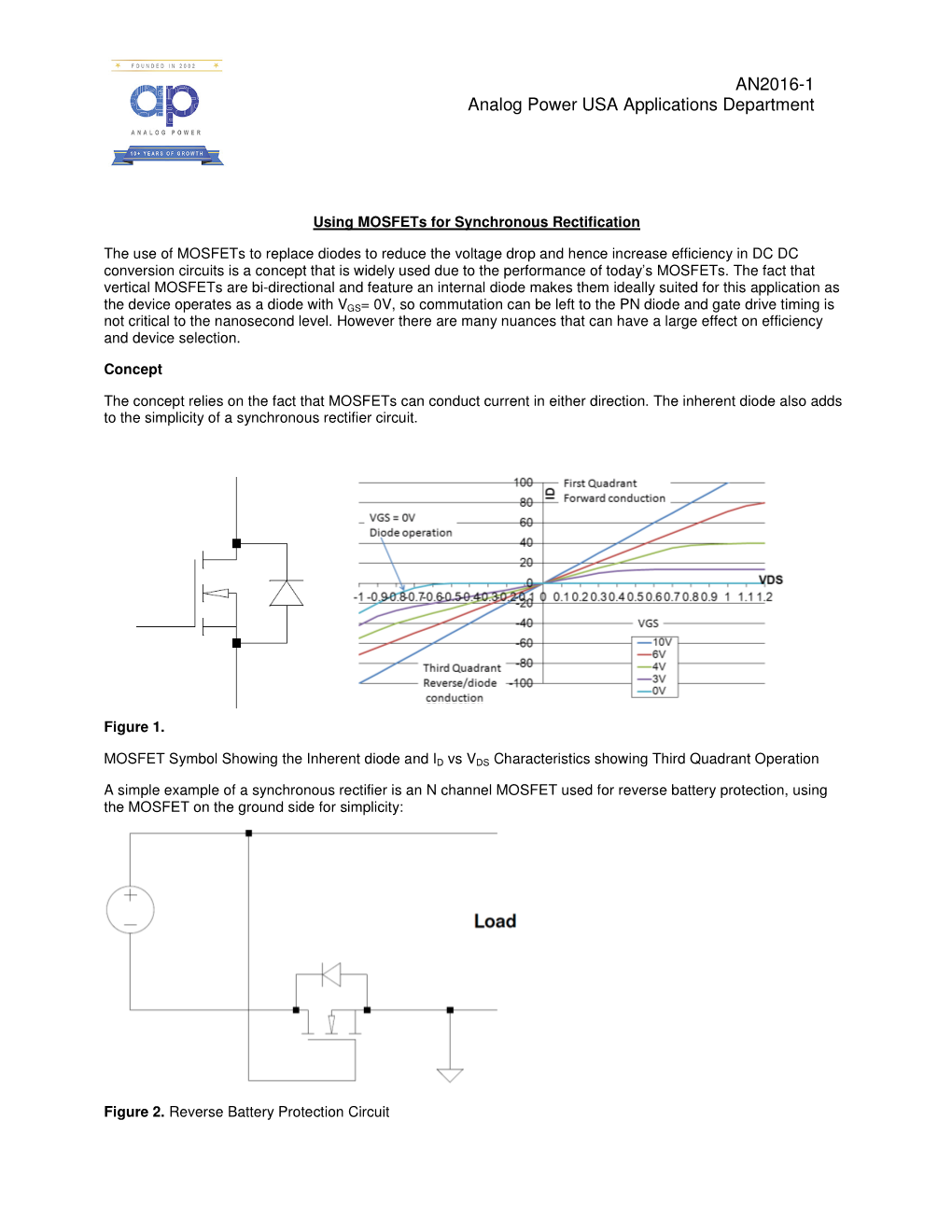
Using Mosfets for Synchronous Rectification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A High Efficiency 0.13Μm CMOS Full Wave Active Rectifier With
Advances in Science, Technology and Engineering Systems Journal ASTES Journal Vol. 2, No. 3, 1019-1025 (2017) ISSN: 2415-6698 www.astesj.com Special issue on Recent Advances in Engineering Systems A High Efficiency 0.13µm CMOS Full Wave Active Rectifier with Comparators for Implanted Medical Devices Joao˜ Ricardo de Castilho Louzada, Leonardo Breseghello Zoccal, Robson Luiz Moreno, Tales Cleber Pimenta Federal University of Itajuba,´ IEST, Itajuba´ - MG, Brazil ARTICLEINFO ABSTRACT Article history: This paper presents a full wave active rectifier for biomedical implanted Received: 30 April, 2017 devices using a new comparator in order to reduce the rectifier Accepted: 29 June, 2017 transistors reverse current. The rectifier was designed in 0.13µm Online: 11 July, 2017 CMOS process and it can deliver 1.2Vdc for a minimum signal of Keywords: 1.3Vac. It achieves a power conversion e ciency of 92% at the Active Rectifier ffi 13.56MHz Scientific and Medical (ISM) band. CMOS Comparator Medical Devices 1 Introduction but it is unusable for circuits running on power sup- plies of 1V or less. Alternatively to the conventional This paper is an extension of work originally pre- diodes, Schottky diodes can be used, but the manu- sented in The 15th International Symposium on In- facturing process of low forward drop voltage can be tegrated Circuits, Sigapure, 2016 [1]. It presents some more expensive than the traditional processes [4] be- details not described in the original paper. This paper cause they might not be present in some regular pro- also brings new results obtained after a new calibra- cesses and require extra fabrication steps [5]. -

Hexfet® Transistor Irhn9230
Provisional Data Sheet No. PD-9.1445 REPETITIVE AVALANCHE AND dv/dt RATED IRHN9230 ® HEXFET TRANSISTOR P-CHANNEL RAD HARD -200 Volt, 0.8Ω, RAD HARD HEXFET Product Summary International Rectifier’s P-Channel RAD HARD technology Part Number BVDSS RDS(on) ID HEXFETs demonstrate excellent threshold voltage stability and breakdown voltage stability at total radiation doses as IRHN9230 -200V 0.8Ω -6.5A high as 105 Rads (Si). Under identical pre- and post-radiation test conditions, International Rectifier’s P-Channel RAD HARD HEXFETs retain identical electrical specifications up Features: to 1 x 105 Rads (Si) total dose. No compensation in gate 5 drive circuitry is required. In addition these devices are also n Radiation Hardened up to 1 x 10 Rads (Si) capable of surviving transient ionization pulses as high as n Single Event Burnout (SEB) Hardened 1 x 1012 Rads (Si)/Sec, and return to normal operation within a few microseconds. Single Event Effect (SEE) testing of n Single Event Gate Rupture (SEGR) Hardened International Rectifier P-Channel RAD HARD HEXFETs has n Gamma Dot (Flash X-Ray) Hardened demonstrated virtual immunity to SEE failure. Since the P-Channel RAD HARD process utilizes International n Neutron Tolerant Rectifier’s patented HEXFET technology, the user can expect n Identical Pre- and Post-Electrical Test Conditions the highest quality and reliability in the industry. n Repetitive Avalanche Rating P-Channel RAD HARD HEXFET transistors also feature all Dynamic dv/dt Rating of the well-established advantages of MOSFETs, such as n voltage control,very fast switching, ease of paralleling and n Simple Drive Requirements temperature stability of the electrical parameters. -
Fundamentals of MOSFET and IGBT Gate Driver Circuits
Application Report SLUA618A–March 2017–Revised October 2018 Fundamentals of MOSFET and IGBT Gate Driver Circuits Laszlo Balogh ABSTRACT The main purpose of this application report is to demonstrate a systematic approach to design high performance gate drive circuits for high speed switching applications. It is an informative collection of topics offering a “one-stop-shopping” to solve the most common design challenges. Therefore, it should be of interest to power electronics engineers at all levels of experience. The most popular circuit solutions and their performance are analyzed, including the effect of parasitic components, transient and extreme operating conditions. The discussion builds from simple to more complex problems starting with an overview of MOSFET technology and switching operation. Design procedure for ground referenced and high side gate drive circuits, AC coupled and transformer isolated solutions are described in great details. A special section deals with the gate drive requirements of the MOSFETs in synchronous rectifier applications. For more information, see the Overview for MOSFET and IGBT Gate Drivers product page. Several, step-by-step numerical design examples complement the application report. This document is also available in Chinese: MOSFET 和 IGBT 栅极驱动器电路的基本原理 Contents 1 Introduction ................................................................................................................... 2 2 MOSFET Technology ...................................................................................................... -
How to Select a Capacitor for Power Supplies
CAPACITOR FUNDAMENTALS 301 HOW TO SELECT A CAPACITOR FOR POWER SUPPLIES 1 Capacitor Committee Upcoming Events PSMA Capacitor Committee Website, Old Fundamentals Webinars, Training Presentations and much more – https://www.psma.com/technical-forums/capacitor Capacitor Workshop “How to choose and define capacitor usage for various applications, wideband trends, and new technologies” The day before APEC, Saturday March 14 from 7:00AM to 6:00PM Capacitor Industry Session as part of APEC “Capacitors That Stand Up to the Mission Profiles of the Future – eMobility, Broadband” Tuesday March 17, 8:30AM to Noon in New Orleans Capacitor Roadmap Webinar – Timing TBD – Latest in Research and Technology Additional info here. Short Introduction of Today‘s Presenter Eduardo Drehmer Director of Marketing FILM Capacitors Background: • Over 20 years experience with knowledge on +1 732 319 1831 Manufacturing, Quality and Application of Electronic Components. [email protected] • Responsible for Technical Marketing for Film Capacitors www.tdk.com 2018-09-25 StM Short Introduction of Today‘s Presenter Edward Lobo was born in Acushnet, MA in 1943 and graduated from the University of Massachusetts in Amherst in 1967 with a BS in Chemistry. Ed worked for Magnetek, Aerovox and CDE where he is currently Chief Engineer for New Product Development. Ed Lobo Ed has served for over 52 years in Chief Engineer, New Product capacitor product development. He holds [email protected] 14 US patents involving capacitors. 4 ABSTRACT This presentation will guide individuals selecting components for their Electronic Power Supplies. Capacitors come in a wide variety of technologies, and each offers specific benefits that should be considered when designing a Power Supply circuit. -

Power MOSFET Basics by Vrej Barkhordarian, International Rectifier, El Segundo, Ca
Power MOSFET Basics By Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Breakdown Voltage......................................... 5 On-resistance.................................................. 6 Transconductance............................................ 6 Threshold Voltage........................................... 7 Diode Forward Voltage.................................. 7 Power Dissipation........................................... 7 Dynamic Characteristics................................ 8 Gate Charge.................................................... 10 dV/dt Capability............................................... 11 www.irf.com Power MOSFET Basics Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Discrete power MOSFETs Source Field Gate Gate Drain employ semiconductor Contact Oxide Oxide Metallization Contact processing techniques that are similar to those of today's VLSI circuits, although the device geometry, voltage and current n* Drain levels are significantly different n* Source t from the design used in VLSI ox devices. The metal oxide semiconductor field effect p-Substrate transistor (MOSFET) is based on the original field-effect Channel l transistor introduced in the 70s. Figure 1 shows the device schematic, transfer (a) characteristics and device symbol for a MOSFET. The ID invention of the power MOSFET was partly driven by the limitations of bipolar power junction transistors (BJTs) which, until recently, was the device of choice in power electronics applications. 0 0 V V Although it is not possible to T GS define absolutely the operating (b) boundaries of a power device, we will loosely refer to the I power device as any device D that can switch at least 1A. D The bipolar power transistor is a current controlled device. A SB (Channel or Substrate) large base drive current as G high as one-fifth of the collector current is required to S keep the device in the ON (c) state. Figure 1. Power MOSFET (a) Schematic, (b) Transfer Characteristics, (c) Also, higher reverse base drive Device Symbol. -

Aluminum Electrolytic Capacitors Power Application Capabilities
VISHAY INTERTECHNOLOGY, INC. aluMinuM electrolYtic capacitors Power Application Capabilities Aluminum Electrolytic Capacitors in Power Applications POWER APPLICATIONS • Motor Drives • Solar Inverters • Traction in trains or rolling stock • Uninterruptible Power Supply (UPS) • Pulsed Power RESOURCES • For technical questions contact [email protected] • Sales Contacts: http://www.vishay.com/doc?99914 A WORLD OF SOLUTIONS CAPABILITIES 1/11 VMN-PL0453-1610 THIS DOCUMENT IS SUBJECT TO CHANGE WITHOUT NOTICE. THE PRODUCTS DESCRIBED HEREIN AND THIS DOCUMENT ARE SUBJECT TO SPECIFIC DISCLAIMERS, SET FORTH AT www.vishay.com/doc?91000 www.vishay.com VISHAY INTERTECHNOLOGY, INC. aluMinuM electrolYtic capacitors for Motor Drives Introduction to the Application Motor drives are used to control the speed of various motors in all kinds of systems, from the small pumps and motors in household washing machines and central heating and air-conditioning systems to the large motors found in industrial machinery. Selecting the Best Capacitor for Your Motor Drive Application Aluminum capacitors are often used as DC link capacitors in motor drives, both in 1-phase and 3-phase designs. The aluminum capacitor is used as an energy buffer to ensure stable operation of the switch mode inverter driving the motor. The aluminum capacitor also functions as a filter to prevent high-frequency components from the switch mode inverter from polluting the mains voltage. The key selection criterion for the aluminum capacitor is the required ripple current. The ripple current consists of two components, a low-frequency ripple (50 Hz to 200 Hz) from the input and a high-frequency component from the inverter, typically 8 kHz to 20 kHz. -

Lecture 9: Diodes Circuits and Bjts
Lecture 9: Diodes Circuits and BJTs Gu-Yeon Wei Division of Engineering and Applied Sciences Harvard University [email protected] Wei 1 Overview • Reading – S&S: Chapter 3.7, 4.1~3 • Supplemental Reading • Background – We will finish off diode circuits with a full-wave rectifier circuit. Then, we will begin looking at transistors with the bipolar junction transistor. We will spend some time understanding how they work based on what we know about pn junctions. One way to look at a BJT transistor is two back-to-back diodes. Wei ES154 - Lecture 9 2 Rectifier Circuits • One of the most important applications of diodes is in the design of rectifier circuits. Used to convert an AC signal into a DC voltage used by most electronics. Wei ES154 - Lecture 9 3 Full-Wave Rectifier • To utilize both halves of the input sinusoid use a center-tapped transformer… Wei ES154 - Lecture 9 4 Bridge Rectifier • Looks like a Wheatstone bridge. Does not require a center- tapped transformer. – Requires 2 additional diodes and voltage drop is double. Wei ES154 - Lecture 9 5 Peak Rectifier • To smooth out the peaks and obtain a DC voltage, add a cap across the output Wei ES154 - Lecture 9 6 Bipolar Junction Transistor • NPN BJT shown • 3 terminals: emitter, base, and collector • 2 junctions: emitter-base junction and collector-base junction • Depending on the biasing across each of the junctions, different modes of operation are obtained – cutoff, active, and saturation MODE EBJ CBJ Cutoff Revese Reverse Active Forward Reverse Saturation Forward Forward Wei -

In Electrolytic Capacitor Manufacturer That We Introduce the with the Snap - in Electrolytic Capacitor in the Application of the Rectifier Filter
1 SHANGHAI JINPEI ELECTRONICS CO., LTD 上海金沛电子有限公司 Jinpei as a professional snap - in electrolytic capacitor manufacturer that we introduce the with the snap - in electrolytic capacitor in the application of the rectifier filter In the applications of rectifier power frequency filtering, the snap - in electrolytic capacitor due to its large capacity, high pressure and has an irreplaceable position.In power frequency rectifier filter applications, as a consumer, should pay attention to the snap - in electrolytic capacitr what performance? With single-phase and three-phase rectifier circuit of aluminium electrolytic capacitor and under different ways of filtering of the output current of the rectifier and capacitor ripple current below Can see from the picture, both in unidirectional rectifier and three-phase rectifier type can be divided into input filter capacitance and inductance type input filter.The former circuit is simple, but through the filter capacitor ripple current is big;Although the latter circuit is complex, but it can greatly reduce the ripple current flows through the filter capacitor.In the power output of the rectifier is large Choose the latter as well. The choice of rated voltage Undoubtedly, the first is the snap - in electrolytic capacitor pressure.Must not be lower than rated voltage peak voltage that may occur.Such as ac 220 V input rectifier, directly under the most unfavorable circumstances possible rated voltage + 20%, or 264 V, the rectifier voltage peak will reach about 370. After the V, light as the parasitic -

MBR40H100WTG Switch-Mode Power Rectifier 100 V, 40 A
MBR40H100WTG Switch-mode Power Rectifier 100 V, 40 A Features and Benefits http://onsemi.com • Low Forward Voltage • Low Power Loss/High Efficiency SCHOTTKY BARRIER • High Surge Capacity RECTIFIER • 175°C Operating Junction Temperature 40 AMPERES • 40 A Total (20 A Per Diode Leg) • These Devices are Pb−Free, Halogen Free/BFR Free and are RoHS 100 VOLTS Compliant 1 Applications 2, 4 • Power Supply − Output Rectification 3 • Power Management • Instrumentation Mechanical Characteristics: • Case: Epoxy, Molded • Epoxy Meets UL 94 V−0 @ 0.125 in 1 TO−247 • Weight: 4.3 Grams (Approximately) 2 CASE 340AL 3 • Finish: All External Surfaces Corrosion Resistant and Terminal Leads are Readily Solderable • Lead Temperature for Soldering Purposes: MARKING DIAGRAM 260°C Max. for 10 Seconds MAXIMUM RATINGS Please See the Table on the Following Page B40H100 AYWWG B40H100 = Specific Device Code A = Assembly Location Y = Year WW = Work Week G = Pb−Free Package ORDERING INFORMATION Device Package Shipping MBR40H100WTG TO−247 30 Units/Rail (Pb−Free) © Semiconductor Components Industries, LLC, 2014 1 Publication Order Number: July, 2014 − Rev. 5 MBR40H100WT/D MBR40H100WTG MAXIMUM RATINGS (Per Diode Leg) Rating Symbol Value Unit Peak Repetitive Reverse Voltage VRRM 100 V Working Peak Reverse Voltage VRWM DC Blocking Voltage VR Average Rectified Forward Current IF(AV) A TC = 148°C, per Diode 20 TC = 150°C, per Device 40 Peak Repetitive Forward Current IFRM 40 A (Square Wave, 20 kHz) TC = 144°C Nonrepetitive Peak Surge Current IFSM 200 A (Surge applied at rated -

The Many Benefits of SCR Power Control Sponsored By: Advanced Energy Industries, Inc
Produced by: IEEE Globalspec Media Solutions September 2017 The Many Benefits of SCR Power Control Sponsored by: Advanced Energy Industries, Inc. In today’s competitive, cost-conscious industrial landscape, semiconductor and general manufacturing industries need a reliable, flexible, and precise way to control electric- SCR power controllers heating processes. These applications require precise control, ease-of-use, and excellent are more reliable and reliability. SCR power controllers are ideal devices for this purpose. cost-efficient than Silicon-controlled rectifier (SCR) power controllers were developed in the late 1950s, and other controllers since then their power capabilities have changed from a few hundred watts to several such as variable megawatts. Their use in industrial applications has dramatically increased and they are transformers, now used in almost every major industry. These controllers consist of thyristors and a control circuit and can switch electrical loads within milliseconds, billions of times. contactors, or other mechanical devices. Power Controllers Offered by Advanced Energy Industries They also offer a finer degree of Advanced Energy Industries, Inc. (AE), a world leader in precision power and control products, offers several SCR power controllers that meet the toughest design challenges. control and need less AE’s Thyro line provides accurate temperature control for leading semiconductor and maintenance. industrial manufacturers. The products include: • Thyro-S® (newly enhanced) • Thyro-A® (newly enhanced) • Thyro-AX® • Thyro-PX® Thyro-S and Thyro-A SCR power controllers have been improved with features that significantly improve the customer’s ease-of-use experience. Advantages of SCR Power Controllers SCR power controllers are more reliable and cost-efficient than other controllers such as variable transformers, contactors, or other mechanical devices. -

A High-Efficiency CMOS Rectifier for RF Using Bulk Biasing Control Circuit
Journal of Integrated Circuits and Systems, vol. 13 , n. 2, 2018 1 A High-Efficiency CMOS Rectifier for RF Using Bulk Biasing Control Circuit 1 2 3 T. O. Moraes Junior , R. C. S. Freire , and C. P. Souza 1Department of Electrical Engineering, Mauricio de Nassau University Center, Campina Grande, Brazil 2 Department of Electrical Engineering, Federal University of Campina Grande, Campina Grande, Brazil 3 Department of Electrical Engineering, Federal University of Paraíba, João Pessoa, Brazil, e-mail: [email protected] the source and drain terminals of the CMOS transistors are Abstract— In MOSFET-transistor based rectifier circuits, clearly not continuous and, consequently, a positive poten- leakage currents occur through both source-bulk and drain- tial difference appear across the drain-bulk junction and bulk connections of their transistors causing some power dissi- across source-bulk junction causing leakage current through pation decreasing their efficiency. Such a scenario is more the respective bulk due to the appearance of parasitic di- worrying in ultra-low power circuits as those used in energy harvesting. As a solution, in this work it is proposed a control odes. circuit of transistor bulk biasing that switches the bulk bias in In order to reduce or eliminate such leakage currents, it is an efficient way assuring adequate inversion of the source-bulk shown some half-wave rectifiers in [11] and [12] that uses a and drain-bulk junctions. The rectifier based on the proposed scheme of switching the bulk terminals of the diode- bulk biasing control circuit shows to be a high-efficiency one connected transistors in order to reduce the threshold volt- capable of reducing the leakage currents. -
Understanding Scr Power Controls
16587 Coastal Highway Lewes, DE 19958 PHONE (302) 703-6865 FAX (302) 703-6876 [email protected] www.scrpower.com UNDERSTANDING SCR POWER CONTROLS When selecting SCR Power Controls, it is important to have a basic understanding of how SCRs work. This will help you select the right SCR for your application. HOW SCR POWER CONTROLS WORK A silicon controlled rectifier (SCR) is a solid state switching device which can provide fast, infinitely variable proportional control of electric power. Not only does this give maximum control of your heat process, but it can extend heater life many times over other control methods. Since the SCR is solid state, it can cycle on and off over a billion times, if properly used. The advantages of SCR Controls over other temperature control methods Improved response time Closer process control Extended heater life Reduced maintenance costs. No mechanical wear. Silent operation. No arcing and sparking. Reduced peak power consumption Remember, a heating element is made of wire in most cases. If you use a mechanical relay to turn on your heater, it will cycle on or off within 30 seconds or longer. The heater will expand and contract, getting more and more brittle each time. This is called thermal shock. Temperature overshoot may also occur. Relays also arc, spark and will burn out on a regular basis. Mercury displacement relays can cycle from 3-15 seconds. While it controls better than a mechanical contractor, overshoot and thermal shock will still occur. If cycled too fast, Mercury relays can overheat and explode causing Haz-Mat problems.