievements of gravity field research prospects These Proceedings include the written version of papers presented at the IAG International Symposium on "Gravity, Geoid and Earth Observation 2008". The Symposium was held in Chania, Crete, Greece, 23-27 June 2008 and organized by the Laboratory of Geodesy and Geomatics Engineering, Technical University of Crete, Greece. The meeting was arranged by the International Association of Geodesy and in particular by the IAG Commission 2: Gravity Field. The symposium aimed at bringing together geodesists and geophysicists working in the 2010, XXXIV, 702 p. 340 illus. general areas of gravity, geoid, geodynamics and Earth observation. Besides covering the traditional research areas, special attention was paid to the use of geodetic methods for: Earth observation, environmental monitoring, Global Geodetic Observing System (GGOS), Printed book Earth Gravity Models (e.g., EGM08), geodynamics studies, dedicated gravity satellite Hardcover missions (i.e., GOCE), airborne gravity surveys, Geodesy and geodynamics in polar regions, and the integration of geodetic and geophysical information. ▶ 299,99 € | £249.99 | $379.99 ▶ *320,99 € (D) | 329,99 € (A) | CHF 354.00 eBook Available from your bookstore or ▶ springer.com/shop MyCopy Printed eBook for just ▶ € | $ 24.99 ▶ springer.com/mycopy Order online at springer.com ▶ or for the Americas call (toll free) 1-800-SPRINGER ▶ or email us at: [email protected]. ▶ For outside the Americas call +49 (0) 6221-345-4301 ▶ or email us at: [email protected]. -

JHR Final Report Template
TRANSFORMING NAD 27 AND NAD 83 POSITIONS: MAKING LEGACY MAPPING AND SURVEYS GPS COMPATIBLE June 2015 Thomas H. Meyer Robert Baron JHR 15-327 Project 12-01 This research was sponsored by the Joint Highway Research Advisory Council (JHRAC) of the University of Connecticut and the Connecticut Department of Transportation and was performed through the Connecticut Transportation Institute of the University of Connecticut. The contents of this report reflect the views of the authors who are responsible for the facts and accuracy of the data presented herein. The contents do not necessarily reflect the official views or policies of the University of Connecticut or the Connecticut Department of Transportation. This report does not constitute a standard, specification, or regulation. i Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. JHR 15-327 N/A 4. Title and Subtitle 5. Report Date Transforming NAD 27 And NAD 83 Positions: Making June 2015 Legacy Mapping And Surveys GPS Compatible 6. Performing Organization Code CCTRP 12-01 7. Author(s) 8. Performing Organization Report No. Thomas H. Meyer, Robert Baron JHR 15-327 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) University of Connecticut N/A Connecticut Transportation Institute 11. Contract or Grant No. Storrs, CT 06269-5202 N/A 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Connecticut Department of Transportation Final 2800 Berlin Turnpike 14. Sponsoring Agency Code Newington, CT 06131-7546 CCTRP 12-01 15. Supplementary Notes This study was conducted under the Connecticut Cooperative Transportation Research Program (CCTRP, http://www.cti.uconn.edu/cctrp/). -

The History of Geodesy Told Through Maps
The History of Geodesy Told through Maps Prof. Dr. Rahmi Nurhan Çelik & Prof. Dr. Erol KÖKTÜRK 16 th May 2015 Sofia Missionaries in 5000 years With all due respect... 3rd FIG Young Surveyors European Meeting 1 SUMMARIZED CHRONOLOGY 3000 BC : While settling, people were needed who understand geometries for building villages and dividing lands into parts. It is known that Egyptian, Assyrian, Babylonian were realized such surveying techniques. 1700 BC : After floating of Nile river, land surveying were realized to set back to lost fields’ boundaries. (32 cm wide and 5.36 m long first text book “Papyrus Rhind” explain the geometric shapes like circle, triangle, trapezoids, etc. 550+ BC : Thereafter Greeks took important role in surveying. Names in that period are well known by almost everybody in the world. Pythagoras (570–495 BC), Plato (428– 348 BC), Aristotle (384-322 BC), Eratosthenes (275–194 BC), Ptolemy (83–161 BC) 500 BC : Pythagoras thought and proposed that earth is not like a disk, it is round as a sphere 450 BC : Herodotus (484-425 BC), make a World map 350 BC : Aristotle prove Pythagoras’s thesis. 230 BC : Eratosthenes, made a survey in Egypt using sun’s angle of elevation in Alexandria and Syene (now Aswan) in order to calculate Earth circumferences. As a result of that survey he calculated the Earth circumferences about 46.000 km Moreover he also make the map of known World, c. 194 BC. 3rd FIG Young Surveyors European Meeting 2 150 : Ptolemy (AD 90-168) argued that the earth was the center of the universe. -

Advanced Positioning for Offshore Norway
Advanced Positioning for Offshore Norway Thomas Alexander Sahl Petroleum Geoscience and Engineering Submission date: June 2014 Supervisor: Sigbjørn Sangesland, IPT Co-supervisor: Bjørn Brechan, IPT Norwegian University of Science and Technology Department of Petroleum Engineering and Applied Geophysics Summary When most people hear the word coordinates, they think of latitude and longitude, variables that describe a location on a spherical Earth. Unfortunately, the reality of the situation is far more complex. The Earth is most accurately represented by an ellipsoid, the coordinates are three-dimensional, and can be found in various forms. The coordinates are also ambiguous. Without a proper reference system, a geodetic datum, they have little meaning. This field is what is known as "Geodesy", a science of exactly describing a position on the surface of the Earth. This Thesis aims to build the foundation required for the position part of a drilling software. This is accomplished by explaining, in detail, the field of geodesy and map projections, as well as their associated formulae. Special considerations is taken for the area offshore Norway. Once the guidelines for transformation and conversion have been established, the formulae are implemented in MATLAB. All implemented functions are then verified, for every conceivable method of opera- tion. After which, both the limitation and accuracy of the various functions are discussed. More specifically, the iterative steps required for the computation of geographic coordinates, the difference between the North Sea Formulae and the Bursa-Wolf transformation, and the accuracy of Thomas-UTM series for UTM projections. The conclusion is that the recommended guidelines have been established and implemented. -

Census Bureau Public Geocoder
1. What is Geocoding? Geocoding is an attempt to provide the geographic location (latitude, longitude) of an address by matching the address to an address range. The address ranges used in the geocoder are the same address ranges that can be found in the TIGER/Line Shapefiles which are derived from the Master Address File (MAF). The address ranges are potential address ranges, not actual address ranges. Potential ranges include the full range of possible structure numbers even though the actual structures might not exist. The majority of the address ranges we have are for residential areas. There are limited address ranges available in commercial areas. Our address ranges are regularly updated with the most current information we have available to us. The hypothetical graphic below may help customers understand the concept of geocoding and Census Geography (addresses displayed in this document are factitious and shown for example only.) If we look at Block 1001 in the example below the address range in red 101-199 is the range of numbers that overlap the actual individual house numbers associated with the blue circles (e.g. 103, 117, 135 and 151 Main St) on that side of the street (i.e. the Left side, note the arrow is pointing to the right on Main Street.) Based on this logic, the from address would be 101 and the to address would be 199 for this address range. Besides providing a user with the geographic location of an address the Census Geocoder can also provide all of the additional Census geographic information associated with a location, for example a Census Block, Tract, County, and State.