6 Alphaserver 2100A (BA740-B9 Enclosure) FRU Removal and Replacement 6.1 Alphaserver 2100A (BA740-B9 Enclosure) Frus
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Beyond BIOS Developing with the Unified Extensible Firmware Interface
Digital Edition Digital Editions of selected Intel Press books are in addition to and complement the printed books. Click the icon to access information on other essential books for Developers and IT Professionals Visit our website at www.intel.com/intelpress Beyond BIOS Developing with the Unified Extensible Firmware Interface Second Edition Vincent Zimmer Michael Rothman Suresh Marisetty Copyright © 2010 Intel Corporation. All rights reserved. ISBN 13 978-1-934053-29-4 This publication is designed to provide accurate and authoritative information in regard to the subject matter covered. It is sold with the understanding that the publisher is not engaged in professional services. If professional advice or other expert assistance is required, the services of a competent professional person should be sought. Intel Corporation may have patents or pending patent applications, trademarks, copyrights, or other intellectual property rights that relate to the presented subject matter. The furnishing of documents and other materials and information does not provide any license, express or implied, by estoppel or otherwise, to any such patents, trademarks, copyrights, or other intellectual property rights. Intel may make changes to specifications, product descriptions, and plans at any time, without notice. Fictitious names of companies, products, people, characters, and/or data mentioned herein are not intended to represent any real individual, company, product, or event. Intel products are not intended for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility applications. Intel, the Intel logo, Celeron, Intel Centrino, Intel NetBurst, Intel Xeon, Itanium, Pentium, MMX, and VTune are trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other countries. -

Alphaserver 4000/4100 Configuration and Installation Guide
AlphaServer 4000/4100 Configuration and Installation Guide Order Number: EK–4100A–CG. E01 This manual is for manufacturing and field personnel, and resellers who require AlphaServer 4000/4100 system drawer configuration information. Digital Equipment Corporation Maynard, Massachusetts First Printing, June 1997 Digital Equipment Corporation makes no representations that the use of its products in the manner described in this publication will not infringe on existing or future patent rights, nor do the descriptions contained in this publication imply the granting of licenses to make, use, or sell equipment or software in accordance with the description. The information in this document is subject to change without notice and should not be construed as a commitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may appear in this document. The software, if any, described in this document is furnished under a license and may be used or copied only in accordance with the terms of such license. No responsibility is assumed for the use or reliability of software or equipment that is not supplied by Digital Equipment Corporation or its affiliated companies. Copyright 1997 by Digital Equipment Corporation. All rights reserved. The following are trademarks of Digital Equipment Corporation: AlphaServer, OpenVMS, StorageWorks, VAX, and the DIGITAL logo. The following are third-party trademarks: UNIX is a registered trademark in the U.S. and other countries, licensed exclusively through X/Open Company Ltd. Windows NT is a trademark of Microsoft, Inc. All other trademarks and registered trademarks are the property of their respective holders. FCC Notice: The equipment described in this manual generates, uses, and may emit radio frequency energy. -
The Design and Verification of the Alphastation 600 5-Series Workstation by John H
The Design and Verification of the AlphaStation 600 5-series Workstation by John H. Zurawski, John E. Murray, and Paul J. Lemmon ABSTRACT The AlphaStation 600 5-series workstation is a high-performance, uniprocessor design based on the Alpha 21164 microprocessor and on the PCI bus. Six CMOS ASICs provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the I/O subsystem. The verification effort used directed, pseudorandom testing on a VERILOG software model. A hardware-based verification technique provided a test throughput that resulted in a significant improvement over software tests. This technique currently involves the use of graphics cards to emulate generic DMA devices. A PCI hardware demon is under development to further enhance the capability of the hardware-based verification. INTRODUCTION The high-performance AlphaStation 600 5-series workstation is based on the fastest Alpha microprocessor to date -- the Alpha 21164.[1] The I/O subsystem uses the 64-bit version of the Peripheral Component Interconnect (PCI) and the Extended Industry Standard Architecture (EISA) bus. The AlphaStation 600 supports three operating systems: Digital UNIX (formerly DEC OSF/1), OpenVMS, and Microsoft's Windows NT. This workstation series uses the DECchip 21171 chip set designed and built by Digital. These chips provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the PCI bus. This paper describes the architecture and features of the AlphaStation 600 5-series workstation and the DECchip 21171 chip set. The system overview is first presented, followed by a detailed discussion of the chip set. The paper then describes the cache and memory designs, detailing how the memory design evolved from the workstation's requirements. -

Software Engineering a Abnormal End: Abend Abnormaal Einde De Beëindiging Van Een Proces Voordat Dat Proces Geheel Is Afgewerkt
1 Verklarende terminologielijst voor de Software Engineering A abnormal end: abend abnormaal einde De beëindiging van een proces voordat dat proces geheel is afgewerkt. abort (to) afbreken Een proces afbreken voordat het volledig is afgewerkt. absolute address absoluut adres Een adres dat permanent aan een eenheid of geheugenplaats is toegewezen en dat de eenheid of de geheugenplaats identificeert zonder dat daarvoor een vertaling of berekening nodig is. absolute assembler absoluut assembleerprogramma Een assembleerprogramma dat uitsluitend absolute code genereert. absolute code absolute code Code waarin alle adressen absoluut zijn. absolute coding absolute codering Een coderingsmethode waarin gebruik wordt gemaakt van instructies die absolute adressen bevatten. absolute expression absolute uitdrukking Een uitdrukking voorafgaande aan het moment waarop het assembleren van een programma plaatsvindt. Dit moment wordt niet beïnvloed door het verplaatsen van het programma. Een absolute uitdrukking kan een absoluut adres in een assembleertaal weergeven. absolute instruction absolute instructie 1. Een instructie in de definitieve uitvoerbare vorm. 2. Een computerinstructie waarin alle adressen uit absolute adressen bestaan. absolute loader absoluut laadprogramma Een programma dat een ander programma in het hoofdgeheugen kan plaatsen. Dit begint bij het initiële adres dat aan de code door het assembleerprogramma of de compiler is toegewezen en dat de adressen in de code niet verder wijzigt of aanpast. absolute load module absolute laadmodule 2 Een combinatie van werkmodules die op een gespecificeerd adres in het werkgeheugen wordt uitgevoerd. absolute machine code absolute machinecode Machinecode die steeds in vaste geheugenplaatsen moet worden geladen en niet mag worden verplaatst. Dit in tegenstelling tot verplaatsbare machinecode. absolute pathname absolute padnaam Een padnaam die de informatie bevat over de wijze waarop een bestand kan worden gevonden. -

The Evolution of Econometric Software Design: a Developer's View
Journal of Economic and Social Measurement 29 (2004) 205–259 205 IOS Press The evolution of econometric software design: A developer’s view Houston H. Stokes Department of Economics, College of Business Administration, University of Illinois at Chicago, 601 South Morgan Street, Room 2103, Chicago, IL 60607-7121, USA E-mail: [email protected] In the last 30 years, changes in operating systems, computer hardware, compiler technology and the needs of research in applied econometrics have all influenced econometric software development and the environment of statistical computing. The evolution of various representative software systems, including B34S developed by the author, are used to illustrate differences in software design and the interrelation of a number of factors that influenced these choices. A list of desired econometric software features, software design goals and econometric programming language characteristics are suggested. It is stressed that there is no one “ideal” software system that will work effectively in all situations. System integration of statistical software provides a means by which capability can be leveraged. 1. Introduction 1.1. Overview The development of modern econometric software has been influenced by the changing needs of applied econometric research, the expanding capability of com- puter hardware (CPU speed, disk storage and memory), changes in the design and capability of compilers, and the availability of high-quality subroutine libraries. Soft- ware design in turn has itself impacted applied econometric research, which has seen its horizons expand rapidly in the last 30 years as new techniques of analysis became computationally possible. How some of these interrelationships have evolved over time is illustrated by a discussion of the evolution of the design and capability of the B34S Software system [55] which is contrasted to a selection of other software systems. -

HS1CP Device Channel Processor Operating Software HSOF V3.1
TM HS1CP Device Channel Processor Operating Software HSOF Version 3.1 Release Notes Order Number: EK−HS1CP−RN. E01 This document summarizes features and characteristics of the HS1CP Device Channel Processor operating software Version 3.1 that are not covered elsewhere in the documentation. These release notes also contain instructions for installing the software. _____________________________ Note____________________________ These Release Notes contain instructions for C_SWAP and HSUTIL that supersede information in the product documentation. Keep these Release Notes near your StorageWorks subsystem. ______________________________________________________________ Software Version: HSOF V3.1 Digital Equipment Corporation Maynard, Massachusetts April 1997 While Digital Equipment Corporation believes the information included in this manual is correct as of the date of publication, it is subject to change without notice. DIGITAL makes no representations that the interconnection of its products in the manner described in this document will not infringe existing or future patent rights, nor do the descriptions contained in this document imply the granting of licenses to make, use, or sell equipment or software in accordance with the description. No responsibility is assumed for the use or reliability of firmware on equipment not supplied by DIGITAL or its affiliated companies. Possession, use, or copying of the software or firmware described in this documentation is authorized only pursuant to a valid written license from DIGITAL, an authorized sublicensor, or the identified licensor. Commercial Computer Software, Computer Software Documentation and Technical Data for Commercial Items are licensed to the U.S. Government with DIGITAL’s standard commercial license and, when applicable, the rights in DFAR 252.227-7015, “Technical Data—Commercial Items.” © Digital Equipment Corporation 1997. -

Xa9846175 Indc(Nds)
XA9846175 international Atomic Energy Agency INDC(NDS)-374 Distr. G, NC I N DC INTERNATIONAL NUCLEAR DATA COMMITTEE Report on the Consultants' Meeting on CO-ORDINATION OF THE NUCLEAR REACTION DATA CENTERS (Technical Aspects) IAEA Headquarters, Vienna, Austria 26-28 May 1997 Edited by O. Schwerer and H. Wienke October 1997 IAEA NUCLEAR DATA SECTION, WAGRAMERSTRASSE §, A-1400 VIENNA Reproduced by the IAEA in Austria October 1997 INDC(NDS)-374 Distr. G, NC Report on the Consultants' Meeting on CO-ORDINATION OF THE NUCLEAR REACTION DATA CENTERS (Technical Aspects) IAEA Headquarters, Vienna, Austria 26-28 May 1997 Edited by O. Schwerer and H. Wienke October 1997 Contents Introduction 7 The Network of Nuclear Reaction Data Centers 9 List of Acronyms 11 Agenda 13 List of Participants 15 Conclusions and Actions 17 Appendix 1 Agreement on Charged-Particle Data Compilation Responsibility 25 Status Reports Rl Nuclear Data Section 27 R2 RIKEN 41 R3 JCPRG 43 R4 CAJAD 47 R5 NDG-VNIIEF 51 R6 CNDC 53 R7 CJD 57 R8 NEA Data Bank 59 R9 ATOMKI 67 RIO NNDC 73 Selected Working Papers 77 NEXT PAQE(S) left BLANK -7- IAEA Consultants' Meeting on Co-ordination of the Nuclear Reaction Data Centers (Technical Aspects) IAEA Headquarters, Vienna, Austria 26-28 May 1997 Introduction The IAEA Nuclear Data Section convenes in annual intervals coordination meetings of the Network of the Nuclear Reaction Data Centers. The last meeting, with center heads and technical staff present, took place in Brookhaven, USA, 3-7 June 1996. See the report INDC(NDS)-360. The present meeting was attended by technical staff only to discuss technical matters of the nuclear data compilation and exchange by means of the jointly operated computerized systems CINDA, EXFOR, ENDF and others. -
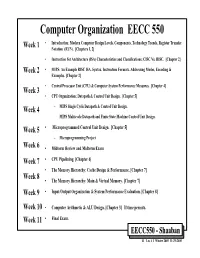
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN)
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN). [Chapters 1, 2] • Instruction Set Architecture (ISA) Characteristics and Classifications: CISC Vs. RISC. [Chapter 2] Week 2 • MIPS: An Example RISC ISA. Syntax, Instruction Formats, Addressing Modes, Encoding & Examples. [Chapter 2] • Central Processor Unit (CPU) & Computer System Performance Measures. [Chapter 4] Week 3 • CPU Organization: Datapath & Control Unit Design. [Chapter 5] Week 4 – MIPS Single Cycle Datapath & Control Unit Design. – MIPS Multicycle Datapath and Finite State Machine Control Unit Design. Week 5 • Microprogrammed Control Unit Design. [Chapter 5] – Microprogramming Project Week 6 • Midterm Review and Midterm Exam Week 7 • CPU Pipelining. [Chapter 6] • The Memory Hierarchy: Cache Design & Performance. [Chapter 7] Week 8 • The Memory Hierarchy: Main & Virtual Memory. [Chapter 7] Week 9 • Input/Output Organization & System Performance Evaluation. [Chapter 8] Week 10 • Computer Arithmetic & ALU Design. [Chapter 3] If time permits. Week 11 • Final Exam. EECC550 - Shaaban #1 Lec # 1 Winter 2005 11-29-2005 Computing System History/Trends + Instruction Set Architecture (ISA) Fundamentals • Computing Element Choices: – Computing Element Programmability – Spatial vs. Temporal Computing – Main Processor Types/Applications • General Purpose Processor Generations • The Von Neumann Computer Model • CPU Organization (Design) • Recent Trends in Computer Design/performance • Hierarchy -

IT Acronyms.Docx
List of computing and IT abbreviations /.—Slashdot 1GL—First-Generation Programming Language 1NF—First Normal Form 10B2—10BASE-2 10B5—10BASE-5 10B-F—10BASE-F 10B-FB—10BASE-FB 10B-FL—10BASE-FL 10B-FP—10BASE-FP 10B-T—10BASE-T 100B-FX—100BASE-FX 100B-T—100BASE-T 100B-TX—100BASE-TX 100BVG—100BASE-VG 286—Intel 80286 processor 2B1Q—2 Binary 1 Quaternary 2GL—Second-Generation Programming Language 2NF—Second Normal Form 3GL—Third-Generation Programming Language 3NF—Third Normal Form 386—Intel 80386 processor 1 486—Intel 80486 processor 4B5BLF—4 Byte 5 Byte Local Fiber 4GL—Fourth-Generation Programming Language 4NF—Fourth Normal Form 5GL—Fifth-Generation Programming Language 5NF—Fifth Normal Form 6NF—Sixth Normal Form 8B10BLF—8 Byte 10 Byte Local Fiber A AAT—Average Access Time AA—Anti-Aliasing AAA—Authentication Authorization, Accounting AABB—Axis Aligned Bounding Box AAC—Advanced Audio Coding AAL—ATM Adaptation Layer AALC—ATM Adaptation Layer Connection AARP—AppleTalk Address Resolution Protocol ABCL—Actor-Based Concurrent Language ABI—Application Binary Interface ABM—Asynchronous Balanced Mode ABR—Area Border Router ABR—Auto Baud-Rate detection ABR—Available Bitrate 2 ABR—Average Bitrate AC—Acoustic Coupler AC—Alternating Current ACD—Automatic Call Distributor ACE—Advanced Computing Environment ACF NCP—Advanced Communications Function—Network Control Program ACID—Atomicity Consistency Isolation Durability ACK—ACKnowledgement ACK—Amsterdam Compiler Kit ACL—Access Control List ACL—Active Current -

HP Openvms Cluster Software SPD 29.78.27
Software Product Description PRODUCT NAME: HP OpenVMS Cluster Software SPD 29.78.27 This Software Product Description describes Versions a mix of AlphaServer and VAX or AlphaServer and In- 6.2–1H3, 7.1–1H1, 7.1–1H2, 7.1–2, 7.2, 7.2–1, 7.2– tegrity server systems. In this SPD, this environment is 1H1, 7.2-2, 7.3, 7.3–1, 7.3–2, 8.2, 8.2–1 and 8.3 of the referred to as an OpenVMS Cluster system. following products: Systems in an OpenVMS Cluster system can share pro- • HP VMScluster Software for OpenVMS for Integrity cessing, mass storage (including system disks), and Servers other resources under a single OpenVMS security and management domain. Within this highly integrated en- • HP VMScluster Software for OpenVMS AlphaServers vironment, systems retain their independence because (through V8.3) they use local, memory-resident copies of the OpenVMS operating system. Thus, OpenVMS Cluster systems • HP VAXcluster Software for OpenVMS VAX (through can boot and shut down independently while benefiting V7.3) from common resources. • HP OpenVMS Cluster Client Software for Integrity Servers Applications running on one or more systems in an OpenVMS Cluster system can access shared resources • HP OpenVMS Cluster Client Software for Al- in a coordinated manner. OpenVMS Cluster soft- phaServers (part of NAS150) ware components synchronize access to shared re- sources, allowing multiple processes on any system in • HP OpenVMS Cluster Client Software for VAX the OpenVMS Cluster to perform coordinated, shared (through V7.3) (part of NAS150) data updates. Except where noted, the features described in this Because resources are shared, OpenVMS Cluster sys- SPD apply equally to Integrity server, AlphaServers and tems offer higher availability than standalone systems. -

1 DS-DWZZH-05 Ultrascsi Hub 1.1 General Overview
TruCluster Software Products Hardware Configuration Technical Update for DS-DWZZH-05 UltraSCSI Hub December 1998 Product Version: TruCluster Production Server Software Software Version 1.4A and TruCluster Production Server Software Version 1.5 and TruCluster Available Server Software 1.4A and TruCluster Available Server Software Version 1.5 Operating System and Version: Compaq’s DIGITAL UNIX Version 4.0B and Compaq’s DIGITAL UNIX Version 4.0D This technical update describes how to configure the DS-DWZZH-05 UltraSCSI hub in a TruCluster Software Products environment. Compaq Computer Corporation Houston, Texas © Compaq Computer Corporation 1998 All rights reserved. The following are trademarks of Compaq Computer Corporation: ALL–IN–1, Alpha AXP, AlphaGeneration, AlphaServer, AltaVista, ATMworks, AXP, Bookreader, CDA, DDIS, DEC, DEC Ada, DEC Fortran, DEC FUSE, DECnet, DECstation, DECsystem, DECterm, DECUS, DECwindows, DTIF, Massbus, MicroVAX, OpenVMS, POLYCENTER, PrintServer, Q–bus, StorageWorks, TruCluster, ULTRIX, ULTRIX Mail Connection, ULTRIX Worksystem Software, UNIBUS, VAX, VAXstation, VMS, XUI, and the Compaq logo. Prestoserve is a trademark of Legato Systems, Inc.; the trademark and software are licensed to Compaq Computer Corporation by Legato Systems, Inc. NFS is a registered trademark of Sun Microsystems, Inc. Open Software Foundation, OSF, OSF/1, OSF/Motif, and Motif are trademarks of the Open Software Foundation, Inc. UNIX is a registered trademark in the United States and other countries, licensed exclusively through X/Open Company, -
Certif Ication Handbook
Certification Handbook EXAM FC0-U51 TM TM CompTIA® IT Fundamentals™ (Exam FC0-U51) CompTIA® IT Fundamentals™ (Exam FC0-U51) 2 Chapter # | Name of chapter CompTIA® IT Fundamentals™ (Exam FC0-U51) CompTIA® IT Fundamentals™ (Exam FC0-U51) Part Number: 099004 Course Edition: 1.0 Acknowledgements We wish to thank the following project team for their contributions to the development of this certification study guide: Pamela J. Taylor, Laurie A. Perry, Gail Sandler, Jason Nufryk, Alex Tong, and Catherine M. Albano. Notices DISCLAIMER While CompTIA Properties, LLC takes care to ensure the accuracy and quality of these materials, we cannot guarantee their ac- curacy, and all materials are provided without any warranty whatsoever, including, but not limited to, the implied warranties of merchantability or fitness for a particular purpose. The name used in the data files for this course is that of a fictitious com- pany. Any resemblance to current or future companies is purely coincidental. We do not believe we have used anyone’s name in creating this course, but if we have, please notify us and we will change the name in the next revision of the course. Use of screenshots, photographs of another entity’s products, or another entity’s product name or service in this book is for edito- rial purposes only. No such use should be construed to imply sponsorship or endorsement of the book by, nor any affiliation of such entity with CompTIA Properties, LLC. This courseware may contain links to sites on the internet that are owned and operated by third parties (the “External Sites”).