Arxiv:2012.09431V1 [Astro-Ph.EP] 17 Dec 2020 Ol Xli H Lntsaig Hswr a Ae Ntepyiso Physics the on Based Was Work This Spacing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
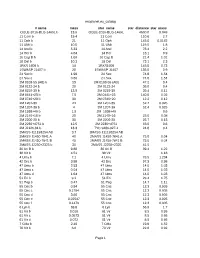
Exoplanet.Eu Catalog Page 1 # Name Mass Star Name
exoplanet.eu_catalog # name mass star_name star_distance star_mass OGLE-2016-BLG-1469L b 13.6 OGLE-2016-BLG-1469L 4500.0 0.048 11 Com b 19.4 11 Com 110.6 2.7 11 Oph b 21 11 Oph 145.0 0.0162 11 UMi b 10.5 11 UMi 119.5 1.8 14 And b 5.33 14 And 76.4 2.2 14 Her b 4.64 14 Her 18.1 0.9 16 Cyg B b 1.68 16 Cyg B 21.4 1.01 18 Del b 10.3 18 Del 73.1 2.3 1RXS 1609 b 14 1RXS1609 145.0 0.73 1SWASP J1407 b 20 1SWASP J1407 133.0 0.9 24 Sex b 1.99 24 Sex 74.8 1.54 24 Sex c 0.86 24 Sex 74.8 1.54 2M 0103-55 (AB) b 13 2M 0103-55 (AB) 47.2 0.4 2M 0122-24 b 20 2M 0122-24 36.0 0.4 2M 0219-39 b 13.9 2M 0219-39 39.4 0.11 2M 0441+23 b 7.5 2M 0441+23 140.0 0.02 2M 0746+20 b 30 2M 0746+20 12.2 0.12 2M 1207-39 24 2M 1207-39 52.4 0.025 2M 1207-39 b 4 2M 1207-39 52.4 0.025 2M 1938+46 b 1.9 2M 1938+46 0.6 2M 2140+16 b 20 2M 2140+16 25.0 0.08 2M 2206-20 b 30 2M 2206-20 26.7 0.13 2M 2236+4751 b 12.5 2M 2236+4751 63.0 0.6 2M J2126-81 b 13.3 TYC 9486-927-1 24.8 0.4 2MASS J11193254 AB 3.7 2MASS J11193254 AB 2MASS J1450-7841 A 40 2MASS J1450-7841 A 75.0 0.04 2MASS J1450-7841 B 40 2MASS J1450-7841 B 75.0 0.04 2MASS J2250+2325 b 30 2MASS J2250+2325 41.5 30 Ari B b 9.88 30 Ari B 39.4 1.22 38 Vir b 4.51 38 Vir 1.18 4 Uma b 7.1 4 Uma 78.5 1.234 42 Dra b 3.88 42 Dra 97.3 0.98 47 Uma b 2.53 47 Uma 14.0 1.03 47 Uma c 0.54 47 Uma 14.0 1.03 47 Uma d 1.64 47 Uma 14.0 1.03 51 Eri b 9.1 51 Eri 29.4 1.75 51 Peg b 0.47 51 Peg 14.7 1.11 55 Cnc b 0.84 55 Cnc 12.3 0.905 55 Cnc c 0.1784 55 Cnc 12.3 0.905 55 Cnc d 3.86 55 Cnc 12.3 0.905 55 Cnc e 0.02547 55 Cnc 12.3 0.905 55 Cnc f 0.1479 55 -
What Can the Dispersed Matter Planet Project Do for ARIEL?
What can the Dispersed Matter Planet Project do for ARIEL? Carole Haswell, The Open University Principal Collaborators: Dan Staab, John Barnes, Luca Fossati, MarK Jones, GuilleM Angelada-Escude, JaMes Doherty, Joe Cooper, JaMes Jenkins Outline • motivation: WASP-12: stellar activity masked by planetary mass loss new way to select host stars of ablating planets • Dispersed Matter Planet Project (DMPP) Search for Them among BRIGHT NEARBY STARS! Very efficient RV planet search 39 initial targets, good success rate • First discoveries DMPP-1, DMPP-2, DMPP-3 … • Characterisation of DMPP planets mass-radius-composition relationships, exogeology • DMPP systems good for characterisation even if not transiting… Activity: characterised by RHK Line core Emission strength Fossati, Ayres, Haswell, Bohlender, Kochukhov & Floer 2013, ApJLett Ca II H& K line cores Activity: characterised by RHK Line core emission quenched by diffuse gas Dan Staab PhD work Haswell, Staab, Barnes, Anglada-Escude, Fossati, Jenkins, Norton, Doherty, Cooper 2019, Nature Astronomy arXiv:1912.10874 Activity: characterised by RHK > 40% of close-in planet hosts: depressed CaII H&K OU-SALT survey Doherty, Haswell, Barnes, Staab, Fossati 2018, Poster Cool Stars 20; 2019 in prep Staab, Haswell, Smith, Fossati, Barnes, Busuttil, Jenkins, MNRAS, 2017, 466, 738 Absorbing gas constrained to orbital plane? Haswell, Fossati, Ayres, France, Froning et al 2012, ApJ, 760, 79 Mass-losing Close-in planets e.g. Kepler 1520b have HUGE sCale-heights KIC 1255b aka Kepler 1520b: • DeteCted by transiting -
Institute of Astrophysics and Space Sciences 2018 Activity Report
Institute of Astrophysics and Space Sciences 2018 Activity Report Institute of Astrophysics and Space Sciences 2018 Activity Report COFINANCIAMENTO 2018 IA ACTIVITY REPORT | 3 Index Unit Overview 5 IA Management 6 Visitor Program at the Institute for Astrophysics and Space Sciences 7 Incentive Program for the Training of Excellence of Young Researchers in Astrophysics and Space Sciences 7 IA-ON 5 8 The IA team (2018) 9 Origin and Evolution of Stars and Planets Group 9 Galaxies, Cosmology, and the Evolution of the Universe Group 10 Instrumentation and Systems Group 11 Interface to Science 11 Research Projects/Programmes 12 Projects focused on scientific activities 12 Projects focused on communication and outreach 15 Scientific Output and Activities 16 Origin and Evolution of Stars and Planets 20 Towards the detection and characterisation of other Earths 21 Towards a comprehensive study of stars 25 Galaxies, Cosmology, and the Evolution of the Universe 30 The assembly history of galaxies resolved in space and time 32 Unveiling the dynamics of the Universe 36 Instrumentation and Systems 39 Space and Ground Systems and Technologies 45 Science Communication 47 The Portuguese ALMA Centre of Expertise 50 Scientific Output 53 Books 53 Published articles 53 Book chapters and Proceedings 59 Book chapters and Proceedings 59 International Scientific Communications 61 National Scientific Communications 65 Organization of Conferences 55 Seminars at IA 66 Organization of Conferences 67 Observing runs 67 Outreach talks 69 4 | IA ACTIVITY REPORT 2018 Reports 72 External seminars by IA researchers 72 PhD completed 73 MSc Projects completed 74 BSc Traineeships/Projects completed 74 2018 IA ACTIVITY REPORT | 5 Unit Overview The Instituto de Astrofísica e Ciências do Espaço (IA) is the reference institution for research in Astronomy, Astrophysics and Space Sciences in Portugal, implementing a bold strategy for the development of this area in the country. -

A Naprendszer-Hasonlósági Index
Szegedi Tudományegyetem Természettudományi és Informatikai Kar Kísérleti Fizikai Tanszék Szakdolgozat A Naprendszer-hasonlósági index Készítette: Mészáros Richárd Fizika BSc szakos hallgató Témavezető: Dr. Szatmáry Károly egyetemi tanár Szeged 2020 Tartalomjegyzék 1. Bevezetés……………………………………………………………………..2 2. Az exobolygók felfedezési módszerei………………………………………..2 2.1. Közvetlen módszerek………………………………………………..2 2.2. Közvetett módszerek………………………………………..……….3 3. Az exobolygók osztályozása………………………………………...……….6 4. A Föld-hasonlósági index…………………………………………………….7 5. A Naprendszer-hasonlósági index……………………………………………8 5.1. Első verzió……………………………………………….…………..8 5.2. Második verzió……………………………………………………..11 5.3. Eredmények……………………………………………………...…13 6. Összefoglalás………………………………………………………………..24 Köszönetnyilvánítás……………………………………………………………24 Irodalomjegyzék………………………………………………………………..25 1 1. Bevezetés A felfedezett exobolygók asztrobiológiai potenciáljának vizsgálatára 2011-ben bevezetésre került a Föld-hasonlósági index (ESI, Schulze-Makuch et al. 2011,[2]). Dolgozatom témájául a felfedezett exobolygó rendszerek hasonló módon való vizsgálatát választottam. A második és harmadik fejezetben összefoglalom az exobolygók keresési módszereit és ezen bolygók típusait. A negyedik fejezetben röviden bemutatom a Föld-hasonlósági indexet. Az ötödik fejezetben a Föld-hasonlósági index mintájára bevezetem a Naprendszer-hasonlósági index fogalmát. Ismertetem kiszámításának módját, és alkalmazom a legalább 4 bolygót tartalmazó exobolygó rendszerekre. A kapott eredményekből -
AMD-Stability and the Classification of Planetary Systems
A&A 605, A72 (2017) DOI: 10.1051/0004-6361/201630022 Astronomy c ESO 2017 Astrophysics& AMD-stability and the classification of planetary systems? J. Laskar and A. C. Petit ASD/IMCCE, CNRS-UMR 8028, Observatoire de Paris, PSL, UPMC, 77 Avenue Denfert-Rochereau, 75014 Paris, France e-mail: [email protected] Received 7 November 2016 / Accepted 23 January 2017 ABSTRACT We present here in full detail the evolution of the angular momentum deficit (AMD) during collisions as it was described in Laskar (2000, Phys. Rev. Lett., 84, 3240). Since then, the AMD has been revealed to be a key parameter for the understanding of the outcome of planetary formation models. We define here the AMD-stability criterion that can be easily verified on a newly discovered planetary system. We show how AMD-stability can be used to establish a classification of the multiplanet systems in order to exhibit the planetary systems that are long-term stable because they are AMD-stable, and those that are AMD-unstable which then require some additional dynamical studies to conclude on their stability. The AMD-stability classification is applied to the 131 multiplanet systems from The Extrasolar Planet Encyclopaedia database for which the orbital elements are sufficiently well known. Key words. chaos – celestial mechanics – planets and satellites: dynamical evolution and stability – planets and satellites: formation – planets and satellites: general 1. Introduction motion resonances (MMR, Wisdom 1980; Deck et al. 2013; Ramos et al. 2015) could justify the Hill-type criteria, but the The increasing number of planetary systems has made it nec- results on the overlap of the MMR island are valid only for close essary to search for a possible classification of these planetary orbits and for short-term stability. -

Exoplanet.Eu Catalog Page 1 Star Distance Star Name Star Mass
exoplanet.eu_catalog star_distance star_name star_mass Planet name mass 1.3 Proxima Centauri 0.120 Proxima Cen b 0.004 1.3 alpha Cen B 0.934 alf Cen B b 0.004 2.3 WISE 0855-0714 WISE 0855-0714 6.000 2.6 Lalande 21185 0.460 Lalande 21185 b 0.012 3.2 eps Eridani 0.830 eps Eridani b 3.090 3.4 Ross 128 0.168 Ross 128 b 0.004 3.6 GJ 15 A 0.375 GJ 15 A b 0.017 3.6 YZ Cet 0.130 YZ Cet d 0.004 3.6 YZ Cet 0.130 YZ Cet c 0.003 3.6 YZ Cet 0.130 YZ Cet b 0.002 3.6 eps Ind A 0.762 eps Ind A b 2.710 3.7 tau Cet 0.783 tau Cet e 0.012 3.7 tau Cet 0.783 tau Cet f 0.012 3.7 tau Cet 0.783 tau Cet h 0.006 3.7 tau Cet 0.783 tau Cet g 0.006 3.8 GJ 273 0.290 GJ 273 b 0.009 3.8 GJ 273 0.290 GJ 273 c 0.004 3.9 Kapteyn's 0.281 Kapteyn's c 0.022 3.9 Kapteyn's 0.281 Kapteyn's b 0.015 4.3 Wolf 1061 0.250 Wolf 1061 d 0.024 4.3 Wolf 1061 0.250 Wolf 1061 c 0.011 4.3 Wolf 1061 0.250 Wolf 1061 b 0.006 4.5 GJ 687 0.413 GJ 687 b 0.058 4.5 GJ 674 0.350 GJ 674 b 0.040 4.7 GJ 876 0.334 GJ 876 b 1.938 4.7 GJ 876 0.334 GJ 876 c 0.856 4.7 GJ 876 0.334 GJ 876 e 0.045 4.7 GJ 876 0.334 GJ 876 d 0.022 4.9 GJ 832 0.450 GJ 832 b 0.689 4.9 GJ 832 0.450 GJ 832 c 0.016 5.9 GJ 570 ABC 0.802 GJ 570 D 42.500 6.0 SIMP0136+0933 SIMP0136+0933 12.700 6.1 HD 20794 0.813 HD 20794 e 0.015 6.1 HD 20794 0.813 HD 20794 d 0.011 6.1 HD 20794 0.813 HD 20794 b 0.009 6.2 GJ 581 0.310 GJ 581 b 0.050 6.2 GJ 581 0.310 GJ 581 c 0.017 6.2 GJ 581 0.310 GJ 581 e 0.006 6.5 GJ 625 0.300 GJ 625 b 0.010 6.6 HD 219134 HD 219134 h 0.280 6.6 HD 219134 HD 219134 e 0.200 6.6 HD 219134 HD 219134 d 0.067 6.6 HD 219134 HD -

Planets Galore
physicsworld.com Feature: Exoplanets Detlev van Ravenswaay/Science Photo Library Planets galore With almost 1700 planets beyond our solar system having been discovered, climatologists are beginning to sketch out what these alien worlds might look like, as David Appell reports And so you must confess Jupiters, black Jupiters or puffy Jupiters; there are David Appell is a That sky and earth and sun and all that comes to be hot Neptunes and mini-Neptunes; exo-Earths, science writer living Are not unique but rather countless examples of a super-Earths and eyeball Earths. There are planets in Salem, Oregon, class. that orbit pulsars, or dim red dwarf stars, or binary US, www. Lucretius, Roman poet and philosopher, from star systems. davidappell.com De Rerum Natura, Book II Astronomers are in heaven and planetary scien- tists have an entirely new zoo to explore. “This is the The only thing more astonishing than their diver- best time to be an exoplanetary astronomer,” says sity is their number. We’re talking exoplanets exoplanetary astronomer Jason Wright of Pennsyl- – planets around stars other than our Sun. And vania State University. “Things have really exploded they’re being discovered in Star Trek quantities: recently.” Proving the point is that a third of all 1692 as this article goes to press, and another 3845 abstracts at a recent meeting of the American Astro- unconfirmed candidates. nomical Society were related to exoplanets. The menagerie includes planets that are pink, This explosion is largely thanks to the Kepler space blue, brown or black. Some have been labelled hot observatory. -

Sistemas Exoplanetarios Múltiples
Presentado ante la Facultad de Matem´atica,Astronom´ıay F´ısica como parte de los requerimientos para obtener el t´ıtulode Licenciada en Astronom´ıade la Universidad Nacional de C´ordoba Sistemas Exoplanetarios M´ultiples Melissa Janice Hobson Directora: Mercedes G´omez Julio, 2015 Sistemas Exoplanetarios M´ultiples por Hobson, Melissa J. se distribuye bajo una Licencia Creative Commons Atribuci´on-NoComercial2.5 Argentina. Resumen Actualmente se conocen 473 sistemas exoplanetarios m´ultiples,de los cuales 51 poseen cuatro o m´asplanetas. En este trabajo, presentamos an´alisisestad´ısticosde las propiedades f´ısicastanto de las estrellas que los albergan como de los planetas que los componen, y de las configuraciones orbitales de estos sistemas. Separando los sistemas en chicos (dos o tres planetas) y grandes (cuatro o m´asplanetas), analizamos la metalicidad de las estrellas hu´espedes, agregando como un tercer grupo las estrellas que albergan Hot Jupiters. Estudiamos si los planetas est´anordenados preferentemente por tama~noen sus sistemas. Centr´andonosen los 51 sistemas m´asnumerosos, medimos la raz´onde tama~nosde los planetas y la compactez de los sistemas, y analizamos la posibilidad de una relaci´onentre estos par´ametros. Estudiamos la diversidad de los sistemas planetarios m´ultiplesactualmente conocidos en relaci´on al Sistema Solar. Investigamos las distribuciones espectrales de energ´ıade las estrellas que albergan sistemas planetarios m´ultiplesen busca de posibles discos debris1 en estos sistemas. Realizamos an´alisis comparativos de propiedades estelares y planetarias para los sistemas con y sin excesos en IR, y estimamos temperaturas y radios de los discos para los sistemas con excesos en dos o m´as filtros. -

Characterizing Exoplanet Habitability
Characterizing Exoplanet Habitability Ravi kumar Kopparapu NASA Goddard Space Flight Center Eric T. Wolf University of Colorado, Boulder Victoria S. Meadows University of Washington Habitability is a measure of an environment’s potential to support life, and a habitable exoplanet supports liquid water on its surface. However, a planet’s success in maintaining liquid water on its surface is the end result of a complex set of interactions between planetary, stellar, planetary system and even Galactic characteristics and processes, operating over the planet’s lifetime. In this chapter, we describe how we can now determine which exoplanets are most likely to be terrestrial, and the research needed to help define the habitable zone under different assumptions and planetary conditions. We then move beyond the habitable zone concept to explore a new framework that looks at far more characteristics and processes, and provide a comprehensive survey of their impacts on a planet’s ability to acquire and maintain habitability over time. We are now entering an exciting era of terrestiral exoplanet atmospheric characterization, where initial observations to characterize planetary composition and constrain atmospheres is already underway, with more powerful observing capabilities planned for the near and far future. Understanding the processes that affect the habitability of a planet will guide us in discovering habitable, and potentially inhabited, planets. There are countless suns and countless earths all rotat- have the capability to characterize the most promising plan- ing around their suns in exactly the same way as the seven ets for signs of habitability and life. We are at an exhilarat- planets of our system. -

Pricelist Abstraction (Jean-Marie Gitard (Mr STRANGE))
Artmajeur JEAN-MARIE GITARD (MR STRANGE) (FRANCE) ARTMAJEUR.COM/JEANMARIEGITARD Pricelist: Abstraction 22 Artworks Image Title Status Price Spirale For Sale $318.14 Digital Arts, 98x82x0.1 cm ©2020 Ref 13786553 artmajeur.link/l94q4U HERAKLION For Sale $365.45 Digital Arts, 75x100x0.1 cm ©2019 Ref 13659182 artmajeur.link/velV6l PHAEDRA 112 Ca For Sale $259.01 Digital Arts, 50x50x0.1 cm ©2020 Ref 13609553 artmajeur.link/zOOdl6 GLIESE 668 Cc Limited Edition For Sale $259.01 Digital Arts, 50x50x0.1 cm ©2018 Ref 13609547 artmajeur.link/tVScWB KOI-1686.01 For Sale $353.62 Digital Arts, 80x80x0.1 cm ©2018 Ref 12809219 artmajeur.link/lqEm9T 1 / 4 Image Title Status Price LHS 1723 b For Sale $353.62 Digital Arts, 100x75x0.1 cm ©2018 Ref 12809207 artmajeur.link/iEB3Ph Kepler-438 b For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2019 Ref 12300905 artmajeur.link/8D7uGT Luyten b For Sale $365.45 Digital Arts, 100x75x0.1 cm ©2019 Ref 12300896 artmajeur.link/wnZk2l Proxima Centauri b For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2017 Ref 12283532 artmajeur.link/Y8zZkd Gliese 667 Cc For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2018 Ref 12283529 artmajeur.link/LMBNRI K2-72-e For Sale $353.62 Digital Arts, 96x80x0.1 cm ©2018 Ref 12283526 artmajeur.link/FZDM29 2 / 4 Image Title Status Price TRAPPIST-1d For Sale $353.62 Digital Arts, 100x75x0.1 cm ©2018 Ref 12274691 artmajeur.link/xSVnNP Tau Ceti e For Sale $353.62 Digital Arts, 75x100x0.1 cm ©2017 Ref 12274649 artmajeur.link/DbFvHV KOI-3010.01 For Sale $341.8 Digital Arts, 82x82x0.1 cm ©2019 Ref 12274613 artmajeur.link/pGjEoY -

Determining the True Mass of Radial-Velocity Exoplanets with Gaia Nine Planet Candidates in the Brown Dwarf Or Stellar Regime and 27 Confirmed Planets? F
A&A 645, A7 (2021) Astronomy https://doi.org/10.1051/0004-6361/202039168 & © F. Kiefer et al. 2020 Astrophysics Determining the true mass of radial-velocity exoplanets with Gaia Nine planet candidates in the brown dwarf or stellar regime and 27 confirmed planets? F. Kiefer1,2, G. Hébrard1,3, A. Lecavelier des Etangs1, E. Martioli1,4, S. Dalal1, and A. Vidal-Madjar1 1 Institut d’Astrophysique de Paris, Sorbonne Université, CNRS, UMR 7095, 98 bis bd Arago, 75014 Paris, France e-mail: [email protected] 2 LESIA, Observatoire de Paris, Université PSL, CNRS, Sorbonne Université, Université de Paris, 5 place Jules Janssen, 92195 Meudon, France 3 Observatoire de Haute-Provence, CNRS, Université d’Aix-Marseille, 04870 Saint-Michel-l’Observatoire, France 4 Laboratório Nacional de Astrofísica, Rua Estados Unidos 154, 37504-364, Itajubá - MG, Brazil Received 12 August 2020 / Accepted 24 September 2020 ABSTRACT Mass is one of the most important parameters for determining the true nature of an astronomical object. Yet, many published exoplanets lack a measurement of their true mass, in particular those detected as a result of radial-velocity (RV) variations of their host star. For those examples, only the minimum mass, or m sin i, is known, owing to the insensitivity of RVs to the inclination of the detected orbit compared to the plane of the sky. The mass that is given in databases is generally that of an assumed edge-on system ( 90◦), but many ∼ other inclinations are possible, even extreme values closer to 0◦ (face-on). In such a case, the mass of the published object could be strongly underestimated by up to two orders of magnitude. -

Determining the True Mass of Radial-Velocity Exoplanets with Gaia 9 Planet Candidates in the Brown-Dwarf/Stellar Regime and 27 Confirmed Planets
Astronomy & Astrophysics manuscript no. exoplanet_mass_gaia c ESO 2020 September 30, 2020 Determining the true mass of radial-velocity exoplanets with Gaia 9 planet candidates in the brown-dwarf/stellar regime and 27 confirmed planets F. Kiefer1; 2, G. Hébrard1; 3, A. Lecavelier des Etangs1, E. Martioli1; 4, S. Dalal1, and A. Vidal-Madjar1 1 Institut d’Astrophysique de Paris, Sorbonne Université, CNRS, UMR 7095, 98 bis bd Arago, 75014 Paris, France 2 LESIA, Observatoire de Paris, Université PSL, CNRS, Sorbonne Université, Université de Paris, 5 place Jules Janssen, 92195 Meudon, France? 3 Observatoire de Haute-Provence, CNRS, Universiteé d’Aix-Marseille, 04870 Saint-Michel-l’Observatoire, France 4 Laboratório Nacional de Astrofísica, Rua Estados Unidos 154, 37504-364, Itajubá - MG, Brazil Submitted on 2020/08/20 ; Accepted for publication on 2020/09/24 ABSTRACT Mass is one of the most important parameters for determining the true nature of an astronomical object. Yet, many published exoplan- ets lack a measurement of their true mass, in particular those detected thanks to radial velocity (RV) variations of their host star. For those, only the minimum mass, or m sin i, is known, owing to the insensitivity of RVs to the inclination of the detected orbit compared to the plane-of-the-sky. The mass that is given in database is generally that of an assumed edge-on system (∼90◦), but many other inclinations are possible, even extreme values closer to 0◦ (face-on). In such case, the mass of the published object could be strongly underestimated by up to two orders of magnitude.