EVA-EXP-0042 REVISION B National Aeronautics and EFFECTIVE D at E: OCTOBER 19, 2020 Space Administration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mission to Jupiter
This book attempts to convey the creativity, Project A History of the Galileo Jupiter: To Mission The Galileo mission to Jupiter explored leadership, and vision that were necessary for the an exciting new frontier, had a major impact mission’s success. It is a book about dedicated people on planetary science, and provided invaluable and their scientific and engineering achievements. lessons for the design of spacecraft. This The Galileo mission faced many significant problems. mission amassed so many scientific firsts and Some of the most brilliant accomplishments and key discoveries that it can truly be called one of “work-arounds” of the Galileo staff occurred the most impressive feats of exploration of the precisely when these challenges arose. Throughout 20th century. In the words of John Casani, the the mission, engineers and scientists found ways to original project manager of the mission, “Galileo keep the spacecraft operational from a distance of was a way of demonstrating . just what U.S. nearly half a billion miles, enabling one of the most technology was capable of doing.” An engineer impressive voyages of scientific discovery. on the Galileo team expressed more personal * * * * * sentiments when she said, “I had never been a Michael Meltzer is an environmental part of something with such great scope . To scientist who has been writing about science know that the whole world was watching and and technology for nearly 30 years. His books hoping with us that this would work. We were and articles have investigated topics that include doing something for all mankind.” designing solar houses, preventing pollution in When Galileo lifted off from Kennedy electroplating shops, catching salmon with sonar and Space Center on 18 October 1989, it began an radar, and developing a sensor for examining Space interplanetary voyage that took it to Venus, to Michael Meltzer Michael Shuttle engines. -

KENNEDY SPACE CENTER – APOLLO to MULTI-USER SPACEPORT Philip J
THE 2ND GROUND-BASED SPACE FACILITIES SYMPOSIUM 17-19 October 2017, Toulouse, France KENNEDY SPACE CENTER – APOLLO TO MULTI-USER SPACEPORT Philip J. Weber (1), Howard S. Kanner, PhD, CSEP (2) (1) National Aeronautics and Space Administration MS LX, Kennedy Space Center, FL, 32899, USA, [email protected] (2) All Points Logistics, LLC MS LX-C-LCC, Kennedy Space Center, FL, 32899, USA, [email protected] ABSTRACT NASA Kennedy Space Center (KSC) was established as the gateway to exploring beyond earth. Since the establishment of KSC in December 1963, the Center has been critical in the execution of the United States of America’s bold mission to send astronauts beyond the grasp of the terra firma. On May 25, 1961, a few weeks after a Soviet cosmonaut became the first person to fly in space, President John F. Kennedy laid out the ambitious goal “of landing a man on the moon and returning him safely to the Earth” by the end of the decade. The resultant Apollo program was massive endeavor, driven by the Cold War Space Race, and supported with a robust budget. The Apollo program consisted of 18 launches from newly developed infrastructure, including 12 manned missions and six lunar landings, ending with Apollo 17 that launched on December 7, 1972. Continuing to use this infrastructure, the Skylab program launched four missions. During the Skylab program, KSC infrastructure was redesigned to meet the needs of the Space Shuttle program, which launched its first vehicle (STS-1) on April 12, 1981. The Space Shuttle required significant modifications to the Apollo launch pads and assembly facilities, as well as new infrastructure, such as Orbiter and Payload Processing Facilities, as well as the Shuttle Landing Facility. -

Comet Lemmon, Now in STEREO 25 April 2013, by David Dickinson
Comet Lemmon, Now in STEREO 25 April 2013, by David Dickinson heads northward through the constellation Pisces. NASA's twin Solar TErrestrial RElations Observatory (STEREO) spacecraft often catch sungrazing comets as they observe the Sun. Known as STEREO A (Ahead) & STEREO B (Behind), these observatories are positioned in Earth leading and trailing orbits. This provides researchers with full 360 degree coverage of the Sun. Launched in 2006, STEREO also gives us a unique perspective to spy incoming sungrazing comets. Recently, STEREO also caught Comet 2011 L4 PanSTARRS and the Earth as the pair slid into view. Another solar observing spacecraft, the European Space Agencies' SOlar Heliospheric Observatory (SOHO) has been a prolific comet discoverer. Amateur comet sleuths often catch new Kreutz group sungrazers in the act. Thus far, SOHO has Animation of Comet 2012 F6 Lemmon as seen from discovered over 2400 comets since its launch in NASA’s STEREO Ahead spacecraft. Credit: 1995. SOHO won't see PanSTARRS or Lemmon in NASA/GSFC; animation created by Robert Kaufman its LASCO C3 camera but will catch a glimpse of Comet 2012 S1 ISON as it nears the Sun late this coming November. An icy interloper was in the sights of a NASA Like SOHO and NASA's Solar Dynamics spacecraft this past weekend. Comet 2012 F6 Observatory, data from the twin STEREO Lemmon passed through the field of view of spacecraft is available for daily perusal on their NASA's HI2A camera as seen from its solar website. We first saw this past weekend's observing STEREO Ahead spacecraft. As seen in animation of Comet Lemmon passing through the animation above put together by Robert STEREO's field of view on the Yahoo Kaufman, Comet Lemmon is now displaying a fine STEREOHunters message board. -
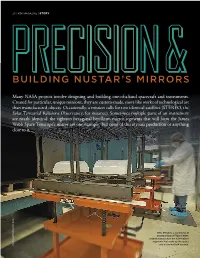
Building Nustar's Mirrors
20 | ASK MAGAZINE | STORY Title BY BUILDING NUSTAR’S MIRRORS Intro Many NASA projects involve designing and building one-of-a-kind spacecraft and instruments. Created for particular, unique missions, they are custom-made, more like works of technological art than manufactured objects. Occasionally, a mission calls for two identical satellites (STEREO, the Solar Terrestrial Relations Observatory, for instance). Sometimes multiple parts of an instrument are nearly identical: the eighteen hexagonal beryllium mirror segments that will form the James Webb Space Telescope’s mirror are one example. But none of this is mass production or anything close to it. nn GuisrCh/ASA N:tide CrothoP N:tide GuisrCh/ASA nn Niko Stergiou, a contractor at Goddard Space Flight Center, helped manufacture the 9,000 mirror segments that make up the optics unit in the NuSTAR mission. ASK MAGAZINE | 21 BY WILLIAM W. ZHANG The mirror segments my group has built for NuSTAR, the the interior surface and a bakeout, dries into a smooth and clean Nuclear Spectroscopic Telescope Array, are not mass produced surface, very much like glazed ceramic tiles. Finally we had to either, but we make them on a scale that may be unique at NASA: map the temperatures inside each oven to ensure they would we created more than 20,000 mirror segments over a period of two provide a uniform heating environment so the glass sheets years. In other words, we’re talking about some middle ground could slump in a controlled and gradual way. Any “wrinkles” between one-of-a-kind custom work and industrial production. -

Observational Artifacts of Nustar: Ghost-Rays and Stray-Light
Observational Artifacts of NuSTAR: Ghost-rays and Stray-light Kristin K. Madsena, Finn E. Christensenb, William W. Craigc, Karl W. Forstera, Brian W. Grefenstettea, Fiona A. Harrisona, Hiromasa Miyasakaa, and Vikram Ranaa aCalifornia Institute of Technology, 1200 E. California Blvd, Pasadena, USA bDTU Space, National Space Institute, Technical University of Denmark, Elektronvej 327, DK-2800 Lyngby, Denmark cSpace Sciences Laboratory, University of California, Berkeley, CA 94720, USA ABSTRACT The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, flies two conical approximation Wolter-I mirrors at the end of a 10.15 m mast. The optics are coated with multilayers of Pt/C and W/Si that operate from 3{80 keV. Since the optical path is not shrouded, aperture stops are used to limit the field of view from background and sources outside the field of view. However, there is still a sliver of sky (∼1.0{4.0◦) where photons may bypass the optics altogether and fall directly on the detector array. We term these photons Stray-light. Additionally, there are also photons that do not undergo the focused double reflections in the optics and we term these Ghost Rays. We present detailed analysis and characterization of these two components and discuss how they impact observations. Finally, we discuss how they could have been prevented and should be in future observatories. Keywords: NuSTAR, Optics, Satellite 1. INTRODUCTION 1 arXiv:1711.02719v1 [astro-ph.IM] 7 Nov 2017 The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, is a focusing X-ray observatory operating in the energy range 3{80 keV. -

NASA's Lunar Orbital Platform-Gatway
The Space Congress® Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM NASA's Lunar Orbital Platform-Gatway Tracy Gill NASA/KSC Technology Strategy Manager Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Gill, Tracy, "NASA's Lunar Orbital Platform-Gatway" (2018). The Space Congress® Proceedings. 17. https://commons.erau.edu/space-congress-proceedings/proceedings-2018-45th/presentations/17 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. National Aeronautics and Space Administration NASA’s Lunar Orbital Platform- Gateway Tracy Gill NASA/Kennedy Space Center Exploration Research & Technology Programs February 28, 2018 45th Space Congress Space Policy Directive-1 “Lead an innovative and sustainable program of exploration with commercial and international partners to enable human expansion across the solar system and to bring back to Earth new knowledge and opportunities. Beginning with missions beyond low-Earth orbit, the United States will lead the return of humans to the Moon for long-term exploration and utilization, followed by human missions to Mars and other destinations.” 2 LUNAR EXPLORATION CAMPAIGN 3 4 STRATEGIC PRINCIPLES FOR SUSTAINABLE EXPLORATION • FISCAL REALISM • ECONOMIC OPPORTUNITY Implementable in the near-term with the buying -
Little Books on Art General Editor: Cyril Davenport
L I TTL E B O O K S O N A R T GENERAL EDITOR : CY RIL DAVENPORT COR OT L I T T L E BO O K S O N A R T 1 01 2s 6d. n et Demy 6 0. S U B J E C T S I K N MINIATU RES . AL CE COR RA B DWA D ALMA CK OOKPLATES . E R R E H B WA T G E K A . L E RT. RS R AR T H B W T OMAN . AL ERS H MRS . A W Y T E ARTS OF JAPAN . C M S L E W R V N P T JE ELLE Y . C . DA E OR R R MRS . H . N N CH IST IN A T. JE ER R RS H N N R A T M . OU LADY IN . JE ER HR M B H N N C ISTIAN SY OLISM . JE ER W B ADLEY ILLUMINATED MSS . J . R R W ENAMELS . M S . NELSON DA SON R G N MEw FURNITU E . E A A R T I S T S R GEO GE PA TON OMNEY. R S R I N DU ER. L. JESS E ALLE IM REYNOLDS . J . S E W I R K TCH Y A S . D S E LE TT M SS E . PPN E H K IPT N HO R . P . K . S O T R R RAN CE Y ELL-GILL U NE . F S T RR H R H GAN MEw OGA T . -

The Highenergy Sun at High Sensitivity: a Nustar Solar Guest
The High-Energy Sun at High Sensitivity: a NuSTAR Solar Guest Investigation Program A concept paper submitted to the Space Studies Board Heliophysics Decadal Survey by David M. Smith, Säm Krucker, Gordon Hurford, Hugh Hudson, Stephen White, Fiona Harrison (NuSTAR PI), and Daniel Stern (NuSTAR Project Scientist) Figure 1: Artist©s conception of the NuSTAR spacecraft Introduction and Overview Understanding the origin, propagation and fate of non-thermal electrons is an important topic in solar and space physics: it is these particles that present a danger for interplanetary probes and astronauts, and also these particles that carry diagnostic information that can teach us about acceleration processes elsewhere in the heliosphere and throughout the universe. Such non-thermal electrons can be detected via their X-ray or gamma-ray emission, their radio emission, or directly in situ in interplanetary space. To date, the state of the art in solar hard x-ray imaging has been the Reuven Ramaty High Energy Solar Spectroscopic Imager (RHESSI), a NASA Small Explorer satellite launched in 2002, which uses an indirect imaging method (rotating modulation collimators) for hard x-ray imaging. This technique can provide high angular resolution, but it is limited in dynamic range and in sensitivity to small events, due to high background. High-energy imaging of the active Sun is technically easiest in the soft x-ray band (see, for example, the detailed and dynamic images returned by the soft x- ray imager on Hinode, as well as the corresponding telescopes on Yohkoh and GOES), but these x-rays are generally emitted by lower-energy thermal plasmas. -

Low Altitude Solar Magnetic Reconnection, Type III Solar Radio Bursts, and X-Ray Emissions Received: 11 January 2015 I
www.nature.com/scientificreports OPEN Low Altitude Solar Magnetic Reconnection, Type III Solar Radio Bursts, and X-ray Emissions Received: 11 January 2015 I. H. Cairns 1, V. V. Lobzin1,23, A. Donea2, S. J. Tingay3, P. I. McCauley1, D. Oberoi4, R. T. Accepted: 18 December 2017 Dufn1,3,5, M. J. Reiner6,7, N. Hurley-Walker3, N. A. Kudryavtseva 3,8, D. B. Melrose1, J. C. Published: xx xx xxxx Harding1, G. Bernardi9,10,11, J. D. Bowman12, R. J. Cappallo13, B. E. Corey13, A. Deshpande14, D. Emrich 3, R. Goeke15, B. J. Hazelton16, M. Johnston-Hollitt17,3, D. L. Kaplan18, J. C. Kasper10, E. Kratzenberg13, C. J. Lonsdale13, M. J. Lynch3, S. R. McWhirter13, D. A. Mitchell19,3, M. F. Morales16, E. Morgan15, S. M. Ord3,10, T. Prabu14, A. Roshi20, N. Udaya Shankar14, K. S. Srivani15, R. Subrahmanyan14,20, R. B. Wayth 3,21, M. Waterson3,22, R. L. Webster19,21, A. R. Whitney13, A. Williams 3 & C. L. Williams15 Type III solar radio bursts are the Sun’s most intense and frequent nonthermal radio emissions. They involve two critical problems in astrophysics, plasma physics, and space physics: how collective processes produce nonthermal radiation and how magnetic reconnection occurs and changes magnetic energy into kinetic energy. Here magnetic reconnection events are identifed defnitively in Solar Dynamics Observatory UV-EUV data, with strong upward and downward pairs of jets, current sheets, and cusp-like geometries on top of time-varying magnetic loops, and strong outfows along pairs of open magnetic feld lines. Type III bursts imaged by the Murchison Widefeld Array and detected by the Learmonth radiospectrograph and STEREO B spacecraft are demonstrated to be in very good temporal and spatial coincidence with specifc reconnection events and with bursts of X-rays detected by the RHESSI spacecraft. -

Parker Solar Probe SWG Telecon February 5, 2020 Project Science Report Nour Raouafi Project Status Helene Winters Payload Status SB,JK,DM,RH Solar Orbiter H
Parker Solar Probe SWG Telecon February 5, 2020 Project Science Report Nour Raouafi Project Status Helene Winters Payload Status SB,JK,DM,RH Solar Orbiter H. Gilbert/C. St. Cyr SOC Activities Martha Kusterer Payload SE Telecon S. Hamilton/A. Reiter Theory Group M. Velli/A. Higginson Upcoming Meetings Nour Raouafi Science Presentations: DaviD Malaspina (LASP) & Karl Battams (NRL) Agenda • DCP 5 Information • DCP Type: Data Volume • Venus Flyby • Non-routine Activities & Science Priorities o WISPR o ISOIS o FIELDS o SWEAP • Modeling – Robert Allen • Coordinated observations. Parker Solar Probe Project Science SWG Telecon February 5, 2020 ApJS Special Issue (ApJ/SI) 50+ papers submitted as of Oct. 20, 2019 Early Results from Parker Solar Probe: Ushering a New Frontier in Space Exploration • Publication Date: February 3, 2020 • 48 papers accessible online • Few more papers still under review Corresponding authors: please speed up the reviewing process – Send me your submission info and the manuscript. • Print copies: Science Teams are you interested in ordering print copies of the special issue? 2/7/20 4 Nature Papers ADS not listing all the authors • ADS lists only three authors: the first two and the last one • The issue was addressed for the FIELDS and WISPR papers • But not for the SWEAP and ISOIS papers • ADS stated that that’s the information Nature sent to them • Corrections can submitted through http://adsabs.harvard.edu/adsfeedback/submit_abstract.php. 2/7/20 5 Future Publications • Let’s us know about your results in case we need to prepare for press releases • Animations take time to design and get ready • Please do not for the mission acknowledgements Parker Solar Probe was designed, built, and is now operated by the Johns Hopkins Applied Physics Laboratory as part of NASA’s Living with a Star (LWS) program (contract NNN06AA01C). -

The Orion Spacecraft As a Key Element in a Deep Space Gateway
The Orion Spacecraft as a Key Element in a Deep Space Gateway A Technical Paper Presented by: Timothy Cichan Lockheed Martin Space [email protected] Kerry Timmons Lockheed Martin Space [email protected] Kathleen Coderre Lockheed Martin Space [email protected] Willian D. Pratt Lockheed Martin Space [email protected] July 2017 © 2014 Lockheed Martin Corporation Abstract With the Orion exploration vehicle and Space Launch System (SLS) approaching operational status, NASA and the international community are developing the next generation of habitats to serve as a deep space platform that will be the first of its kind, a cislunar Deep Space Gateway (DSG). The DSG is evolvable, flexible, and modular. It would be positioned in the vicinity of the Moon and allow astronauts to demonstrate they can operate for months at a time well beyond Low Earth Orbit. Orion is the next generation human exploration spacecraft being developed by NASA. It is designed to perform deep space exploration missions, and is capable of carrying a crew of 4 astronauts on independent free-flight missions up to 21 days, limited only by consumables. Because Orion meets the strict requirements for deep space flight environments (reentry conditions, deep-space communications, safety, radiation, and life support for example) it is a key element in a DSG and is more than just a transportation system. Orion has the capability to act as the command deck of any deep space piloted vehicle. To increase affordability and reduce the complexity and number of subsystem functions the early DSG must be responsible for, the DSG can leverage these unique deep space qualifications of Orion. -

Localization of the Chang'e-5 Lander Using Radio-Tracking and Image
remote sensing Technical Note Localization of the Chang’e-5 Lander Using Radio-Tracking and Image-Based Methods Jia Wang 1, Yu Zhang 1, Kaichang Di 2,3 , Ming Chen 1, Jianfeng Duan 1, Jing Kong 1, Jianfeng Xie 1, Zhaoqin Liu 2, Wenhui Wan 2,*, Zhifei Rong 1, Bin Liu 2 , Man Peng 2 and Yexin Wang 2 1 Beijing Aerospace Control Center (BACC), Beijing 100094, China; [email protected] (J.W.); [email protected] (Y.Z.); [email protected] (M.C.); [email protected] (J.D.); [email protected] (J.K.); [email protected] (J.X.); [email protected] (Z.R.) 2 State Key Laboratory of Remote Sensing Science, Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100101, China; [email protected] (K.D.); [email protected] (Z.L.); [email protected] (B.L.); [email protected] (M.P.); [email protected] (Y.W.) 3 CAS Center for Excellence in Comparative Planetology, Hefei 230026, China * Correspondence: [email protected]; Tel.: +86-10-64807987 Abstract: Chang’e-5, China’s first unmanned lunar sample-return mission, was successfully landed in Northern Oceanus Procellarum on 1 December 2020. Determining the lander location precisely and timely is critical for both engineering operations and subsequent scientific research. Localization of the lander was performed using radio-tracking and image-based methods. The lander location was determined to be (51.92◦W, 43.06◦N) by both methods. Other localization results were compared for cross-validation. The localization results greatly contributed to the planning of the ascender lifting off from the lander and subsequent maneuvers, and they will contribute to scientific analysis of the returned samples and in situ acquired data.