Localization of the Chang'e-5 Lander Using Radio-Tracking and Image
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mission to Jupiter
This book attempts to convey the creativity, Project A History of the Galileo Jupiter: To Mission The Galileo mission to Jupiter explored leadership, and vision that were necessary for the an exciting new frontier, had a major impact mission’s success. It is a book about dedicated people on planetary science, and provided invaluable and their scientific and engineering achievements. lessons for the design of spacecraft. This The Galileo mission faced many significant problems. mission amassed so many scientific firsts and Some of the most brilliant accomplishments and key discoveries that it can truly be called one of “work-arounds” of the Galileo staff occurred the most impressive feats of exploration of the precisely when these challenges arose. Throughout 20th century. In the words of John Casani, the the mission, engineers and scientists found ways to original project manager of the mission, “Galileo keep the spacecraft operational from a distance of was a way of demonstrating . just what U.S. nearly half a billion miles, enabling one of the most technology was capable of doing.” An engineer impressive voyages of scientific discovery. on the Galileo team expressed more personal * * * * * sentiments when she said, “I had never been a Michael Meltzer is an environmental part of something with such great scope . To scientist who has been writing about science know that the whole world was watching and and technology for nearly 30 years. His books hoping with us that this would work. We were and articles have investigated topics that include doing something for all mankind.” designing solar houses, preventing pollution in When Galileo lifted off from Kennedy electroplating shops, catching salmon with sonar and Space Center on 18 October 1989, it began an radar, and developing a sensor for examining Space interplanetary voyage that took it to Venus, to Michael Meltzer Michael Shuttle engines. -

Comet Lemmon, Now in STEREO 25 April 2013, by David Dickinson
Comet Lemmon, Now in STEREO 25 April 2013, by David Dickinson heads northward through the constellation Pisces. NASA's twin Solar TErrestrial RElations Observatory (STEREO) spacecraft often catch sungrazing comets as they observe the Sun. Known as STEREO A (Ahead) & STEREO B (Behind), these observatories are positioned in Earth leading and trailing orbits. This provides researchers with full 360 degree coverage of the Sun. Launched in 2006, STEREO also gives us a unique perspective to spy incoming sungrazing comets. Recently, STEREO also caught Comet 2011 L4 PanSTARRS and the Earth as the pair slid into view. Another solar observing spacecraft, the European Space Agencies' SOlar Heliospheric Observatory (SOHO) has been a prolific comet discoverer. Amateur comet sleuths often catch new Kreutz group sungrazers in the act. Thus far, SOHO has Animation of Comet 2012 F6 Lemmon as seen from discovered over 2400 comets since its launch in NASA’s STEREO Ahead spacecraft. Credit: 1995. SOHO won't see PanSTARRS or Lemmon in NASA/GSFC; animation created by Robert Kaufman its LASCO C3 camera but will catch a glimpse of Comet 2012 S1 ISON as it nears the Sun late this coming November. An icy interloper was in the sights of a NASA Like SOHO and NASA's Solar Dynamics spacecraft this past weekend. Comet 2012 F6 Observatory, data from the twin STEREO Lemmon passed through the field of view of spacecraft is available for daily perusal on their NASA's HI2A camera as seen from its solar website. We first saw this past weekend's observing STEREO Ahead spacecraft. As seen in animation of Comet Lemmon passing through the animation above put together by Robert STEREO's field of view on the Yahoo Kaufman, Comet Lemmon is now displaying a fine STEREOHunters message board. -

Tianwen-1: China's Mars Mission
Tianwen-1: China's Mars Mission drishtiias.com/printpdf/tianwen-1-china-s-mars-mission Why In News China will launch its first Mars Mission - Tianwen-1- in July, 2020. China's previous ‘Yinghuo-1’ Mars mission, which was supported by a Russian spacecraft, had failed after it did not leave the earth's orbit and disintegrated over the Pacific Ocean in 2012. The National Aeronautics and Space Administration (NASA) is also going to launch its own Mars mission in July, the Perseverance which aims to collect Martian samples. Key Points The Tianwen-1 Mission: It will lift off on a Long March 5 rocket, from the Wenchang launch centre. It will carry 13 payloads (seven orbiters and six rovers) that will explore the planet. It is an all-in-one orbiter, lander and rover system. Orbiter: It is a spacecraft designed to orbit a celestial body (astronomical body) without landing on its surface. Lander: It is a strong, lightweight spacecraft structure, consisting of a base and three sides "petals" in the shape of a tetrahedron (pyramid- shaped). It is a protective "shell" that houses the rover and protects it, along with the airbags, from the forces of impact. Rover: It is a planetary surface exploration device designed to move across the solid surface on a planet or other planetary mass celestial bodies. 1/3 Objectives: The mission will be the first to place a ground-penetrating radar on the Martian surface, which will be able to study local geology, as well as rock, ice, and dirt distribution. It will search the martian surface for water, investigate soil characteristics, and study the atmosphere. -
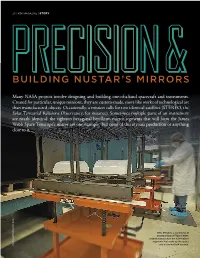
Building Nustar's Mirrors
20 | ASK MAGAZINE | STORY Title BY BUILDING NUSTAR’S MIRRORS Intro Many NASA projects involve designing and building one-of-a-kind spacecraft and instruments. Created for particular, unique missions, they are custom-made, more like works of technological art than manufactured objects. Occasionally, a mission calls for two identical satellites (STEREO, the Solar Terrestrial Relations Observatory, for instance). Sometimes multiple parts of an instrument are nearly identical: the eighteen hexagonal beryllium mirror segments that will form the James Webb Space Telescope’s mirror are one example. But none of this is mass production or anything close to it. nn GuisrCh/ASA N:tide CrothoP N:tide GuisrCh/ASA nn Niko Stergiou, a contractor at Goddard Space Flight Center, helped manufacture the 9,000 mirror segments that make up the optics unit in the NuSTAR mission. ASK MAGAZINE | 21 BY WILLIAM W. ZHANG The mirror segments my group has built for NuSTAR, the the interior surface and a bakeout, dries into a smooth and clean Nuclear Spectroscopic Telescope Array, are not mass produced surface, very much like glazed ceramic tiles. Finally we had to either, but we make them on a scale that may be unique at NASA: map the temperatures inside each oven to ensure they would we created more than 20,000 mirror segments over a period of two provide a uniform heating environment so the glass sheets years. In other words, we’re talking about some middle ground could slump in a controlled and gradual way. Any “wrinkles” between one-of-a-kind custom work and industrial production. -

Observational Artifacts of Nustar: Ghost-Rays and Stray-Light
Observational Artifacts of NuSTAR: Ghost-rays and Stray-light Kristin K. Madsena, Finn E. Christensenb, William W. Craigc, Karl W. Forstera, Brian W. Grefenstettea, Fiona A. Harrisona, Hiromasa Miyasakaa, and Vikram Ranaa aCalifornia Institute of Technology, 1200 E. California Blvd, Pasadena, USA bDTU Space, National Space Institute, Technical University of Denmark, Elektronvej 327, DK-2800 Lyngby, Denmark cSpace Sciences Laboratory, University of California, Berkeley, CA 94720, USA ABSTRACT The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, flies two conical approximation Wolter-I mirrors at the end of a 10.15 m mast. The optics are coated with multilayers of Pt/C and W/Si that operate from 3{80 keV. Since the optical path is not shrouded, aperture stops are used to limit the field of view from background and sources outside the field of view. However, there is still a sliver of sky (∼1.0{4.0◦) where photons may bypass the optics altogether and fall directly on the detector array. We term these photons Stray-light. Additionally, there are also photons that do not undergo the focused double reflections in the optics and we term these Ghost Rays. We present detailed analysis and characterization of these two components and discuss how they impact observations. Finally, we discuss how they could have been prevented and should be in future observatories. Keywords: NuSTAR, Optics, Satellite 1. INTRODUCTION 1 arXiv:1711.02719v1 [astro-ph.IM] 7 Nov 2017 The Nuclear Spectroscopic Telescope Array (NuSTAR), launched in June 2012, is a focusing X-ray observatory operating in the energy range 3{80 keV. -

350 International Atlas of Lunar Exploration 8 January 1973
:UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 350 [7428] 19.8.20073:28PM 350 International Atlas of Lunar Exploration 8 January 1973: Luna 21 and Lunokhod 2 (Soviet Union) The 4850 kg Luna 21 spacecraft was launched from Baikonur at 06:56 UT on a Proton booster, placed in a low Earth parking orbit and then put on a lunar trajec tory. Power problems required that the Lunokhod solar panel be opened in flight to augment power, and stowed again for the trajectory correction and orbit insertion burns and for landing. On 12 January Luna 21 entered a 90 km by 100 km lunar orbit inclined 60° to the equator. After a day in orbit the low point was reduced to 16 km, and on 15 January after 40 orbits the vehicle braked and dropped to just 750 m above the surface. Then the main thrusters slowed the descent, and at :UP/3-PAGINATION/IAW-PROOFS/3B2/978«52181«5(M.3D 351 [7428] 19.8.20073:28PM Chronological sequence of missions and events 351 22 m a set of secondary thrusters took over until the After landing, Lunokhod 2 surveyed its surround spacecraft was only 1.5 meters high, when the thrusters ings. A rock partly blocked the west-facing ramp so the were shut off. Landing time was 23:35 UT. rover was driven east across a shallow crater, leaving the The site was in Le Monnier crater on the eastern edge lander at 01:14 UT on 16 January. It rested 30 m from of Mare Serenitatis, 180 km north of the Apollo 17 land the descent stage to recharge its batteries until 18 ing site, at 25.85° N, 30.45° E (Figure 327A). -

JAXA's Space Exploration Activities
JAXA’s Space Exploration Activities Jun Gomi, Deputy Director General, JAXA Hayabusa 2 ✓ Asteroid Explorer of the C-type asteroid ✓ Launched in December, 2014 ✓ Reached target asteroid “Ryugu” in 2018 ✓ First successful touchdown to Ryugu on February 22, 2019 ✓ Return to Earth in 2020 (162173) Ryugu 2 Hayabusa 2 (c) JAXA, University of Tokyo, Kochi University, Rikkyo University, (c) JAXA, University of Tokyo, Kochi University, Rikkyo University, Nagoya University, Chiba Institute of Technology, Meiji University, Nagoya University, Chiba Institute of Technology, Meiji University, University of Aizu and AIST. University of Aizu, AIST Asteroid Ryugu photographed from a Asteroid Ryugu from an altitude of 6km. distance of about 20 km. The image Image was captured with the Optical was taken on June 30, 2018. Navigation Camera on July 20, 2018. Hayabusa 2 4 JAXA’s Plan for Space Exploration International • Utilization of ISS/Kibo • Cis-Lunar Platform (Gateway) Cooperation • Lunar exploration and beyond Industry & • JAXA Space Exploration Innovation Academia Hub Partnerships • Science Community discussions JAXA’s Overall Scenario for International Space Exploration Mars, others ★ Initial Exploration ★ Full Fledge Exploration MMX: JFY2024 • Science and search for life • Utilization feasibility exam. Kaguya Moon ©JAXA ©JAXA ©JAXA ©JAXA ©JAXA Full-fledged Exploration & SLIM Traversing exploration(2023- ) Sample Return(2026- ) Utilization (JFY2021) • Science exploration • S/R from far side • Cooperative science/resource • Water prospecting • Technology demo for human mission exploration by robotic and human HTV-X der.(2026- ) • Small probe deploy, data relay etc. Gateway Phase 1 Gateway (2022-) Phase 2 • Support for Lunar science Earth • Science using deep space Promote Commercialization International Space Station 6 SLIM (Smart Lander for Investigating Moon) ✓ Demonstrate pin-point landing on the moon. -

Concept for a Crewed Lunar Lander Operating from the Lunar Orbiting Platform-Gateway
69th International Astronautical Congress (IAC), Bremen, Germany, 1-5 October 2018. Copyright © 2018 by Lockheed Martin Corporation. Published by the IAF, with permission and released to the IAF to publish in all forms. IAC-18.A5.1.4x46653 Concept for a Crewed Lunar Lander Operating from the Lunar Orbiting Platform-Gateway Timothy Cichana*, Stephen A. Baileyb, Adam Burchc, Nickolas W. Kirbyd aSpace Exploration Architect, P.O. Box 179, MS H3005, Lockheed Martin Space, Denver, Colorado, U.S.A. 80201, [email protected] bPresident, 8100 Shaffer Parkway, Unit 130, Deep Space Systems, Inc., Littleton, Colorado, 80127-4124, [email protected] cDesign Engineer / Graphic Artist, 8341 Sangre de Christo Rd, Deep Space Systems, Inc., Littleton, Colorado, 80127, [email protected] dSystems Engineer, Advanced Programs, P.O. Box 179, MS H3005, Lockheed Martin Space, Denver, Colorado, U.S.A. 80201, [email protected] * Corresponding Author Abstract Lockheed Martin is working with NASA on the development of the Lunar Orbiting Platform – Gateway, or Gateway. Positioned in the vicinity of the Moon, the Gateway allows astronauts to demonstrate operations beyond Low Earth Orbit for months at a time. The Gateway is evolvable, flexible, modular, and is a precursor and mission demonstrator directly on the path to Mars. Mars Base Camp is Lockheed Martin's vision for sending humans to Mars. Operations from an orbital base camp will build on a strong foundation of today's technologies and emphasize scientific exploration as mission cornerstones. Key aspects of Mars Base Camp include utilizing liquid oxygen and hydrogen as the basis for a nascent water-based economy and the development of a reusable lander/ascent vehicle. -

Searching for Lunar Horizon Glow with the Lunar Orbiter Laser Altimeter (LOLA)
Searching for lunar horizon glow with the lunar orbiter laser altimeter (LOLA) M. K. Barker, D. Smith, T. McClanahan, E. Mazarico, X. Sun, M. T. Zuber, G. A. Neumann, M. H. Torrence, J. W. Head DAP-2017 Boulder, CO Jan. 11-13, 2017 Lunar Horizon Glow • Surveyor landers, Lunokhod-2 lander, Apollo 17 astronaut sketches (Rennilson & Criswell 1974, Severnyi et al. 1975, McCoy & Criswell 1974, Zook & McCoy 1991) ==> Electrostatic levitation, dynamic lofting (Stubbs et al. 2006, Farrell et al. 2007) • Apollo 15 photographs at dawn: LHG extending ~30 km above horizon, N~103-105 cm-2 for grain r = 0.1 µm (McCoy 1976, Glenar et al. 2011) ==> Meteor stream impact ejecta could initiate a saltation-like cascade process • Recent searches with Clementine Star Trackers, LRO/LAMP, and LADEE/LDEX gave limits on dust density ~100x lower than A15 (Glenar et al. 2014, Feldman et al. 2014, Szalay & Horányi 2015, Horányi et al. 2015) Glenar et al. (2011) Lunar Orbiter ~65 m Diffractive Optical Element Laser Altimeter (LOLA) •5-beam time-of-flight laser altimeter onboard the Lunar Reconnaissance 50 m Orbiter (LRO) 5-m diameter •28 Hz laser, 140 measurements/sec observation area (red) •Each shot provides: • up to 5 ranges to surface (10 cm prec.) 20-m FOV (green) • footprint-scale surface roughness • footprint-scale slope 10 to 12 m apart • 1064-nm reflectance of surface along track •Detectors: 5 fiber optically-coupled avalanche photodiodes LOLA has two radiometric modes: (1) Active radiometry: LOLA laser is the light source. 1064-nm normal albedo Lemelin et al. (2016) (2) Passive radiometry: Sun is the light source. -
The Sun As a Gravitational Lens : a Target for Space Missions a Target
“New Trends in Astrodynamics and Applications - V” Po litecn ico di Mil ano, Mil ano (It al y) , 30 J une, 1 -2 Ju ly 2008 The Sun as a Gravitational Lens : A Target for Space Missions Reaching 550 AU to 1000 AU Claudio Maccone Member of the International Academy of Astronautics Home Paggpe: http://www.maccone.com/ E-mail: [email protected] 1 Gravitational Lens of the Sun Figure 1: Basic geometry of the gravitational lens of the Sun: the minimal focal length at 550 AU and the FOCAL spacecraft position. 2 Gravitational Lens of the Sun • The geometry of the Sun gravitational lens is easily described: incoming electromagnetic waves (arriving, for instance, from the center of the Galaxy) pass outside the Sun and pass wihiithin a certain distance r of its center. • Then a basic result following from General Relativity shows that the corresponding dfltideflection angle ()(r) at the distance r from the Sun center is given by (Einstein, 1907): 4GM α (r ) = Sun . c 2 r 3 Gravitational Lens of the Sun • Let’s set the following parameters for the Sun: 1. Assumed Mass of the Sun: 1.9889164628 . 1030 kg, that is μSun = 132712439900 kg3s-2 2. Assumed Radius of the Sun: 696000 km 3. Sun Mean Density: 1408.316 kgm-3 4. Sc hwarzsc hild radi us of th e S un: 2 .953 k m One then finds the BASIC RESULT: MINIMAL FOCAL DISTANCE OF THE SUN: 548.230 AU ~ 3.17 light days ~ 13. 86 times th e Sun-to-Plut o di st ance. -
Little Books on Art General Editor: Cyril Davenport
L I TTL E B O O K S O N A R T GENERAL EDITOR : CY RIL DAVENPORT COR OT L I T T L E BO O K S O N A R T 1 01 2s 6d. n et Demy 6 0. S U B J E C T S I K N MINIATU RES . AL CE COR RA B DWA D ALMA CK OOKPLATES . E R R E H B WA T G E K A . L E RT. RS R AR T H B W T OMAN . AL ERS H MRS . A W Y T E ARTS OF JAPAN . C M S L E W R V N P T JE ELLE Y . C . DA E OR R R MRS . H . N N CH IST IN A T. JE ER R RS H N N R A T M . OU LADY IN . JE ER HR M B H N N C ISTIAN SY OLISM . JE ER W B ADLEY ILLUMINATED MSS . J . R R W ENAMELS . M S . NELSON DA SON R G N MEw FURNITU E . E A A R T I S T S R GEO GE PA TON OMNEY. R S R I N DU ER. L. JESS E ALLE IM REYNOLDS . J . S E W I R K TCH Y A S . D S E LE TT M SS E . PPN E H K IPT N HO R . P . K . S O T R R RAN CE Y ELL-GILL U NE . F S T RR H R H GAN MEw OGA T . -

ESA's Gaia Mission: a Billion Stars with a Billion Pixels
FOCUS I PHOTONIC TECHNIQUES AND TECHNOLOGIES ESA’S GAIA MISSION: a billion stars with a billion pixels Jos DE BRUIJNE 1 Astrometry is the astronomical discipline of measuring the positions, 2 Matthias ERDMANN and changes therein, of celestial bodies. Accurate astrometry from 1 Directorate of Science, European Space Agency, ESA/ESTEC, the ground is limited by the blurring effects induced by the Earth’s The Netherlands atmosphere. Since decades, Europe has been at the forefront of 2 Directorate of Earth Observation, making astrometric measurements from space. The European Space European Space Agency, ESA/ ESTEC, The Netherlands Agency (ESA) launched the first satellite dedicated to astrometry, [email protected] named Hipparcos, in 1989, culminating in the release of the Hipparcos Catalogue containing astrometric data for 117 955 stars in 1997. Since mid 2014, Hipparcos’ successor, Gaia, has been collecting astrometric data, with a 100 times improved precision, for 10 000 times as many stars. lthough astrometry sounds revolves around the sun – and of pro- the telescope in 1608, the first reliable boring, it is of fundamental per motion – the continuous, true parallax measurement of a star other Aimportance to many branches displacement of a star on the sky as than the sun was only made in 1838. of astronomy and astrophysics. The a result of its velocity in space relative The reason for this late success is the reason for this is that astrometry can to the sun. Measuring the distances fact that stars are located at extremely determine