Saturn V Flight Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Space Administration
https://ntrs.nasa.gov/search.jsp?R=19700024651 2020-03-23T18:20:34+00:00Z TO THE CONGRESSOF THE UNITEDSTATES : Transmitted herewith is the Twenty-first Semiannual Repol* of the National Aeronautics and Space Administration. Twen~-first SEMIANNUAL REPORT TO CONGRESS JANUARY 1 - JUNE 30, 1969 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. 20546 Editors: G. B. DeGennaro, H. H. Milton, W. E. Boardman, Office of Public Affairs; Art work: A. Jordan, T. L. Lindsey, Office of Organiza- tion and Management. For sale by the Superintendent of Documents, U.S. Government Printing Office Washington, D.C. 20402-Price $1.25 THE PRESIDENT May 27,1970 The White House I submit this Twenty-First Semiannual Report of the National Aeronautics and Space Aldministration to you for transmitttal to Congress in accordance with section 206(a) of the National Aero- nautics and Space Act of 1958. It reports on aotivities which took place betiween January 1 and June 30, 1969. During this time, the Nation's space program moved forward on schedule. ApolIo 9 and 10 demonstrated the ability of ;the man- ned Lunar Module to operate in earth and lunar orbit and its 'eadi- ness to attempt the lunar landing. Unmanned observatory and ex- plorer class satellites carried on scientific studies of the regions surrounding the Earth, the Moon, and the Sun; a Biosatellite oarwing complex biological science experiment was orbited; and sophisticated weather satellites and advanced commercial com- munications spacecraft became operational. Advanced research projects expanded knowledge of space flighk and spacecraft engi- neering as well as of aeronautics. -
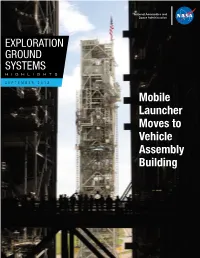
Mobile Launcher Moves to Vehicle Assembly Building EGS MONTHLY HIGHLIGHTS
National Aeronautics and Space Administration EXPLORATION GROUND SYSTEMS HIGHLIGHTS SEPTEMBER 2018 Mobile Launcher Moves to Vehicle Assembly Building EGS MONTHLY HIGHLIGHTS 3 Mobile launcher on the move 4 In the driver’s seat 5 Prepping for Underway Recovery Test 7 6 Employees, guests view ML move MOBILE LAUNCHER ON THE MOVE NASA’s mobile launcher is inside High Bay 3 at the Vehicle Assembly Building (VAB) on Sept. 11, 2018, at NASA’s Kennedy Space Center in Florida. Photo credit: NASA/Frank Michaux NASA’s mobile launcher, atop crawler-transporter 2, traveled from Launch Pad 39B to the Vehicle Assembly Building at the agency’s Kennedy Space Center in Florida, on Sept. 7, 2018. Arriving late in the afternoon, the mobile launcher stopped at the entrance to the VAB. Early the next day, Sept. 8, engineers and technicians rotated and extended the crew access arm near the top of the mobile launcher tower. Then the mobile launcher was moved inside High Bay 3, where it will spend about seven months undergoing verification and validation testing with the 10 levels of new work platforms, ensuring that it can provide support to the agency’s Space Launch System (SLS). The 380-foot-tall structure is equipped with the crew access Cliff Lanham, NASA project manager for the mobile launcher, takes a break arm and several umbilicals that will provide power, environmental to attend the employee event for the mobile launcher move to the Vehicle control, pneumatics, communication and electrical connections Assembly Building on Sept. 7, 2018, at NASA’s Kennedy Space Center in Florida. -

Progress Report on Apollo Program
PROGRESS REPORT ON APOLLO PROGRAM Michael Collins, LCol. USAF (M) Astronaut NASA-MANNED SPACECRAFT CENTER It is a great pleasure to be here today and to greet you hardy suMvors of the pool party. I will do my best to avoid loud noises and bright colors during my status report. Since the last SETP Symposium, the Apollo Program has been quite busy in a number of different areas. (Figure 1) My problem is to sift through this information and to talk only about those things of most interest to you. First, to review briefly our hardware, we are talking about two different spacecraft and two different boosters. (Figure 2) The Command Module is that part of the stack COLLINS which makes the complete round trip to the moon. Attached to it is the Service Module, containing expendables and a 20,000 pound thrust engine for maneuverability. The Lunar Module will be carried on later flights and is the landing vehicle and active rendezvous partner. The uprated Saturn I can put the Command and Service Modules into earth orbit; the Saturn V is required when the Lunar Module is added. Since the last symposium, we have flown the Command and Service Modules twice and the Lunar Module once, all unmanned. Apollo 4, the first Saturn V flight, was launched in November 1967. (Figure 3) The Saturn V did a beautiful, i.e. nominal, job of putting the spacecraft into earth parking orbit. After a coast period, the third stage (S-IVB by McDonnell Douglas) was ignited a second time, achieving a highly elliptical orbit. -

1993 (179Kb Pdf)
February 4, 1993 KSC Contact: Bruce Buckingham KSC Release No. 10-93 Notice To Editors/News Directors: KSC NEWS CENTER OFFICE HOURS FOR PEGASUS ARRIVAL The NASA B-52 aircraft carrying the Orbital Sciences Cor- poration Pegasus rocket is scheduled to arrive at KSC on Sunday, Feb. 7, with launch targeted for Feb. 9. The aircraft is currently scheduled to depart Edwards Air Force Base, Calif., at about 10:00 a.m. EST on Sunday with a single refueling stopover planned at Sheppard AFB, Texas. If weather permits, arrival of the aircraft at KSC's Shuttle Landing Facility should be about 4:30 p.m. EST. Status updates regarding the cross-country flight will be made on KSC's codaphone over the weekend. This can be reached by calling 407/867-2525. Public Affairs officers will be in the KSC Press Site office by 9:30 a.m. Sunday in order to provide status updates by phone. The office, however, will not officially open until it is deter- mined the aircraft will in fact be arriving at KSC. If it is determined that the aircraft will be successful in completing the day-long trip to KSC on Sunday, the office will officially open at 3:00 p.m. In that event, media interested in viewing the B-52/Pegasus arrival should plan on calling the KSC news center at 407/867-2468 for departure times to the Shuttle Landing Facility. News media who do not possess current credentials must con- tact the Public Information Office before close of business Friday, Feb. -

The SKYLON Spaceplane
The SKYLON Spaceplane Borg K.⇤ and Matula E.⇤ University of Colorado, Boulder, CO, 80309, USA This report outlines the major technical aspects of the SKYLON spaceplane as a final project for the ASEN 5053 class. The SKYLON spaceplane is designed as a single stage to orbit vehicle capable of lifting 15 mT to LEO from a 5.5 km runway and returning to land at the same location. It is powered by a unique engine design that combines an air- breathing and rocket mode into a single engine. This is achieved through the use of a novel lightweight heat exchanger that has been demonstrated on a reduced scale. The program has received funding from the UK government and ESA to build a full scale prototype of the engine as it’s next step. The project is technically feasible but will need to overcome some manufacturing issues and high start-up costs. This report is not intended for publication or commercial use. Nomenclature SSTO Single Stage To Orbit REL Reaction Engines Ltd UK United Kingdom LEO Low Earth Orbit SABRE Synergetic Air-Breathing Rocket Engine SOMA SKYLON Orbital Maneuvering Assembly HOTOL Horizontal Take-O↵and Landing NASP National Aerospace Program GT OW Gross Take-O↵Weight MECO Main Engine Cut-O↵ LACE Liquid Air Cooled Engine RCS Reaction Control System MLI Multi-Layer Insulation mT Tonne I. Introduction The SKYLON spaceplane is a single stage to orbit concept vehicle being developed by Reaction Engines Ltd in the United Kingdom. It is designed to take o↵and land on a runway delivering 15 mT of payload into LEO, in the current D-1 configuration. -

Recommended Practices for Human Space Flight Occupant Safety
Recommended Practices for Human Space Flight Occupant Safety Version 1.0 August 27, 2014 Federal Aviation Administration Office of Commercial Space Transportation 800 Independence Avenue, Room 331 7 3 Washington, DC 20591 0 0 - 4 1 C T Recommended Practices for Human Space Flight Page ii Occupant Safety – Version 1.0 Record of Revisions Version Description Date 1.0 Baseline version of document August 27, 2014 Recommended Practices for Human Space Flight Page iii Occupant Safety – Version 1.0 Recommended Practices for Human Space Flight Page iv Occupant Safety – Version 1.0 TABLE OF CONTENTS A. INTRODUCTION ............................................................................................................... 1 1.0 Purpose ............................................................................................................................. 1 2.0 Scope ................................................................................................................................ 1 3.0 Development Process ....................................................................................................... 2 4.0 Level of Risk and Level of Care ...................................................................................... 2 4.1 Level of Risk ................................................................................................................ 2 4.2 Level of Care ................................................................................................................ 3 5.0 Structure and Nature of the -
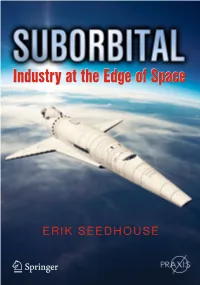
Industry at the Edge of Space Other Springer-Praxis Books of Related Interest by Erik Seedhouse
IndustryIndustry atat thethe EdgeEdge ofof SpaceSpace ERIK SEEDHOUSE S u b o r b i t a l Industry at the Edge of Space Other Springer-Praxis books of related interest by Erik Seedhouse Tourists in Space: A Practical Guide 2008 ISBN: 978-0-387-74643-2 Lunar Outpost: The Challenges of Establishing a Human Settlement on the Moon 2008 ISBN: 978-0-387-09746-6 Martian Outpost: The Challenges of Establishing a Human Settlement on Mars 2009 ISBN: 978-0-387-98190-1 The New Space Race: China vs. the United States 2009 ISBN: 978-1-4419-0879-7 Prepare for Launch: The Astronaut Training Process 2010 ISBN: 978-1-4419-1349-4 Ocean Outpost: The Future of Humans Living Underwater 2010 ISBN: 978-1-4419-6356-7 Trailblazing Medicine: Sustaining Explorers During Interplanetary Missions 2011 ISBN: 978-1-4419-7828-8 Interplanetary Outpost: The Human and Technological Challenges of Exploring the Outer Planets 2012 ISBN: 978-1-4419-9747-0 Astronauts for Hire: The Emergence of a Commercial Astronaut Corps 2012 ISBN: 978-1-4614-0519-1 Pulling G: Human Responses to High and Low Gravity 2013 ISBN: 978-1-4614-3029-2 SpaceX: Making Commercial Spacefl ight a Reality 2013 ISBN: 978-1-4614-5513-4 E r i k S e e d h o u s e Suborbital Industry at the Edge of Space Dr Erik Seedhouse, M.Med.Sc., Ph.D., FBIS Milton Ontario Canada SPRINGER-PRAXIS BOOKS IN SPACE EXPLORATION ISBN 978-3-319-03484-3 ISBN 978-3-319-03485-0 (eBook) DOI 10.1007/978-3-319-03485-0 Springer Cham Heidelberg New York Dordrecht London Library of Congress Control Number: 2013956603 © Springer International Publishing Switzerland 2014 This work is subject to copyright. -

Atlas Launch System Mission Planner's Guide, Atlas V Addendum
ATLAS Atlas Launch System Mission Planner’s Guide, Atlas V Addendum FOREWORD This Atlas V Addendum supplements the current version of the Atlas Launch System Mission Plan- ner’s Guide (AMPG) and presents the initial vehicle capabilities for the newly available Atlas V launch system. Atlas V’s multiple vehicle configurations and performance levels can provide the optimum match for a range of customer requirements at the lowest cost. The performance data are presented in sufficient detail for preliminary assessment of the Atlas V vehicle family for your missions. This guide, in combination with the AMPG, includes essential technical and programmatic data for preliminary mission planning and spacecraft design. Interface data are in sufficient detail to assess a first-order compatibility. This guide contains current information on Lockheed Martin’s plans for Atlas V launch services. It is subject to change as Atlas V development progresses, and will be revised peri- odically. Potential users of Atlas V launch service are encouraged to contact the offices listed below to obtain the latest technical and program status information for the Atlas V development. For technical and business development inquiries, contact: COMMERCIAL BUSINESS U.S. GOVERNMENT INQUIRIES BUSINESS INQUIRIES Telephone: (691) 645-6400 Telephone: (303) 977-5250 Fax: (619) 645-6500 Fax: (303) 971-2472 Postal Address: Postal Address: International Launch Services, Inc. Commercial Launch Services, Inc. P.O. Box 124670 P.O. Box 179 San Diego, CA 92112-4670 Denver, CO 80201 Street Address: Street Address: International Launch Services, Inc. Commercial Launch Services, Inc. 101 West Broadway P.O. Box 179 Suite 2000 MS DC1400 San Diego, CA 92101 12999 Deer Creek Canyon Road Littleton, CO 80127-5146 A current version of this document can be found, in electronic form, on the Internet at: http://www.ilslaunch.com ii ATLAS LAUNCH SYSTEM MISSION PLANNER’S GUIDE ATLAS V ADDENDUM (AVMPG) REVISIONS Revision Date Rev No. -
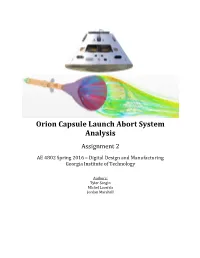
Orion Capsule Launch Abort System Analysis
Orion Capsule Launch Abort System Analysis Assignment 2 AE 4802 Spring 2016 – Digital Design and Manufacturing Georgia Institute of Technology Authors: Tyler Scogin Michel Lacerda Jordan Marshall Table of Contents 1. Introduction ......................................................................................................................................... 4 1.1 Mission Profile ............................................................................................................................. 7 1.2 Literature Review ........................................................................................................................ 8 2. Conceptual Design ............................................................................................................................. 13 2.1 Design Process ........................................................................................................................... 13 2.2 Vehicle Performance Characteristics ......................................................................................... 15 2.3 Vehicle/Sub-Component Sizing ................................................................................................. 15 3. Vehicle 3D Model in CATIA ................................................................................................................ 22 3.1 3D Modeling Roles and Responsibilities: .................................................................................. 22 3.2 Design Parameters and Relations:............................................................................................ -

Initial Investigation of Reaction Control System Design on Spacecraft Handling Qualities for Earth Orbit Docking
Initial Investigation of Reaction Control System Design on Spacecraft Handling Qualities for Earth Orbit Docking Randall E. Bailey1 E. Bruce Jackson,2 and Kenneth H. Goodrich 3 NASA Langley Research Center, Hampton, Virginia, 23681 W. Al Ragsdale4, and Jason Neuhaus 5 Unisys Corporation, Hampton, VA, 23681 and Jim Barnes6 ARINC, Hampton, VA, 23666 A program of research, development, test, and evaluation is planned for the development of Spacecraft Handling Qualities guidelines. In this first experiment, the effects of Reaction Control System design characteristics and rotational control laws were evaluated during simulated proximity operations and docking. Also, the influence of piloting demands resulting from varying closure rates was assessed. The pilot-in-the-loop simulation results showed that significantly different spacecraft handling qualities result from the design of the Reaction Control System. In particular, cross-coupling between translational and rotational motions significantly affected handling qualities as reflected by Cooper-Harper pilot ratings and pilot workload, as reflected by Task-Load Index ratings. This influence is masked – but only slightly – by the rotational control system mode. While rotational control augmentation using Rate Command Attitude Hold can reduce the workload (principally, physical workload) created by cross-coupling, the handling qualities are not significantly improved. The attitude and rate deadbands of the RCAH introduced significant mental workload and control compensation to evaluate when deadband firings would occur, assess their impact on docking performance, and apply control inputs to mitigate that impact. I. Introduction Handling qualities embody “those qualities or characteristics of an aircraft that govern the ease and precision with which a pilot is able to perform the tasks required in support of an aircraft role."1 These same qualities are as critical, if not more so, in the operation of spacecraft. -

Chapter 4: Environmental Consequences of Alternatives
Final Constellation Programmatic Environmental Impact Statement 4. ENVIRONMENTAL CONSEQUENCES OF ALTERNATIVES The potential environmental consequences of both the National Aeronautics and Space Administration’s (NASA) Proposed Action (Preferred Alternative) to continue preparations for and to implement the Constellation Program, and the No Action Alternative, not continue preparations for nor implement the Constellation Program, are summarized in Chapter 2 and are presented in detail in this Chapter. In addition, this Chapter presents in Cumulative Impacts (see Section 4.3) the potential environmental consequences of two overlapping but individual NASA actions: implementing the Constellation Program and close-out of the Space Shuttle Program. 4.1 ENVIRONMENTAL IMPACTS OF THE PROPOSED ACTION (PREFERRED ALTERNATIVE) Under the Proposed Action, NASA would continue preparations for and implement the Constellation Program. This Program would involve activities at many U.S. Government and commercial facilities. Although detailed aspects of the Constellation Program and the full scope of the activities that might occur at each facility are not fully known, the activities described in Section 2.1 present enough information to broadly estimate the nature of the potential environmental impacts that might occur if NASA implements the Proposed Action. Figure 2-2 presents a high-level summary of the major Constellation Program activities that would be expected to occur at each of the primary U.S. Government facilities, as well as commercial facilities with the potential for significant environmental impacts. Given the long-term nature of the Constellation Program, and NASA’s desire to utilize as much of the Space Shuttle Program infrastructure as practicable, it is expected that over time, many of the existing facilities currently used by the Space Shuttle Program and planned to be used for the Constellation Program would require maintenance, upgrading, renovation, and/or replacement. -

Merritt Island National Wildlife Refuge
Merritt Island National Wildlife Refuge Comprehensive Conservation Plan U.S. Department of the Interior Fish and Wildlife Service Southeast Region August 2008 COMPREHENSIVE CONSERVATION PLAN MERRITT ISLAND NATIONAL WILDLIFE REFUGE Brevard and Volusia Counties, Florida U.S. Department of the Interior Fish and Wildlife Service Southeast Region Atlanta, Georgia August 2008 TABLE OF CONTENTS COMPREHENSIVE CONSERVATION PLAN EXECUTIVE SUMMARY ....................................................................................................................... 1 I. BACKGROUND ................................................................................................................................. 3 Introduction ................................................................................................................................... 3 Purpose and Need for the Plan .................................................................................................... 3 U.S. Fish And Wildlife Service ...................................................................................................... 4 National Wildlife Refuge System .................................................................................................. 4 Legal Policy Context ..................................................................................................................... 5 National Conservation Plans and Initiatives .................................................................................6 Relationship to State Partners .....................................................................................................