Using the Smart Grid Lab to Test a Power Oscillation Damping Controller for Modular Multilevel Converters
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Interconnector Services
Interconnector Services Industry Challenges OUR SERVICES AT A GLANCE The electricity sector around the world is undergoing significant changes, often driven by the decarbonisation Interconnector policy and regulation agenda. For most countries, however, security of supply • Design of regulatory regimes remains the number one priority. At the same time, (including Cap and Floor in consumer price also remains a key issue. Interconnectors Great Britain) are uniquely well placed to meet these challenges of • Policy design (e.g. incentives to sustainability, security and affordability. increase interconnection) Interconnectors are unique transmission • Energy market design (e.g. design assets that enable the flow of electricity of capacity market to incorporate interconnectors) over high voltage cables between different NorthConnect countries or regions. The economic Icelink rationale for interconnectors is driven by Quantitative analysis fundamental differences in the generation mixes in the connecting countries which • Power market fundamentals lead to systematic electricity price NSN modelling spreads over long periods of time. For • Cost-benefit analysis (e.g. example, the generation portfolio in Moyle Viking arbitrage revenues, Capacity Great Britain (primarily thermal and Greenwire Market, ancillary services) renewable generation, with some nuclear) Greenlink BritNed is very different from that in France • Socio-economic impact analysis East-West (predominantly nuclear) or Norway Nemo • Financial analysis (e.g. to support (predominantly hydro). This is beneficial to IFA2 IFA FABLink ElecLink investment decisions) consumers as it allows cheaper electricity Aquind to be imported at times of high local prices and to generators as it allows surplus Strategic support generation to be exported at times of low • Advising on negotiations with Currently operational local prices. -
Total Length = Approximately 760 Km 1400 MW (1.4 GW) Capacity Operational in 2022
Welcome to Viking Link Viking Link is a proposed 1400 MW high voltage direct current (DC) electricity link between the British and Danish transmission systems connecting at Bicker Fen substation in Lincolnshire and Revsing in southern Jutland, Denmark. Viking Link will allow electricity to be exchanged between Great Britain and Denmark. Total length = approximately 760 km 1400 MW (1.4 GW) capacity Operational in 2022 GB GB The project is being jointly developed between National Grid Viking Link Limited and Energinet.dk. National Grid Viking Link Limited (NGVL) is a wholly owned subsidiary of National Grid Group and is legally separate from National Grid Electricity Transmission Plc (NGET) which has the licence to own and operate the high voltage electricity transmission system in England and Wales. Energinet.dk is an independent public enterprise owned by the Danish state as represented by the Ministry of Energy, Utilities and Climate. It owns, operates and develops the Danish electricity and gas transmission systems. CONTACT US e [email protected] t 0800 731 0561 w www.viking-link.com Why we are here Thank you for coming to this public consultation event about our proposals for Viking Link. The project is at an early stage and the impact of any proposals on local people and the environment will be carefully considered as we develop our project. We intend to apply for planning permission for the British onshore works through the local planning process and we will consult and listen carefully to local communities as we develop our plans. Today we would like to introduce the project and explain what we want to build. -
For Hydropower
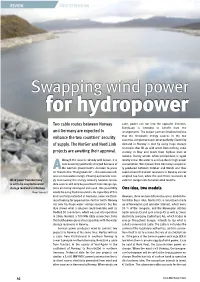
REVIEW GRID EXTENSION Swapping wind power for hydropower Two cable routes between Norway calm, power can run into the opposite direction. Everybody is intended to benefit from the and Germany are expected to arrangements. The project partners involved believe enhance the two countries’ security that the renewable energy sources in the two countries complement each other perfectly. Electricity of supply. The NorGer and Nord.Link demand in Norway is met by using huge storage reservoirs that fill up with water from melting snow projects are awaiting their approval. starting in May and reach their highest level in autumn. During winter, when precipitation is again lthough the issue is already well known, it is mostly snow, the water is used up due to high power now becoming politically charged because of consumption. Wind power from Germany is especial Athe German government’s decision to press ly produced between October and March and thus on towards the “Energiewende” – the exclusive reli could ensure that water reservoirs in Norway are not ance on renewable energy. Phasing out nuclear ener emptied too fast, while the well filled reservoirs in Wind power from Germany gy and moving the energy industry towards renew summer compensate for weak wind months. is set to be coupled to water able sources will only be possible if new storage sys storage reservoirs in Norway. tems are being developed and used. One possibility One idea, two models Photo: Statnett SF would be using hydro reservoirs. As capacities of this kind are fairly restricted in Germany, some are think However, there are two different business models be ing of looking for opportunities farther north: Norway hind this basic idea. -

Expert Perspectives on Norway's Energy Future
Research Paper Antony Froggatt, Paul Stevens and Siân Bradley Edited by Germana Canzi and Amanda Burton Energy, Environment and Resources Programme | June 2020 Expert Perspectives on Norway’s Energy Future Future on Norway’s Energy Expert Perspectives Expert Perspectives on Norway’s Energy Future Froggatt, Stevens and Bradley Stevens Froggatt, Chatham House Contents Abbreviations 2 Summary 3 1 Preamble: Energy Transition in a Post-COVID-19 World 5 2 Challenges and Opportunities for Norway 8 3 Norway’s Energy Future 13 4 Conclusions and Recommendations 38 Annex: Expert Perspectives 40 About the Editors 90 About the Interviewees 91 About the Authors 95 Acknowledgments 96 1 | Chatham House Expert Perspectives on Norway’s Energy Future Abbreviations CCS carbon capture and storage CCU carbon capture and use CCUS carbon capture, use and storage COP Conference of the Parties EIA Energy Information Administration EV electric vehicle GHG greenhouse gas GtCO2e gigatonnes of carbon dioxide equivalent IEA International Energy Agency IPCC International Panel on Climate Change LUC land-use change mtoe million tonnes of oil equivalent NETs negative emissions technologies SAF sustainable aviation fuels SMR steam methane reformer SWF sovereign wealth fund UNEP United Nations Environment Programme UNFCCC United Nations Framework Convention on Climate Change 2 | Chatham House Expert Perspectives on Norway’s Energy Future Summary • The world is undergoing a transition away from fossil fuels towards renewable energy. However, the speed and depth of this transition is uncertain and controversial. This will have significant implications for Norway, one of the world’s largest exporters of both energy and capital. • With international efforts to limit increases in global temperature to 2°C, and as close as possible to 1.5°C, appearing increasingly off-track, there is an urgent need for a rapid move away from the unabated use of fossil fuels. -

Requirements for Interconnection of HVDC Links with DC-DC Converters
Requirements for interconnection of HVDC links with DC-DC converters Daniel Gomez A., Juan Paez, Marc Cheah-Mane, Jose Maneiro, Piotr Dworakowski, Oriol Gomis-Bellmunt, Florent Morel To cite this version: Daniel Gomez A., Juan Paez, Marc Cheah-Mane, Jose Maneiro, Piotr Dworakowski, et al.. Re- quirements for interconnection of HVDC links with DC-DC converters. IECON 2019 - 45th Annual Conference of the IEEE Industrial Electronics Society, Oct 2019, Lisbon, Portugal. pp.4854-4860, 10.1109/IECON.2019.8927640. hal-02432353 HAL Id: hal-02432353 https://hal.archives-ouvertes.fr/hal-02432353 Submitted on 8 Jan 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Requirements for interconnection of HVDC links with DC-DC converters Daniel Gómez A. Juan D. Páez Marc Cheah-Mane Jose Maneiro SuperGrid Institute SuperGrid Institute CITCEA-UPC SuperGrid Institute Villeurbanne, France Villeurbanne, France Barcelona, Spain Villeurbanne, France https://orcid.org/0000-0002- https://orcid.org/0000-0002- https://orcid.org/0000-0002- https://orcid.org/0000-0002- 5647-0488 8712-3630 0942-661X 5717-6176 Piotr Dworakowski Oriol Gomis-Bellmunt Florent Morel SuperGrid Institute CITCEA-UPC SuperGrid Institute Villeurbanne, France Barcelona, Spain Villeurbanne, France https://orcid.org/0000-0002- https://orcid.org/0000-0002- https://orcid.org/0000-0003- 6893-0103 9507-8278 3098-7806 Abstract— The number of high voltage direct current (HVDC) links continue to increase over the years, most of them, for offshore applications or bulk power transmission over long distances. -

Interconnectors
Connecting for a smarter future How interconnectors are making energy better for consumers Benefiting customers today Stronger links for and tomorrow a smarter future Interconnectors are making energy more secure, affordable Interconnectors are transmission cables that allow and sustainable for consumers across Great Britain (GB) electricity to flow freely between markets. They are at and Europe. And they are set to deliver much more. the heart of the transition to a smarter energy system. Tomorrow’s energy will be cleaner, more flexible and more responsive to the individual needs of consumers. To efficiently deliver the energy system of tomorrow, European countries are working together to maximise the potential of technologies £3 billion investment like battery storage, wind and solar power. Interconnectors Since 2014, over £3 billion has been invested in 4.4 GW of new enable smarter energy systems to react quickly to changes interconnector capacity, which will more than double the existing in supply and demand, ensuring renewable energy flows capacity between GB and continental Europe by the early 2020s. from where it is being generated in large quantities, to where it is needed most. Consumers benefit from interconnectors because they open the door to cheaper energy sources and Power for 11 million homes help GB build a smarter energy system. 4.4 GW of capacity provides access to enough electricity to power National Grid recognises 11 million homes. While the future relationship between GB and the EU the challenges that remains unclear, we are confident that we will continue Brexit poses. However, to trade electricity across interconnectors. It is in the best interests of all consumers for GB to keep working closely we remain confident 9.5 GW more that trade in electricity There is potential to increase the benefits to consumers through a with the EU to build an energy system that makes the best further 9.5 GW of interconnectors that will help deliver a smarter, more use of all our energy resources. -

The Scottish Marine Protected Area Project – Developing the Evidence Base for Impact Assessments and the Sustainability Appraisal Final Report
Planning Scotland’s Seas The Scottish Marine Protected Area Project – Developing the Evidence Base for Impact Assessments and the Sustainability Appraisal Final Report Marine Scotland The Scottish Marine Protected Area Project – Developing the Evidence Base for Impact Assessments and the Sustainability Appraisal Final Report Date: July 2013 Project Ref: R/4136/1 Report No: R.2097 © ABP Marine Environmental Research Ltd Version Details of Change Date 1.0 Draft 29.04.2013 2.0 Draft 15.05.2013 3.0 Final 07.06.2013 4.0 Final 28.06.2013 5.0 Final 01.07.2013 6.0 Final 05.07.2013 Document Authorisation Signature Date Project Manager: S F Walmsley PP 05.07.2013 Quality Manager: C E Brown 05.07.2013 Project Director: S C Hull 05.07.2013 ABP Marine Environmental Research Ltd ABPmer is certified by: Quayside Suite, Medina Chambers, Town Quay, Southampton, Hampshire SO14 2AQ Tel: +44 (0) 23 8071 1840 Fax: +44 (0) 23 8071 1841 Web: www.abpmer.co.uk Email: [email protected] All images copyright ABPmer apart from front cover (wave, anemone, bird) and policy & management (rockpool) Andy Pearson www.oceansedgepzhotography.co.uk The Scottish Marine Protected Area Project – Developing the Evidence Base for Impact Assessments and the Sustainability Appraisal Summary Introduction The Marine (Scotland) Act and the UK Marine and Coastal Access Act contain provisions for the designation of a network of Marine Protected Areas (MPAs) in Scottish territorial and offshore waters in order to protect marine biodiversity and geodiversity and contribute to a UK and international network of MPAs. -

UK Onshore Scheme Statement of Community Involvement
UK Onshore Scheme Statement of Community Involvement VKL-08-39-G500-028 August 2017 © National Grid Viking Link Limited 2017. The reproduction or transmission of all or part of this report without the written permission of the owner, is prohibited and the commission of any unauthorised act in relation to the report may result in civil or criminal actions. National Grid Viking Link Limited will not be liable for any use which is made of opinions or views expressed within it. Contents 1 EXECUTIVE SUMMARY ............................................................................................ 1 2 INTRODUCTION ........................................................................................................ 1 2.1 Scope of this document ................................................................................................................. 1 2.2 Structure of the report .................................................................................................................... 2 2.3 Project Overview ........................................................................................................................... 3 3 THE PLANNING PROCESS ...................................................................................... 6 3.1 Introduction ................................................................................................................................... 6 3.2 Onshore consents and permits ..................................................................................................... -

The Norned Hvdc Link – Cable Design and Performance
ReturnClose and to SessionReturn THE NORNED HVDC LINK – CABLE DESIGN AND PERFORMANCE Thomas WORZYK, ABB Power Systems, Sweden, [email protected] Mats SJÖBERG, ABB Power Systems, Sweden, [email protected] Jan-Erik SKOG, Statnett, Norway, [email protected] Kees KOREMAN, TenneT, The Netherlands, [email protected] ABSTRACT The NorNed link is the longest submarine power cable +450 kV system ever with a distance of 580 km. The bipolar HVDC DC-cable system with ± 450 kV dc represents the state-of-the-art of “classic” HVDC technology while modern production and installation technology helped to push forward the limit of Eemshaven -450 kV Feda HVDC power transmission. This paper describes some of the characteristics of the power cables in the NorNed link. Figure 1. NorNed main circuit configuration KEYWORDS NorNed, HVDC, mass-impregnated cable, submarine cable. CABLE ROUTE INTRODUCTION The challenging cable route includes the following components: The cables for NorNed were supplied by two manufacturers. o Trenched land cable in the Netherlands Technical data given in this paper relate to the cables o Submarine cable in the tidal flats off the Netherlands, supplied from one manufacturer for approx. 70% of the with strict environmental installation requirements, and cable route. risks of moving sands changing the thermal cable ambient o Long portions of flat sea bottom with boulder fields with NORNED HVDC CABLE LINK water depth <100 m The NorNed link connects the Dutch to the Norwegian o The Norwegian trench with up to 400 m of water national power grid. Since these grids belong to different o Steep tunnels in Norway power frequency control areas in Europe (UCPTE and Nordel, resp.) they are asynchronous. -
 XXX Draft](https://docslib.b-cdn.net/cover/6742/brussels-xxx-2013-xxx-draft-1166742.webp)
Brussels, XXX […](2013) XXX Draft
EUROPEAN COMMISSION Brussels, XXX […](2013) XXX draft COMMISSION OPINION of XXX pursuant to Article 3(1) of Regulation (EC) No 714/2009 and Article 10(6) of Directive 2009/72/EC – the Netherlands - Certification of TenneT TSO B.V. EN EN COMMISSION OPINION of XXX pursuant to Article 3(1) of Regulation (EC) No 714/2009 and Article 10(6) of Directive 2009/72/EC – the Netherlands - Certification of TenneT TSO B.V. I. PROCEDURE On 3 May 2013 the Commission received a preliminary decision from the Dutch regulatory authority (hereafter, "ACM") on the certification of TenneT TSO B.V. (hereafter "TenneT") as Transmission System Operator (TSO) for electricity, in accordance with Article 10(6) of Directive 2009/72/EC1 (hereafter, "Electricity Directive"). Pursuant to Article 3(1) Regulation (EC) No 714/20092 (hereafter, "Electricity Regulation"), the Commission is required to examine the notified draft decision and deliver an opinion to the relevant national regulatory authority as to its compatibility with Article 10(2) and Article 9 of the Electricity Directive. II. DESCRIPTION OF THE NOTIFIED DECISION TenneT is the owner and operator of the entire Dutch onshore electricity transmission grid. It also co-owns and co-operates with its Norwegian counterpart Statnett the subsea NorNed- cable, a 700 MW interconnector connecting the Netherlands to Norway. The request for certification hence also includes the southern half of the NorNed-cable. TenneT Holding, the mother company of TenneT, is also the owner of TenneT Germany, a German TSO following a separate certification procedure in Germany. TenneTs shares are ultimately wholly owned by the Dutch state. -

Scottish Government Arctic Policy: Mapping Report Jafry, Tahseen; Mikulewicz, Michael; Mattar, Sennan; Davidson, Magnus; Bremner, Barbara
Scottish Government Arctic Policy: Mapping Report Jafry, Tahseen; Mikulewicz, Michael; Mattar, Sennan; Davidson, Magnus; Bremner, Barbara Publication date: 2019 Document Version Publisher's PDF, also known as Version of record Link to publication in ResearchOnline Citation for published version (Harvard): Jafry, T, Mikulewicz, M, Mattar, S, Davidson, M & Bremner, B 2019, Scottish Government Arctic Policy: Mapping Report. Scottish Government. General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Take down policy If you believe that this document breaches copyright please view our takedown policy at https://edshare.gcu.ac.uk/id/eprint/5179 for details of how to contact us. Download date: 01. Oct. 2021 SCOTTISH GOVERNMENT ARCTIC POLICY MAPPING REPORT Compiled by Professor Tahseen Jafry Centre for Climate Justice Glasgow Caledonian University Project Team Dr Michael Mikulewicz and Sennan Mattar GCU Centre for Climate Justice Magnus Davidson and Barbara Bremner Environmental Research Institute, University of the Highlands and Islands June 2019 compiled in November 2018 Table of Contents 1. EXECUTIVE SUMMARY ........................................................................................................ 5 Context and background ........................................................................................................... -

Integration of Electricity Markets
Norwegian School of Economics Bergen, Autumn 2018 Integration of Electricity Markets An Analysis of TSO-Owned and Non-TSO-Owned Cross-Border Interconnectors Sofie Handal Bruvik & Sigrid Marthea Hernes Supervisor: Lassi Ahlvik Master Thesis within the profile of Economics and the profile of Energy, Natural Resources and the Environment NORWEGIAN SCHOOL OF ECONOMICS This thesis was written as a part of the Master of Science in Economics and Business Administration at NHH. Please note that neither the institution nor the examiners are responsible - through the approval of this thesis - for the theories and methods used, or results and conclusions drawn in this work. Abstract The European electricity market is gradually becoming more integrated due to increased cross- border transmission capacity. Integrated electricity markets are expected to improve social welfare through security of supply and efficient electricity generation. Thus, inadequate cross- border transmission capacity causes an inefficient allocation of resources at a regional level. The integration of electricity markets will impact electricity prices and the social welfare in the connected regions. A cross-border interconnector between the bidding zone NO5 in Norway and the market area Great Britain will exploit the different price levels and structures of the regions. The interconnector is expected to increase electricity prices in NO5 and decrease electricity prices in Great Britain. Further, the social welfare is expected to increase in both NO5 and Great Britain. This thesis estimates the annual congestion rent of a 1 400 MW interconnector between NO5 and Great Britain. The Norwegian share of the congestion rent is estimated to vary between e51,4 million and e168,4 million in the period from 2026 to 2045.