Front Suspension Overview
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Design and Analysis of Lower Control
ISSN(Online) : 2319-8753 ISSN (Print) : 2347-6710 International Journal of Innovative Research in Science, Engineering and Technology (An ISO 3297: 2007 Certified Organization) Vol. 5, Issue 4, April 2016 Design and Analysis of Lower Control ARM 1 2 M.Sridharan , Dr.S.Balamurugan P.G Student, Department of Mechanical Engineering, Mahendra Engineering College, Namakkal, Tamilnadu, India1 Head of the Department, Department of Mechanical Engineering, Mahendra Engineering College, Namakkal, Tamilnadu, India2 ABSTRACT: The main objective of this paper is to model and to perform structural analysis of a LOWER CONTROL ARM (LCA) used in the front suspension system, which is a sheet metal component. LCA is modeled in Pro-E software for the given specification. To analyze the LCA, CAE software is used. The load acting on the control arm are dynamic in nature, buckling load analysis is essential. First finite element analysis is performed to calculate the buckling strength, of a control arm. The FEA is carried out using Solid works stimulation package. The design modification has been done and FEA results are compared. The influencing parameters which are affecting the response are identified. After getting the final result of finite element analysis optimization has been done using design of experiment method. Taguchi’s design of experiments has been used to optimize the number of experiments. By reducing thickness of the sheet metal and by suggesting the suitable material the production cost of lower control arm is reduced. This leads to cost saving and improved material quality of the product. KEYWORDS: lower control arm, FEA, I. INTRODUCTION The suspension system caries the vehicle body and transmit all forces between the body and the road without transmitting to the driver and passengers. -

REV 2011 Formula SAE Electric – Suspension Design
REV 2011 Formula SAE Electric – Suspension Design Marcin Kiszko 20143888 School of Mechanical Engineering, University of Western Australia Supervisor: Dr. Adam Wittek School of Mechanical Engineering, University of Western Australia Final Year Project Thesis School of Mechanical Engineering University of Western Australia Submitted: June 6th, 2011 Project Summary This thesis covers the suspension and steering design process for REV’s entirely new 2011 Formula SAE electric race vehicle. The team intends to utilise four wheel-hub motors endowing the vehicle with all-wheel-drive and extraordinary control over torque vectoring. The design objectives were to create a cost-effective, easy to manufacture and simple race suspension that would act as a predictable development base for the pioneering power train. The ubiquitous unequal-length, double-wishbone suspension with pull-rod spring damper actuation was chosen as the underlying set up. Much of the design took place during low technical knowledge as none of the team members or supervisors had pervious experience in FSAE. As a result a great portion of the design was based on UWAM’s 2001-2003 vehicles as these were subject to similar resource constraints and preceded the complex Kinetics suspension system. The kinematic design of the wishbones and steering was completed on graph paper while design of the components including FE analysis was carried out in SolidWorks. The spring and dampers where set up for pure roll, steady state conditions. The major hurdle during design was overcoming the conflicting dimension of the electric wheel- hub motor and pull-rod. Most of the suspension components are to be made from Chrome Molybdenum steel (AISI 4130). -

Stress Analysis of a Suspension Control Arm Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada
Stress analysis of a suspension control arm Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada To cite this version: Paula Andrea Chacón Santamaría, Alejandro Sierra, Octavio Andrés González Estrada. Stress analysis of a suspension control arm. [Research Report] Universidad Industrial de Santander. 2018. hal- 01916247 HAL Id: hal-01916247 https://hal.archives-ouvertes.fr/hal-01916247 Submitted on 8 Nov 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. RESEARCH REPORT STRESS ANALYSIS OF A SUSPENSION CONTROL ARM Paula Andrea Chacón Santamaría Alejandro Sierra Octavio Andrés González-Estrada A010 Bucaramanga 2018 Research Group on Energy and Environment – GIEMA School of Mechanical Engineering Universidad Industrial de Santander P A Chacón Santamaría, A Sierra, O A González-Estrada, Stress analysis of a suspension control arm, School of Mechanical Engineering, Universidad Industrial de Santander. Research report, Bucaramanga, Colombia, 2018. Abstract: The suspension system of a vehicle absorbs energy to cushion and soften displacements in irregular terrains, and also supports its bodywork. Some of the components that allow the correct performance of the system are the control arms. This work aims to determine the stress distribution of a control arm for the rear suspension of a buggy vehicle. -

MODELING of MULTIBODY DYNAMICS in FORMULA SAE VEHICLE SUSPENSION SYSTEMS a Thesis Submitted to the Faculty of Purdue University
MODELING OF MULTIBODY DYNAMICS IN FORMULA SAE VEHICLE SUSPENSION SYSTEMS A Thesis Submitted to the Faculty of Purdue University by Swapnil Pravin Bansode In Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering May 2020 Purdue University Indianapolis, Indiana ii THE PURDUE UNIVERSITY GRADUATE SCHOOL STATEMENT OF THESIS APPROVAL Dr. Jing Zhang, Chair Department of Mechanical and Energy Engineering Dr. Hamid Dalir Department of Mechanical and Energy Engineering Dr. Lingxi Li Department of Electrical and Computer Engineering Approved by: Dr. Jie Chen Head of the Graduate Program iii Dedicated to loving memory of my mother and grandmother. iv ACKNOWLEDGMENTS I would like to express sincere gratitude to my advisor Dr. Jing Zhang for providing guidance and being an incredible source of knowledge throughout my research work. I would like to thank members of advisory committee, Dr. Hamid Dalir and Dr. Lingxi Li for sharing their thoughts and feedback which helped me broaden my perspective of research work. I would also like to thank Mr. Jerry Mooney for his valuable inputs for my thesis. I would like to thank IUPUI and entire staff of Department of Mechanical and Energy Engineering for providing support and assistance during various stages of my research. I would also like to thank my lab mates Tejesh, Harshal, Michael Golub, Jian, Xuehui and Lingbin for their support. Lastly, I would like to thank my aunt and all my family, for supporting me both financially and emotionally , along with my friends, Madhura, Tripthi, Jay, Fermin, Sailee and Riddhi for always being with me throughout my graduate journey. -

Design and FEA Analysis of a Double Wishbone Suspension System
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 08 Issue: 08 | Aug 2021 www.irjet.net p-ISSN: 2395-0072 Design and FEA Analysis of a Double Wishbone Suspension System Smit Shendge1, Heet Patel2, Yash Shinde3 1,2,3U.G. Student from the Department of Automobile Engineering at University of Wolverhampton, India ----------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - In this research study an independent type 1. 1 Background suspension system is considered to be exact a double A double wishbone suspension system was introduced in wishbone suspension system used in racing vehicle is the year of 1930s which was later implemented by Citroen a considered. First research on existing double wishbone French automaker in its model Rosalie and Traction Avant suspension system is made to design a new double wishbone in year 1934. Later Packard Motor Car Company based in suspension system. A double wishbone suspension parts are Detroit; Michigan also implemented this suspension from designed in a CAD tool Onshape and assembled in the CAD year 1935 in its Packard One-Twenty model. Observing tool itself. This geometry is then imported to an analysis tool Double wishbone suspension system and Macpherson strut Simscale for FEA analysis or to be exact static and dynamic suspension system it feels like they are related to each other analysis. Materials of various parts are considered according but that’s not the case a Macpherson strut suspension to the standards and both the analysis are carried out to design inspiration was taken from the landing gears of an validate if the made suspension assembly is a good design in aeroplane which has similar setup like Macpherson and terms of strength. -

Use Style: Paper Title
ISSN XXXX XXXX © 2017 IJESC Research Article Volume 7 Issue No.9 Analysis of Upper Control Arm of Suspension System Bhushan S. Chakor1, Prof. Y.B. Choudhary2 Student (ME, Design Engineering)1, Associate Professor2 Department of Mechanical Engineering NDMVP’S KBT College of Engineering, SPPU, Maharashtra, India Abstract: Suspension system in automobile is always responsible for safety and driving comfort as the suspension carries the entire vehicle body and transmits all forces between road and body. Suspension system absorbs the vibrations due to rough terrains or road disturbances. Suspension system also provides stability under different conditions like accelerating, uneven road, cornering, braking, loading and unloading. Control arm is important part of suspension system as it joints steering knuckle to vehicle frame. In automotive industry structure optimization techniques was used for light weight and performance improvement of modern new cars. However, static load conditions could not represent all the various situations of automobile parts which subjected to complex loads those varying with time, especially for lower control arm of front suspension. This paper deals with transient structural analysis of the upper control arm of double wishbone suspension and modal analysis was carried out using ANSYS software. Keywords: Double wishbone suspension, Modal analysis, Steering knuckle, Transient structural analysis, ANSYS software. I. INTRODUCTION of the failure, finite element analysis is done to evaluate stress distribution and reliability of wishbone. Furthermore, the Control arm is one of the most important part of the suspension metallographic and hardness evaluation were done on weld system. Control arm is made from the materials like steel, iron seam of the failed part. -
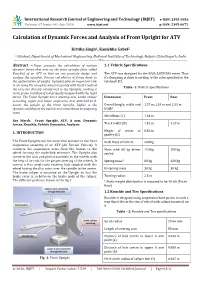
Calculation of Dynamic Forces and Analysis of Front Upright for ATV
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 04 | Apr 2020 www.irjet.net p-ISSN: 2395-0072 Calculation of Dynamic Forces and Analysis of Front Upright for ATV Kritika Singh1, Kanishka Gabel2 1,2Student, Department of Mechanical Engineering, National Institute of Technology, Raipur, Chhattisgarh, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract – Paper presents the calculation of various 1.1 Vehicle Specifications dynamic forces that acts on the front upright (also called Knuckle) of an ATV so that we can precisely design and The ATV was designed for the BAJA SAEINDIA event. Thus analyze the uprights. Precise calculation of forces leads to it’s designing is done according to the rules specified in the the optimization of weight. Uprights play an important role rulebook [1]. in carrying the complete wheel assembly with itself. Loads of Table -1: Vehicle Specifications the tires are directly transferred to the Uprights, making it more prone to failure if not properly designed with the right forces. The Front Upright has a steering arm, brake caliper Dimension Front Rear mounting, upper and lower suspension arm attached to it. Lower the weight of the Front Upright, higher is the Overall length, width and 1.97 m, 1.54 m and 1.51 m dynamic stability of the vehicle as it contributes to unsprung height mass. Wheelbase (L) 1.34 m Key Words: Front Upright, ATV, A arm, Dynamic forces, Knuckle, Vehicle Dynamics, Analysis Track width (B) 1.32 m 1.27 m Height of center of 0.56 m 1. INTRODUCTION gravity (H) The Front Uprights are the most vital element in the front Kerb Mass of vehicle 200 kg suspension assembly of an ATV (All-Terrain Vehicle). -

Comparison of the Friction Coefficient for Selected Car Suspensions Elements
SCIENTIFIC PROCEEDINGS XXII INTERNATIONAL SCIENTIFIC-TECHNICAL CONFERENCE "trans & MOTAUTO ’14" ISSN 1310-3946 COMPARISON OF THE FRICTION COEFFICIENT FOR SELECTED CAR SUSPENSIONS ELEMENTS Ph.D. Eng. Wozniak M1, Prof. M.Sc. Ozuna G.2, Ph.D. Eng. De La Fuente P. 3, M.Sc. Eng. Jozwiak P.1, Prof. M.Sc. Pawelski Z.1 Department of Vehicles and Fundamentals of Machine Design – Lodz University of Technology, Poland Department of Industrial Engineering and Systems - University of Sonora, Mexico 2 Department of Fluid-Energy Machines - Ruhr-University Bochum, Germany 3 [email protected], [email protected], [email protected], [email protected], [email protected] Abstract: This paper presents values comparison of friction coefficient inside ball joints depending course given by the vehicle, period of exploitation and the vehicle brand. Friction coefficient were defined on the contact surface between steel ball joint pin and the ball joint seat made from plastic covered by PTFE. For the selected working pair of the elements comparison of friction coefficient in load function are done. The preform of the measurements methodology and the test bench are additional show in the paper. Keywords: BALL JOINT, FRICTION COEFFICIENT, PIVOTING FRICTION, STRING. 1 1. Introduction 6 N⋅⋅ 2 1 rk pm ax= The set of phenomenon’s in the contact area between two π 3 2 2 2 − ν1 11 − ν2 bodies in the rest, or moving towards oneself friction is called. As a + 1 EE 2 result of these phenomena’s resistance of motion are arises. A lot of (1) kinds of the friction are distinguish. -

IFS1200/1320/1370 | Independent Front Suspension Maintenance Instructions Service Parts
Motorhome Suspensions Owner’s Manual IFS1200/1320/1370 | Independent Front Suspension Maintenance Instructions Service Parts Document #: D9834 Revision: P Revision Date: 12/09 Reyco Granning Suspensions 1205 Industrial Park Drive Mount Vernon, MO 65712 1-800-753-0050 Phone: 417-466-2178 www. r eycogranning. c o m Fax: 417-466-3964 COMPANY PROFILE Reyco Granning Suspensions was formed by the merger and acquisition of two well-known names in the heavy-duty vehicle suspension industry: Reyco and Granning. Reyco grew out of the Reynolds Mfg. Co. and was first known as a major supplier of brake drums for heavy-duty vehicles, and later developed a full line of air and steel spring suspensions for trucks, busses, trailers, and motorhomes. Granning Air Suspensions was founded in 1949 in Detroit, Michigan as a manufacturer of auxiliary lift axle suspensions. Granning later became an innovator of independent front air suspensions for the motorhome industry. Reyco Granning LLC was formed in early 2011 through a partnering of senior managers and MAT Capital, a private investment group headquartered in Long Grove, Illinois. Reyco Granning manufacturing facilities are certified to the ISO9001:2008 standards, a globally recognized assurance that quality standards have been established and are maintained by regular rigorous audits. Service Notes This Service Manual describes the correct service and repair procedures for the ReycoGranning® IFS1200/1320/1370 Independent Front Suspension. The information contained in this manual was current at the time of printing and is subject to change without notice or liability. You must follow your company safety procedures when you service or repair the suspension. -

Self-Aligning Exoskeleton Hip Joint: Kinematic Design with Five Revolute, Three Prismatic and One Ball Joint
Self-Aligning Exoskeleton Hip Joint: Kinematic Design with Five Revolute, Three Prismatic and One Ball Joint Jonas Beil, Charlotte Marquardt and Tamim Asfour Abstract— Kinematic compatibility is of paramount impor- tance in wearable robotic and exoskeleton design. Misalign- ments between exoskeletons and anatomical joints of the human body result in interaction forces which make wearing the exoskeleton uncomfortable and even dangerous for the human. In this paper we present a kinematically compatible design of an exoskeleton hip to reduce kinematic incompatibilities, so called macro- and micro-misalignments, between the human’s and exoskeleton’s joint axes, which are caused by inter-subject variability and articulation. The resulting design consists of five revolute, three prismatic and one ball joint. Design parameters such as range of motion and joint velocities are calculated based on the analysis of human motion data acquired by motion capture systems. We show that the resulting design is capable of self-aligning to the human hip joint in all three anatomical planes during operation and can be adapted along the dorsoventral and mediolateral axis prior to operation. Calculation of the forward kinematics and FEM-simulation considering kinematic and musculoskeletal constraints proved sufficient mobility and stiffness of the system regarding the range of motion, angular velocity and torque admissibility needed to provide 50 % assistance for an 80 kg person. Fig. 1. A rendering of the hip exoskeleton prototype. I. INTRODUCTION In wearable robotics, considerable research efforts are directed at the design and development of exoskeletons, hip propagate to the knee and ankle joint or vice versa. The which fulfill the major requirement of comfortable and safe structure of the human hip joint as a ball joint with three wearability by a human user. -

Design of Independent Suspension Mechanism for a Terrain Vehicle with Four Wheels Drive and Four Wheels Steering
1. Shpetim LAJQI, 2. Stanislav PEHAN, 3. Naser LAJQI, 4. Afrim GJELAJ, 5. Jože PŠENIČNIK, 6. Sašo EMIN DESIGN OF INDEPENDENT SUSPENSION MECHANISM FOR A TERRAIN VEHICLE WITH FOUR WHEELS DRIVE AND FOUR WHEELS STEERING 1, 3, 4. UNIVERSITY OF PRISHTINA, FACULTY OF MECHANICAL ENGINEERING, SUNNY HILL N.N., 10 000 PRISHTINA, KOSOV0 2. UNIVERSITY OF MARIBOR, FACULTY OF MECHANICAL ENGINEERING, SMETANOVA ULICA 17, 2 000 MARIBOR, SLOVENIA 5, 6. RTC - AUTOMOTIVE RESEARCH & DEVELOPMENT CENTER, CESTA K TAMU 7, 2 000 MARIBOR, SLOVENIA ABSTRACT: In this paper a terrain vehicle with four wheels drive and four wheels steer intended to use for recreational purpose is presented. The main purpose is to design the suspension mechanism that fulfills requirements about stability, safety and maneuverability. Nowadays, as well as in the past, the development of the suspension systems of the vehicle has shown greater interest by designers and manufacturers of the vehicles. Research is focused to do a comprehensive study of different available independent suspension system (MacPherson, double wishbone, multi-link) and hence forth develop a methodology to design the suspension system for a terrain vehicle. Few chosen suspension systems are analyzed into the very details in order to find out the optimal design of it. During development process of the suspension system should be considered design constraints and requirements provided in the check list. Afterwards the simulation results for kinematics analyses of suspension mechanism are performed in Working Model 2D and MATLAB environments. Achieved results are discussed in detail in order to find the best solution that will fulfill pretentious requirement from developed suspension system. -

23010231/2112 5414 by REGISTERED POST FAX : 011- 2617 1279 Air Headquarters Dte of Mechanical Transport West Block – VI, RK Puram, New Delhi – 110 066
Tele : 23010231/2112 5414 BY REGISTERED POST FAX : 011- 2617 1279 Air Headquarters Dte of Mechanical transport West Block – VI, RK Puram, New Delhi – 110 066 Air HQ/63204/8/MT (T) 11 Jun 2018 M/s BVEL, Sahibabad, Ghaziabad M/s BEML, New Delhi M/s Brij Basi Hi-Tech Udyog Limited, New Delhi REQUEST FOR PROPOSAL / INVITATION OF QUOTATION FOR ANNUAL MAINTENANCE CONTRACT (AMC) OF QTY – 16 BEML ACFTs ON LTE BASIS AND TWO BID SYSTEM 1. Quotation in Two bid system (Technical and Commercial bid) in separate sealed cover is invited on LTE basis for AMC of Qty-16 BEML ACFTs held at various operating units of IAF. Please superscribe the above mentioned title, RFP number and date of opening of the Bids on the sealed cover to avoid the Bid being declared invalid. 2. This tender has been e-published on Govt. of India Central Public Procurement Portal on date _______ at e-procure.gov.in. To reach the site, please navigate as under: e-procure.gov.in ------ Tender Search ------ Org Name ----- Indian Air Force --- City New Delhi ----- Product Category… Aviation ----- Search Note: RFP will be visible as well as available for download till 15 min prior to original closing time of the RFP 3. General information about the tender:- (a) Tender reference No. Air HQ/63204/8/MT (T) dated 11 Jun 2018 (b) Last date and time for 05 Jul 2018 by 1100 hrs receipt of tenders (21 days from date of floating RFP) (c) Time and date for 05 Jul 2018 at 1130 hrs opening the tenders (21 days from date of floating RFP) (d) Place of opening of Tender opening Room tenders Air Headquarters, Vayu Bhawan New Delhi 110 106 (e) Address for Clarification Air Headquarters, Dte of Mechanical Transport, West Block VI, RK Puram, New Delhi-110 066 Signature of Seller 2 __________________________________________________________________________ (f) Contact person and DMT, Air HQ, RKP, New Delhi 110 066 Tele contact No.