MODELING of MULTIBODY DYNAMICS in FORMULA SAE VEHICLE SUSPENSION SYSTEMS a Thesis Submitted to the Faculty of Purdue University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

REV 2011 Formula SAE Electric – Suspension Design
REV 2011 Formula SAE Electric – Suspension Design Marcin Kiszko 20143888 School of Mechanical Engineering, University of Western Australia Supervisor: Dr. Adam Wittek School of Mechanical Engineering, University of Western Australia Final Year Project Thesis School of Mechanical Engineering University of Western Australia Submitted: June 6th, 2011 Project Summary This thesis covers the suspension and steering design process for REV’s entirely new 2011 Formula SAE electric race vehicle. The team intends to utilise four wheel-hub motors endowing the vehicle with all-wheel-drive and extraordinary control over torque vectoring. The design objectives were to create a cost-effective, easy to manufacture and simple race suspension that would act as a predictable development base for the pioneering power train. The ubiquitous unequal-length, double-wishbone suspension with pull-rod spring damper actuation was chosen as the underlying set up. Much of the design took place during low technical knowledge as none of the team members or supervisors had pervious experience in FSAE. As a result a great portion of the design was based on UWAM’s 2001-2003 vehicles as these were subject to similar resource constraints and preceded the complex Kinetics suspension system. The kinematic design of the wishbones and steering was completed on graph paper while design of the components including FE analysis was carried out in SolidWorks. The spring and dampers where set up for pure roll, steady state conditions. The major hurdle during design was overcoming the conflicting dimension of the electric wheel- hub motor and pull-rod. Most of the suspension components are to be made from Chrome Molybdenum steel (AISI 4130). -
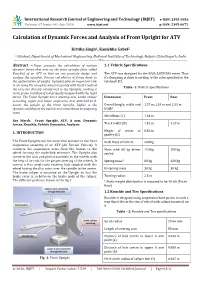
Calculation of Dynamic Forces and Analysis of Front Upright for ATV
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 04 | Apr 2020 www.irjet.net p-ISSN: 2395-0072 Calculation of Dynamic Forces and Analysis of Front Upright for ATV Kritika Singh1, Kanishka Gabel2 1,2Student, Department of Mechanical Engineering, National Institute of Technology, Raipur, Chhattisgarh, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract – Paper presents the calculation of various 1.1 Vehicle Specifications dynamic forces that acts on the front upright (also called Knuckle) of an ATV so that we can precisely design and The ATV was designed for the BAJA SAEINDIA event. Thus analyze the uprights. Precise calculation of forces leads to it’s designing is done according to the rules specified in the the optimization of weight. Uprights play an important role rulebook [1]. in carrying the complete wheel assembly with itself. Loads of Table -1: Vehicle Specifications the tires are directly transferred to the Uprights, making it more prone to failure if not properly designed with the right forces. The Front Upright has a steering arm, brake caliper Dimension Front Rear mounting, upper and lower suspension arm attached to it. Lower the weight of the Front Upright, higher is the Overall length, width and 1.97 m, 1.54 m and 1.51 m dynamic stability of the vehicle as it contributes to unsprung height mass. Wheelbase (L) 1.34 m Key Words: Front Upright, ATV, A arm, Dynamic forces, Knuckle, Vehicle Dynamics, Analysis Track width (B) 1.32 m 1.27 m Height of center of 0.56 m 1. INTRODUCTION gravity (H) The Front Uprights are the most vital element in the front Kerb Mass of vehicle 200 kg suspension assembly of an ATV (All-Terrain Vehicle). -

Design of a Suspension for a Formula Student Race Car
Design of a Suspension for a Formula Student Race Car Adam Theander VEHICLE DYNAMICS AERONAUTICAL AND VEHICLE ENGINEERING ROYAL INSTITUTE OF TECHNOLOGY TRITA-AVE-2004-26 ISSN 1651-7660 Postal Address Visiting Address Internet Telephone Telefax KTH Teknikringen 8 www.ave.kth.se +46 8 7906000 +46 8 7909290 Vehicle Dynamics Stockholm SE-100 44 Stockholm Sweden Abstract In July of 2004 KTH Racing will attend at the Formula Student event in England. The Formula Student event is a competition between schools that has built their own formula style race cars according to the Formula SAE rules. In January of 2004 the Formula Student project started at KTH involving over seventy students. The aim of this thesis work is to design the suspension and steering geometry for the race car being built. The design shall meet the demands caused by the different events in the competition. The design presented here will then be implemented into the chassis being built by students participating in the project. Results from this thesis work shows that the most suitible design of the suspension is a classical unequal length double A-arm design. This suspension type is easy to design and meets all demands. This thesis work is written in such a way that it can be used as a guidebook when designing the suspension and steering geometries of future Formula Student projects at KTH. Acknowledgements This master thesis has been conducted at the Division of Vehicle Dynamics, Department of Aeronautical and Vehicle Engineering at the Royal Institute of Technology, KTH, in Stockholm, Sweden. The work has been carried out from December 2003 to May 2004. -

California State University, Northridge
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE DESIGN AND ANALYSIS OF FORMULA SAE CAR SUSPENSION MEMBERS A thesis submitted in partial fulfillment of the requirements For the degree of Master of Science in Mechanical Engineering By Evan Drew Flickinger May 2014 The thesis of Evan Drew Flickinger is approved: Dr. Robert Ryan Date Dr. Nhut Ho Date Dr. Stewart Prince, Chair Date California State University, Northridge ii DEDICATION I dedicate this thesis in loving memory of my grandfather Russell H. Hopps (November 15th, 1928 – July 19th, 2012). Mr. Hopps graduated with high honors from Illinois in 1956. He joined Lockheed- California Company in 1967 and held numerous positions with the company before being named to vice president and general manager of engineering. He was responsible for all engineering at Lockheed and supervised 3500 engineers and scientists. Mr. Hopps was directly responsible for the preliminary design of six aircraft that have gone into production and for the incorporation of advanced systems in aircraft. He was an advisor for aircraft design and aeronautics to NASA, a receipt of the UIUC Aeronautical and Astronautical Engineering Distinguished Alumnus Award, and of the San Fernando Valley Engineers Council Merit Award. iii TABLE OF CONTENTS SIGNATURE PAGE .......................................................................................................... ii DEDICATION ................................................................................................................... iii LIST OF TABLES ............................................................................................................ -

Vehicle Dynamics Analysis and Design for a Narrow Electric Vehicle
Vehicle dynamics analysis and design for a narrow electric vehicle B.J.S. van Putten DCT 2009.110 Master’s Thesis Supervisors dr.ir. I.J.M. Besselink, Eindhoven University of Technology dr.ir. A.F.A. Serrarens, Small Advanced Mobility B.V. prof.dr. H. Nijmeijer, Eindhoven University of Technology Committee member dr.ir. C.C.M. Luijten, Eindhoven University of Technology Advisor D. van Sambeek M.Sc., Small Advanced Mobility B.V. Eindhoven University of Technology Department of mechanical engineering Automotive Engineering Science Eindhoven, November 2009 Preface Ever since my youth, my interest in cars has been great; nevertheless I had not expected this interest could also apply to the simulation of a virtual vehicle. During both my traineeship and the research leading to this work, this interest has grown. Moreover, it became clear to me that vehicle development is impossible without the application of some form of vehicle simulation. Nowadays, computational analysis and design probably are the most important tools in automobile development. It is likely that in the future the importance of this discipline will only develop further. From my perspective, knowledge about vehicle dynamics simulation is a must for my generation of automotive engineers interested in this field of technology. The vehicle of subject in this research is an interesting new approach to personal transport, combining high maneuverability in cities and sporty driving performance with guided automated highway travel. The fully electric drive of the CITO is state-of-the-art and fits well in current developments in legislation and public opinion on road transport. -

Front Suspension Overview
FRONT SUSPENSION OVERVIEW Our Initial Concept Suspension in solar cars is not designed to provide a smooth ride. Soft suspensions waste energy by absorbing the motion of the car as it travels over a bump. Therefore, solar cars have a very stiff suspension, which is designed to prevent damage to the frame in the event of a large jolt. For the front wheels almost all solar cars use double A-arm suspension, shown below. The double A-arm system has normally completely independent suspension in the front or rear and are commonly used in sports and racing cars. It is a more compact system that lowers the vehicle hood resulting in grater visibility and better aerodynamics. In our design we are using a Short-Long Double A-arm suspension. The upper arm is shorter to induce negative camber as the suspension rises. When the vehicle is in a turn, body roll results in positive camber gain on the outside wheel. The outside wheel also rises and gains negative camber due to the shorter upper arm. The suspension design attempts to balance these two effects to cancel out and keep the tire perpendicular to the ground. This is especially important for the outer tire because of the weight transfer to this tire during a turn. The picture below shows the short-long arm set up for the suspension in a normal car. Note the difference between the double A-arm suspension in a normal car when compared to the double A-arm suspension in a solar car. Solar car design uses long uprights mating onto high mounted wishbones reduces the thickness of the wheel fairings which lowers drag. -
Front Suspension Design for an Electric Delivery Vehicle
Master’s Thesis 2019 30 ECTS Faculty of Science and Technology Front Suspension Design for an Electric Delivery Vehicle Fredrik Lie Larsen Mechanics and Process Technology FRONT SUSPENSION DESIGN FOR AN ELECTRIC DELIVERY VEHICLE Fredrik Lie Larsen Norwegian University of Life Sciences i Preface This master thesis will present the development process of the front suspension system for the Paxster Electric Delivery Vehicle. The development ranged from geometric suspension analysis and setup using Lotus Engineering Shark, to initial component design of the wishbone and steering mounting bracket using the selected geometry and off-the-shelf parts. The thesis was written in spring of 2019 and is the final part of the Mechanics and Process Technology master program at the Faculty of Science and Technology at the Norwegian University of Life Sciences. The author’s motivation for writing this thesis is linked to my long-standing interest in vehicles and appreciation for the mechanical beauty of suspension systems. The thesis has also allowed me to work with the automotive industry, which has proved to be extremely educational and interesting. I would like to extend my sincere appreciation to my master thesis counselor, Associate Professor Odd-Ivar Lekang for his valuable input during the writing process. Paxster AS and their lead mechanical engineer, Peer Toftner provided me with the thesis assignment, without their trust and their expertise this thesis would not exist, thank you. I would also like to express my appreciation to my fellow classmates for valuable discussions during the thesis and our studies as a whole. I would also like to thank friends and family for all the support and motivation they have provided. -

Optimization of Front Suspension and Steering Parameters of an Off-Road Car Using Adams/Car Simulation
Published by : International Journal of Engineering Research & Technology (IJERT) http://www.ijert.org ISSN: 2278-0181 Vol. 6 Issue 09, September - 2017 Optimization of Front Suspension and Steering Parameters of an Off-road Car using Adams/Car Simulation Andrew S.Ansara, Andrew M.William, Maged A.Aziz, Peter N. Shafik Department of Mechanical Engineering Alexandria University Alexandria, Egypt Abstract— The design of an off-road vehicle is very points and angles of the fixations of the mechanical linkages on complicated as the car is subjected to very harsh conditions and it the chassis and the uprights. can fail easily causing a lot of damage if it isn’t designed well. One of the most important parameters affecting the car’s II. FRONT SUSPENSION performance is the suspension and steering systems design as it A. Front suspension geometry: affects the vehicle’s performance in handling, during breaking Any suspension geometry design must be designed and cornering, the tires contact with the ground, the forces acting specifically for the type of vehicle and the shape of its chassis on the vehicle’s chassis and it also affects the driver’s comfort as the suspension geometry is also defined as the method of during the ride. So given all that we need to pay a lot of attention connecting the un-sprung mass to the sprung mass and that to designing a set up where all the systems harmoniously work method controls the path of relative motion and the forces together to give the optimum performance that can allow to acting between them. -

Formula SAE Suspension Design
SAE TECHNICAL 2005-01-3994 PAPER SERIES E Formula SAE Suspension Design Gabriel de Paula Eduardo Universidade de São Paulo Filiada à XIV Congresso e Exposição Internacionais da Tecnologia da Mobilidade São Paulo, Brasil 22 a 24 de novembro de 2005 AV. PAULISTA, 2073 - HORSA II - CJ. 1003 - CEP 01311-940 - SÃO PAULO – SP 000000000PE2005-01-3994 Formula SAE Suspension Design Gabriel de Paula Eduardo Universidade de São Paulo Copyright © 2005 Society of Automotive Engineers, Inc ABSTRACT wheelbase are factors governing the success of the car’s handling characteristics. These two dimensions not only Resume a Formula SAE suspension design. After rules influence weight transfer, but they also affect the turning analysis, which limits the suspension a minimum travel and radius. The targets were at fist accept the rules, than low wheelbase, project targets were defined, than a system weight, create maximum mechanical grip, provide benchmarking was made on top teams. The tire behavior is quick response, transmit accurate driver feedback and be discussed. The unequal A-arms with tie-rod on front and able to adjust balance. rear suspension are detailed. The dimensional approach was developed on CAD concerning dimensional restrictions. TIRE AND WHEEL The transient stability, control and maneuvering performance were analyzed on overall forces and moments The suspension design process used an “outside-in” diagram. For kinematics and dynamic analysis a multibody approach by selecting tires that meet the vehicle model was used. Rollover, ride and handling were simulated requirements, and then designing the suspension to suit the and were done tuning on geometry, springs and dampers to tire parameters. -

Design of Rear Wheel Steering & Braking System for Self Propelled
International Journal of Innovative Research in Science, Engineering and Technology (IJIRSET) | e-ISSN: 2319-8753, p-ISSN: 2320-6710| www.ijirset.com | Impact Factor: 7.089| ||Volume 9, Issue 4, April 2020|| Design of Rear wheel Steering & Braking System for self Propelled Onion Harvester Prof. V. I. Pasare1, Sarvesh Lokhande2, Swapnil Karande3, Siddhartha Mangaonkar4, Prathmesh Pol5 1 Professor, Dept. of Mechanical Engineering, DYPCET, Kolhapur, Maharashtra, India 2,3,4,5 Students, Dept. of Mechanical Engineering, D. Y. Patil College of Engineering and Technology, Maharashtra, India ABSTRACT: Nowadays, the every vehicle existed mostly still using the front wheel steering system to control the movement of the vehicle whether it is front wheel drive, rear wheel drive or all wheel drive. The basic idea is to provide easy manoeuvrability with effective control. But due to the performance in terms of turning radius and steering at sharp corner rear wheel steered vehicle is always preferred. In this report, the performance of rear wheels steered vehicle model is considered which is optimally controlled during a lane change manoeuvre in low speed agricultural use. In this case rear wheel steer in opposite direction to the final turning direction and allowing much sharper turns. The provision of camber and caster should be provided according to the actual field condition such that there should be straight ahead movement with minimum turning effort. The machine is going to be operated in the field so that maximum speed will in the range of 14 to 15 km/hr. According to that braking time and stopping distance is being calculated for effective braking. -

Adaptive Suspension Strategy for a Double Wishbone Suspension Through Camber and Toe Optimization
Adaptive suspension strategy for a double wishbone suspension through camber and toe optimization Kavitha, C., Shankar, S. A., Ashok, B., Ashok, S. D., Ahmed, H. & Kaisan, M. U. Published PDF deposited in Coventry University’s Repository Original citation & hyperlink: Kavitha, C, Shankar, SA, Ashok, B, Ashok, SD, Ahmed, H & Kaisan, MU 2018, 'Adaptive suspension strategy for a double wishbone suspension through camber and toe optimization' Engineering Science and Technology, an International Journal, vol. 21, no. 1, pp. 149-158. https://dx.doi.org/10.1016/j.jestch.2018.02.003 DOI 10.1016/j.jestch.2018.02.003 ISSN 2215-0986] Publisher: Elsevier This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/). Copyright © and Moral Rights are retained by the author(s) and/ or other copyright owners. A copy can be downloaded for personal non-commercial research or study, without prior permission or charge. This item cannot be reproduced or quoted extensively from without first obtaining permission in writing from the copyright holder(s). The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the copyright holders. Engineering Science and Technology, an International Journal 21 (2018) 149–158 Contents lists available at ScienceDirect Engineering Science and Technology, an International Journal journal homepage: www.elsevier.com/locate/jestch Full Length Article Adaptive suspension strategy for a double wishbone suspension through -

Modification and Simulation of Double Wishbone Front Suspension in Safari Suv
Journal of Critical Reviews ISSN- 2394-5125 Vol 7, Issue 14, 2020 MODIFICATION AND SIMULATION OF DOUBLE WISHBONE FRONT SUSPENSION IN SAFARI SUV P. Ashoka Varthanan1, N. Jayasuriya2, V.Gowtham3 1, 2 Mechanical Engineering Department, Sri Krishna College of Engineering and Technology, Coimbatore – 641008, India, Email: [email protected] 3 Global Cylinder Managers, Wilhelmsen Group, USA Received: 08.04.2020 Revised: 10.05.2020 Accepted: 05.06.2020 Abstract Suspension is an indispensable element in automobile. Suspensions provide a safe and comfortable ride to the passengers. In this present work, a case study of existing double wishbone suspension and its application in sport utility vehicle (SUV) is done. The existing design of suspension in SUV produces more wear and decreases the life of the suspension parts. It also leads to reduction in the comfort of the passenger(s). A new design for the suspension mechanism is developed by altering the parameters of the existing safari dicor SUV’s double wishbone mechanism of suspension. Dynamic analysis was performed on the original SUV’s double wishbone suspension and the modified double swing mechanism of suspension. Roll angle at the centre of the wheels and the vertical displacement of the wheels during cornering were calculated from the analysis. A comparison is made between the original design and modified design to validate the best design. Keywords: Double wishbone suspension, double swing suspension, dynamic analysis, suspension system © 2020 by Advance Scientific Research. This is an open-access article under the CC BY license (http://creativecommons.org/licenses/by/4.0/) DOI: http://dx.doi.org/10.31838/jcr.07.14.27 INTRODUCTION analysis using ADAMS software package.