Lithium Hydride Powered PEM Fuel Cells for Long-Duration Small Mobile Robotic Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Alternate Graphical Representation of Periodic Table of Chemical Elements Mohd Abubakr1, Microsoft India (R&D) Pvt
An Alternate Graphical Representation of Periodic table of Chemical Elements Mohd Abubakr1, Microsoft India (R&D) Pvt. Ltd, Hyderabad, India. [email protected] Abstract Periodic table of chemical elements symbolizes an elegant graphical representation of symmetry at atomic level and provides an overview on arrangement of electrons. It started merely as tabular representation of chemical elements, later got strengthened with quantum mechanical description of atomic structure and recent studies have revealed that periodic table can be formulated using SO(4,2) SU(2) group. IUPAC, the governing body in Chemistry, doesn‟t approve any periodic table as a standard periodic table. The only specific recommendation provided by IUPAC is that the periodic table should follow the 1 to 18 group numbering. In this technical paper, we describe a new graphical representation of periodic table, referred as „Circular form of Periodic table‟. The advantages of circular form of periodic table over other representations are discussed along with a brief discussion on history of periodic tables. 1. Introduction The profoundness of inherent symmetry in nature can be seen at different depths of atomic scales. Periodic table symbolizes one such elegant symmetry existing within the atomic structure of chemical elements. This so called „symmetry‟ within the atomic structures has been widely studied from different prospects and over the last hundreds years more than 700 different graphical representations of Periodic tables have emerged [1]. Each graphical representation of chemical elements attempted to portray certain symmetries in form of columns, rows, spirals, dimensions etc. Out of all the graphical representations, the rectangular form of periodic table (also referred as Long form of periodic table or Modern periodic table) has gained wide acceptance. -
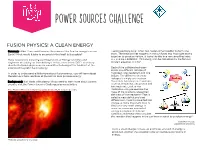
Power Sources Challenge
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

Unique Properties of Water!
Name: _______ANSWER KEY_______________ Class: _____ Date: _______________ Unique Properties of Water! Word Bank: Adhesion Evaporation Polar Surface tension Cohesion Freezing Positive Universal solvent Condensation Melting Sublimation Dissolve Negative 1. The electrons are not shared equally between the hydrogen and oxygen atoms of water creating a Polar molecule. 2. The polarity of water allows it to dissolve most substances. Because of this it is referred to as the universal solvent 3. Water molecules stick to other water molecules. This property is called cohesion. 4. Hydrogen bonds form between adjacent water molecules because the positive charged hydrogen end of one water molecule attracts the negative charged oxygen end of another water molecule. 5. Water molecules stick to other materials due to its polar nature. This property is called adhesion. 6. Hydrogen bonds hold water molecules closely together which causes water to have high surface tension. This is why water tends to clump together to form drops rather than spread out into a thin film. 7. Condensation is when water changes from a gas to a liquid. 8. Sublimation is when water changes from a solid directly to a gas. 9. Freezing is when water changes from a liquid to a solid. 10. Melting is when water changes from a solid to a liquid. 11. Evaporation is when water changes from a liquid to a gas. 12. Why does ice float? Water expands as it freezes, so it is LESS DENSE AS A SOLID. 13. What property refers to water molecules resembling magnets? How are these alike? Polar bonds create positive and negative ends of the molecule. -

Hydrogen, Nitrogen and Argon Chemistry
Hydrogen, Nitrogen and Argon Chemistry Author: Brittland K. DeKorver Institute for Chemical Education and Nanoscale Science and Engineering Center University of Wisconsin-Madison Purpose: To learn about 3 of the gases that are in Earth’s atmosphere. Learning Objectives: 1. Understand that the atmosphere is made up of many gases. 2. Learn about the differences in flammability of nitrogen and hydrogen. 3. Learn what is produced during electrolysis. Next Generation Science Standards (est. 2013): PS1.A: Structure and Properties of Matter PS1.B: Chemical Reactions PS3.D: Energy in Chemical Processes and Everyday Life (partial) ETS1.A: Defining Engineering Problems ETS1.B: Designing Solutions to Engineering Problems ETS1.C: Optimizing the Design Solution National Science Education Standards (valid 1996-2013): Physical Science Standards: Properties and changes of properties in matter Earth and Space Science Standards: Structure of the earth system Suggested Previous Activities: Oxygen Investigation and Carbon Dioxide Chemistry Grade Level: 2-8 Time: 1 hour Materials: Safety glasses Manganese dioxide Work gloves (for handling Tea-light candles steel wool) Matches Test tubes Spatulas Beakers Wooden splints 100mL graduated cylinders Waste bucket for burnt 15mL graduated cylinders materials 3% hydrogen peroxide Vinegar Baking soda Safety: 1. Students should wear safety glasses during all activities. 2. Students should not be allowed to use matches or candle. 3. Students should be cautioned to only mix the chemicals as directed. Introduction: Air refers to the mixture of gases that make up the Earth’s atmosphere. In this lesson, students will learn about hydrogen (present in very, very small amounts in our atmosphere), nitrogen (the most prevalent gas), and argon (third behind nitrogen and oxygen.) Procedures: 1. -

Boron- and Nitrogen-Based Chemical Hydrogen Storage Materials
international journal of hydrogen energy 34 (2009) 2303–2311 Available at www.sciencedirect.com journal homepage: www.elsevier.com/locate/he Review Boron- and nitrogen-based chemical hydrogen storage materials Tetsuo Umegaki, Jun-Min Yan, Xin-Bo Zhang, Hiroshi Shioyama, Nobuhiro Kuriyama, Qiang Xu* National Institute of Advanced Industrial Science and Technology (AIST), 1-8-31 Midorigaoka, Ikeda, Osaka 563-8577, Japan article info abstract Article history: Boron- and nitrogen-based chemical hydrides are expected to be potential hydrogen Received 20 November 2008 carriers for PEM fuel cells because of their high hydrogen contents. Significant efforts have Accepted 4 January 2009 been devoted to decrease their dehydrogenation and hydrogenation temperatures and Available online 4 February 2009 enhance the reaction kinetics. This article presents an overview of the boron- and nitrogen-based compounds as hydrogen storage materials. Keywords: ª 2009 International Association for Hydrogen Energy. Published by Elsevier Ltd. All rights Boron-based chemical hydrides reserved. Nitrogen-based chemical hydrides Hydrogen storage Dehydrogenation Hydrogenation Ammonia borane 1. Introduction in operating the system at high temperature poses an obstacle to its practical application. Chemical hydrogen Hydrogen is a globally accepted clean fuel. The use of storage materials, due to their high hydrogen contents, are hydrogen fuel cells in portable electronic devices or vehicles expected as potential hydrogen sources for fuel cells. Among requires lightweight -
MODULE 11: GLOSSARY and CONVERSIONS Cell Engines
Hydrogen Fuel MODULE 11: GLOSSARY AND CONVERSIONS Cell Engines CONTENTS 11.1 GLOSSARY.......................................................................................................... 11-1 11.2 MEASUREMENT SYSTEMS .................................................................................. 11-31 11.3 CONVERSION TABLE .......................................................................................... 11-33 Hydrogen Fuel Cell Engines and Related Technologies: Rev 0, December 2001 Hydrogen Fuel MODULE 11: GLOSSARY AND CONVERSIONS Cell Engines OBJECTIVES This module is for reference only. Hydrogen Fuel Cell Engines and Related Technologies: Rev 0, December 2001 PAGE 11-1 Hydrogen Fuel Cell Engines MODULE 11: GLOSSARY AND CONVERSIONS 11.1 Glossary This glossary covers words, phrases, and acronyms that are used with fuel cell engines and hydrogen fueled vehicles. Some words may have different meanings when used in other contexts. There are variations in the use of periods and capitalization for abbrevia- tions, acronyms and standard measures. The terms in this glossary are pre- sented without periods. ABNORMAL COMBUSTION – Combustion in which knock, pre-ignition, run- on or surface ignition occurs; combustion that does not proceed in the nor- mal way (where the flame front is initiated by the spark and proceeds throughout the combustion chamber smoothly and without detonation). ABSOLUTE PRESSURE – Pressure shown on the pressure gauge plus at- mospheric pressure (psia). At sea level atmospheric pressure is 14.7 psia. Use absolute pressure in compressor calculations and when using the ideal gas law. See also psi and psig. ABSOLUTE TEMPERATURE – Temperature scale with absolute zero as the zero of the scale. In standard, the absolute temperature is the temperature in ºF plus 460, or in metric it is the temperature in ºC plus 273. Absolute zero is referred to as Rankine or r, and in metric as Kelvin or K. -

Common Name: LITHIUM ALUMINUM HYDRIDE HAZARD
Common Name: LITHIUM ALUMINUM HYDRIDE CAS Number: 16853-85-3 RTK Substance number: 1121 DOT Number: UN 1410 Date: April 1986 Revision: November 1999 ----------------------------------------------------------------------- ----------------------------------------------------------------------- HAZARD SUMMARY * Lithium Aluminum Hydride can affect you when * Exposure to hazardous substances should be routinely breathed in. evaluated. This may include collecting personal and area * Contact can cause severe skin and eye irritation and burns. air samples. You can obtain copies of sampling results * Breathing Lithium Aluminum Hydride can irritate the from your employer. You have a legal right to this nose and throat. information under OSHA 1910.1020. * Breathing Lithium Aluminum Hydride can irritate the * If you think you are experiencing any work-related health lungs causing coughing and/or shortness of breath. Higher problems, see a doctor trained to recognize occupational exposures can cause a build-up of fluid in the lungs diseases. Take this Fact Sheet with you. (pulmonary edema), a medical emergency, with severe shortness of breath. WORKPLACE EXPOSURE LIMITS * Exposure can cause loss of appetite, nausea, vomiting, The following exposure limits are for Aluminum pyro powders diarrhea and abdominal pain. (measured as Aluminum): * Lithium Aluminum Hydride can cause headache, muscle weakness, loss of coordination, confusion, seizures and NIOSH: The recommended airborne exposure limit is coma. 5 mg/m3 averaged over a 10-hour workshift. * High exposure can affect the thyroid gland function resulting in an enlarged thyroid (goiter). ACGIH: The recommended airborne exposure limit is * Lithium Aluminum Hydride may damage the kidneys. 5 mg/m3 averaged over an 8-hour workshift. * Lithium Aluminum Hydride is a REACTIVE CHEMICAL and an EXPLOSION HAZARD. -

A Passive Lithium Hydride Based Hydrogen Generator for Low Power Fuel Cells for Long-Duration Sensor Networks
international journal of hydrogen energy 39 (2014) 10216e10229 Available online at www.sciencedirect.com ScienceDirect journal homepage: www.elsevier.com/locate/he A passive lithium hydride based hydrogen generator for low power fuel cells for long-duration sensor networks D. Strawser, J. Thangavelautham*, S. Dubowsky Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA 02139, USA article info abstract Article history: This paper focuses on developing an efficient fuel storage and release method for hydrogen Received 7 November 2013 using lithium hydride hydrolysis for use in PEM fuel cells for low power sensor network Received in revised form modules over long durations. Lithium hydride has high hydrogen storage density and 2 April 2014 achieves up to 95e100% yield. It is shown to extract water vapor freely from the air to Accepted 17 April 2014 generate hydrogen and has a theoretical fuel specific energy of up to 4900 Wh/kg. A critical Available online 23 May 2014 challenge is how to package lithium hydride to achieve reaction completion. Experiments here show that thick layers of lithium hydride nearly chokes the reaction due to buildup of Keywords: lithium hydroxide impeding water transport and preventing reaction completion. A model Hydrogen generator has been developed that describes this lithium hydride hydrolysis behavior. The model Lithium hydride accurately predicts the performance of an experimental system than ran for 1400 h and PEM consists of a passive lithium hydride hydrogen generator and PEM fuel cells. These results Sensor networks power supply offer important design guidelines to enable reaction completion and build long-duration Hydrolysis lithium hydride hydrogen generators for low power applications. -

A New Look at Lithium Hydride Chemical Biosensors Measure Brain Activity Recovering Infrastructure After a Biological Attack About the Cover
Lawrence Livermore National Laboratory October/November 2016 Also in this issue: A New Look at Lithium Hydride Chemical Biosensors Measure Brain Activity Recovering Infrastructure after a Biological Attack About the Cover Through a historic partnership between the Department of Energy (DOE) and the National Cancer Institute (NCI), Lawrence Livermore is applying its expertise in high-performance computing (HPC) to advance cancer research and treatment. As the article beginning on p. 4 describes, the Laboratory plays a crucial role in the partnership’s three pilot programs. In particular, Livermore experts are working in collaboration with NCI and other DOE labroatories to develop more advanced algorithms for improving predictive models, computational tools for better understanding cancer intiation, and data analytics techniques to search for patterns in vast amounts of patient data. The cover art combines an artist’s rendering of circulating tumor cells in the blood of a cancer patient with computer circuitry (representing HPC) in the background. Cover design: Amy E. Henke E. Amy design: Cover About S&TR At Lawrence Livermore National Laboratory, we focus on science and technology research to ensure our nation’s security. We also apply that expertise to solve other important national problems in energy, bioscience, and the environment. Science & Technology Review is published eight times a year to communicate, to a broad audience, the Laboratory’s scientific and technological accomplishments in fulfilling its primary missions. The publication’s goal is to help readers understand these accomplishments and appreciate their value to the individual citizen, the nation, and the world. The Laboratory is operated by Lawrence Livermore National Security, LLC (LLNS), for the Department of Energy’s National Nuclear Security Administration. -

Lithium Aluminium Hydride.Pdf
SIGMA-ALDRICH sigma-aldrich.com Material Safety Data Sheet Version 5.0 Revision Date 03/12/2011 Print Date 09/12/2011 1. PRODUCT AND COMPANY IDENTIFICATION Product name : Aluminium lithium hydride Product Number : 531502 Brand : Aldrich Supplier : Sigma-Aldrich 3050 Spruce Street SAINT LOUIS MO 63103 USA Telephone : +1 800-325-5832 Fax : +1 800-325-5052 Emergency Phone # (For : (314) 776-6555 both supplier and manufacturer) Preparation Information : Sigma-Aldrich Corporation Product Safety - Americas Region 1-800-521-8956 2. HAZARDS IDENTIFICATION Emergency Overview OSHA Hazards Water Reactive, Target Organ Effect, Toxic by ingestion, Corrosive Target Organs Kidney, Liver, Central nervous system GHS Classification Substances, which in contact with water, emit flammable gases (Category 1) Acute toxicity, Oral (Category 3) Skin corrosion (Category 1B) Serious eye damage (Category 1) GHS Label elements, including precautionary statements Pictogram Signal word Danger Hazard statement(s) H260 In contact with water releases flammable gases which may ignite spontaneously. H301 Toxic if swallowed. H314 Causes severe skin burns and eye damage. Precautionary statement(s) P223 Keep away from any possible contact with water, because of violent reaction and possible flash fire. P231 + P232 Handle under inert gas. Protect from moisture. P280 Wear protective gloves/ protective clothing/ eye protection/ face protection. P305 + P351 + P338 IF IN EYES: Rinse cautiously with water for several minutes. Remove contact lenses, if present and easy to do. Continue rinsing. P310 Immediately call a POISON CENTER or doctor/ physician. P370 + P378 In case of fire: Use dry sand, dry chemical or alcohol-resistant foam for extinction. P422 Store contents under inert gas. -

Xenon in Earth's Atmosphere Is Severely Mass Fractionated and Depleted Compared to Any Plausible Solar System Source Material, Yet Kr Is Unfractionated
Xenon Fractionation, Hydrogen Escape, and the Oxidation of the Earth Xenon in Earth's atmosphere is severely mass fractionated and depleted compared to any plausible solar system source material, yet Kr is unfractionated. These observations seem to imply that Xe has escaped from Earth. But to date no process has been identified that can cause Xe, which is heavier than Kr, to escape while Kr does not. Vigorous hydrodynamic hydrogen escape can produce mass fractionation in heavy gases (Hunten et al. 1987, Sasaki & Nakazawa 1988, Pepin 1991). The required hydrogen flux is very high but within the possible range permitted by solar Extreme Ultraviolet radiation (EUV, which here means radiation at wavelengths short enough to be absorbed efficiently by hydrogen) heating when Earth was on the order of 100 Myrs old or younger. However this model cannot explain why Xe escapes but Kr does not. Recently, what appears to be ancient atmospheric xenon has been recovered from several very ancient (3-3.5 Ga) terrestrial hydrothermal barites and cherts (Pujol 2011, 2013). What is eye-catching about this ancient Xe is that it is less fractionated that Xe in modern air. In other words, it appears that a process was active on Earth some 3 to 3.5 billion years ago that caused xenon to fractionate. By this time the Sun was no longer the EUV source that it used to. If xenon was being fractionated by escape — currently the only viable hypothesis — it had to be in the less unfamiliar context of Earth’s Archean atmosphere and under rather modest levels of EUV forcing. -

Water Molecules and Surface Tension Water Holds Unique Properties Which Makes It "Sticky" at the Surface
Water Molecules and Surface Tension Water holds unique properties which makes it "sticky" at the surface. Each individual water molecule has one large oxygen atom and two smaller hydrogen atoms. The hydrogen atoms hold a slightly positive charge, making the entire water molecule polar. Like tiny magnets, the hydrogen atoms attract the oxygen atoms from other water molecules, creating temporary hydrogen bonds within the water. Each water molecule experiences a pull from other water molecules from every direction, but water molecules at the surface do not have molecules above the surface to pull at them. These water molecules have more pull from the water below than the surface above. This difference in force packs the water molecules at the surface closer together than they are inside the liquid. The thin, dense layer of molecules produces the phenomenon called surface tension. VARIABLE: SOAP Detergent and Water Detergent and soap are similar chemically, except for the oil in them. Many soaps use natural fats. Soap and detergent molecules have two ends which act as a bridge between water molecules and grease (fat) molecules. One end is called hydrophilic- water loving which is the head of the molecule; the other end is hydrophobic- water fearing, which is the tail part of the molecule. This allows the soap or detergent to grab onto the grease from a dirty dish and use the other end of the detergent molecule to latch on to water to be washed away. When the grease and dirt is collected in the soap, a micelle is created. Detergent and Soap Break Surface Tension Detergent molecules' two ends make it able to break through the surface tension of water.