Using Timelines of GPS-Measured Precipitable Water in Forecasting Lightning at Cape Canaveral AFS and Kennedy Space Center
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lightning and the Space Program
National Aeronautics and Space Administration facts Lightning and the Space NASA Program Lightning protection systems weather radar, are the primary Air Force thunderstorm surveil- lance tools for evaluating weather conditions that lead to the ennedy Space Center operates extensive lightning protec- issuance and termination of lightning warnings. Ktion and detection systems in order to keep its employees, The Launch Pad Lightning Warning System comprises 31 the 184-foot-high space shuttle, the launch pads, payloads and electric field mills uniformly distributed throughout Kennedy processing facilities from harm. The protection systems and the and Cape Canaveral. They serve as an early warning system detection systems incorporate equipment and personnel both for electrical charges building aloft or approaching as part of a at Kennedy and Cape Canaveral Air Force Station (CCAFS), storm system. These instruments are ground-level electric field located southeast of Kennedy. strength monitors. Information from this warning system gives forecasters information on trends in electric field potential Predicting lightning before it reaches and the locations of highly charged clouds capable of support- Kennedy Space Center ing natural or triggered lightning. The data are valuable in Air Force 45th Weather Squadron – The first line of detecting early storm electrification and the threat of triggered defense for lightning safety is accurately predicting when and lightning for launch vehicles. where thunderstorms will occur. The Air Force 45th Weather The Lightning Detection and Ranging system, developed Squadron provides all weather support for Kennedy/CCAFS by Kennedy, detects and locates lightning in three dimensions operations, except space shuttle landings, which are supported using a “time of arrival” computation on signals received at by the National Atmospheric and Oceanic Administration seven antennas. -

Three Events Occurred During This Period Which Together Constitute A
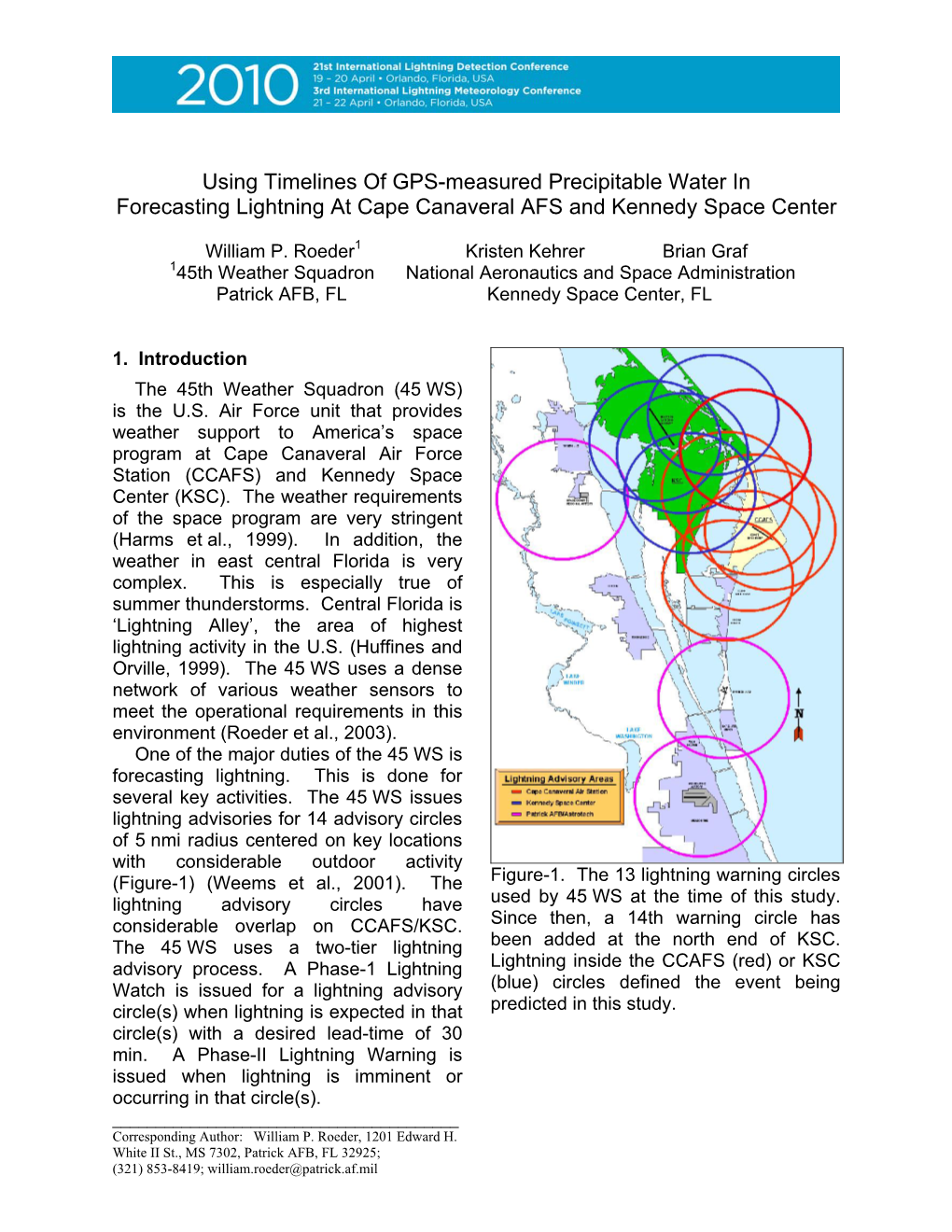
P10.2 Recent Weather Support Improvement Initiatives By The 45th Weather Squadron William P. Roeder Johnny W. Weems William H. Bauman III * 45th Weather Squadron * ENSCO, Inc. Patrick Air Force Base, FL Cocoa Beach, FL 1. INTRODUCTION Due to these forecast challenges, the 45 WS participates in an active operational research program to The mission of the 45th Weather Squadron (45 WS) meet our customers’ many stringent and unusual is to ‘exploit the weather to ensure safe access to air forecasting requirements. This research focuses on the and space’ at Cape Canaveral Air Force Station most important operational needs of the customers (CCAFS), NASA’s Kennedy Space Center (KSC) and including lightning forecasting, lightning launch commit Patrick Air Force Base. The 45 WS provides criteria, convective wind forecasting, forecasting of comprehensive weather services for personnel safety, boundary layer peak winds in our cool season, and low resource protection, pre-launch ground processing, day- temperature forecasting. The 45 WS also provides of-launch, post-launch, aviation, and special operations. extensive climatological assistance to our customers. These services are provided for more than 30 space launch countdowns per year by the Department of Defense (DoD), National Aeronautics and Space Administration (NASA), and commercial launch customers. Weather presents significant challenges to space lift and is the leading cause of countdown delayed and scrubbed launches. The 45 WS mission is complicated by the extreme forecasting challenges along the central coast of Florida in the ‘Thunderstorm Capital’ of the U.S. (Figure 1). The most frequent warning products issued by 45 WS are for lightning and convective winds. -

A Decade of Weather Technology Delivered to America's Space Program by the Applied Meteorology Unit
A Decade of Weather Technology Delivered to America's Space Program by the Applied Meteorology Unit Francis J. Merceret, NASA/KSC/YA-D William H. Bauman III, AMU/ENSCO, Inc. William P. Roeder, 45WS/SYR Richard A. Lafosse, SMG/JSC/ZS-8 David W. Sharp, NOAA/NWS/MLB Abstract The Applied Meteorology Unit (AMU) is a unique joint venture of NASA, the Air Force and the National Weather Service (NWS). The AMU develops, evaluates and transitions new technology and techniques to improve weather support to spaceport operations at the Eastern Range and Kennedy Space Center (KSC). Its primary customers are the 45th Weather Squadron (45WS) at Cape Canaveral Air Force Station (CCAFS), the Spaceflight Meteorology Group (SMG) at Johnson Space Center in Houston, TX, and the National Weather Service (NWS) Office in Melbourne, FL. Its products are used to support NASA's Shuttle and ELV programs as well as Department of Defense and commercial launches from the Eastern Range. Shuttle support has highest priority and includes landing sites elsewhere in the US and overseas. This paper presents a brief overview of the AMU and how it is tasked by its customers to provide high priority products and services followed by a sampling of products delivered over the last ten years that are currently in operational use. Each example describes the problem to be solved, the solution provided, and the operational benefits of implementing the solution. An Overview of the AMU The AMU was established in 1991 based on recommendations from a “blue-ribbon” NASA advisory panel1 and the National Research Council (NRC)2. -

ID Purchaser First Name Purchaser Last Name
ID Purchaser_First_Name Purchaser_Last_Name Inscribed_First_Name Inscribed_Last_Name Biographic_Infomation 2069 Suzy Tabor 07 Pine Crest Chaperones 1313 Lewis Maness Officers & Men of 47th INF 9th Division To the Officers and Men of the 2nd Battalion, 47th Infantry 9thDivision during WW II. This battalion captured, intact '8' GermanV-2 missiles. These missiles were shipped to the United States, where they were studied and thus played a great part in establishing the U.S. Missile Program and NASA. 1147 Eugene Abruzzo Eugene Abruzzo 1328 Carl F. Acker Carl F. Acker Contributor To: Lunar Module Program as Instrumentation and Calibration Engineer for vehicle and ground support equipment. Grumman Aerospace Corp. Cassini Mission to Saturn and Hubble Telescope Programs as Program Quality Assurance Manager for the reaction wheel and electronic assemblies and rate gyro assemblies Allied Signal Corp. 183 Trudy S. Adams Chuck Keith Adams The Space Program had a very special person in Chuck, who served with dedication, skill and the highest of standards as an Engineer with Lockheed. In this way he can always fell he is still a part of this exciting program. 1213 Sammi Adams Mac C. Adams Dr. Mac C. Adams played a major role in solving the problem ballistic missile reentry and helped to develop the theory which determines the type & amount of ablating material needed to protect spacecraft & ballistic missile heat shields. From 1965-1968,Dr. Adams was Associate Administrator, Advanced Research &Technology for the National Aeronautics & Space Administration in Washington D.C Received Exceptional Service Medal in 1968 1941 Your Family Loves You! Richard "Dick" Adams Mr. Richard "Dick" Adams is an extraordinary tour guide and has been since 1969. -

Air Force Weather, Our Heritage 1937-2012.” AFWA Agreed to This Approach in December 2009
AIR FORCE WEATHER OUR HERITAGE 1937 TO 2012 “DIRECTORATE OF WEATHER” Jul 1937 - 1950 May 1958 - 1978 Apr 1991 - Present Air Weather Service Air Force Weather Agency 14 Apr 1943 - 15 Oct 1997 15 Oct 1997 - Present Air Force, Reserve, & Guard Component Weather Units 1 Oct 1991 to Present “MEETING THE CHALLENGE FOR 75 YEARS” TABLE OF CONTENTS COVER PAGE FRONTISPIECE ………….…………………………………………ii SIGNATURE TITLE PAGE ………………………………………..iii DEDICATION……………………………………………………...iv TABLE OF CONTENTS………………………………………….…xii SECRETARY OF DEFENSE LETTER…………………………..…xv FOREWARD……………………………………………………...xvi PREFACE..…………………………………………………..…..xvii ACKNOWLEDGEMENTS…...…………………………………....xix CHAPTER 1—The Roots and Lineage of Air Force Weather……1-1 CHAPTER 2—Chronology1937 – 1946……………………………2-1 CHAPTER 3—Chronology 1947 – 1956……………………….…..3-1 CHAPTER 4—Chronology 1957 – 1966……………………….…..4-1 CHAPTER 5—Chronology 1967 – 1976……………………..…….5-1 CHAPTER 6—Chronology 1977 – 1986………………………..….6-1 CHAPTER 7—Chronology 1987 – 1996……………………….…..7-1 CHAPTER 8—Chronology 1997 – 2006……………………….…..8-1 CHAPTER 9—Chronology 2007 – 2012………………………..….9-1 CHAPTER 10—Air Force Weather Leadership and Staff……....10-1 USAF Directorates of Weather……………………………………10-1 xii Major Air Command Weather Functional Managers……………..10- 32 Air Weather Service Commanders…………………………..…...10- 34 Air Force Weather Agency Commanders………………………...10- 51 USAF Directorate of Weather Staff…………………………...…10- 68 Air Weather Service Staff…………………………………….…10- 71 Air Force Weather Agency Staff………………………………....10- 77 CHAPTER 11—Air Force -

Weather Impacts on Space Operations
The Space Congress® Proceedings 1992 (29th) Space - Quest For New Fontiers Apr 21st, 2:00 PM Paper Session I-A - Weather Impacts on Space Operations J. Madura 45th Weather Squadron B. Boyd 45th Weather Squadron N. Wyse 45th Weather Squadron M. Adams 45th Weather Squadron Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Madura, J.; Boyd, B.; Wyse, N.; and Adams, M., "Paper Session I-A - Weather Impacts on Space Operations" (1992). The Space Congress® Proceedings. 9. https://commons.erau.edu/space-congress-proceedings/proceedings-1992-29th/april-21-1992/9 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. WEATHER IMPACTS ON SPACE OPERATIONS J. MADURA, B. BOYD, W. BAUMAN, N. WYSE, AND M. ADAMS 45TH WEATHER SQUADRON (AFSPACECOM) PATRICK AIR FORCE BASE, FLORIDA 32925 INTRODUCTION The 45th Weather Squadron of the United States Air Force provides weather support to Patrick Air Force Base, Cape Canaveral Air Force Station (CCAFS), Eastern Range, and Kennedy Space Center (KSC). The support includes weather observations, forecasts, climatological studies and consultant services to a wide variety of Range users. The most visible to the general public is weather support to space vehicles, particularly the Space Shuttle. That support includes resource protection, ground processing, launch, and Ferry Flight; as well as consultant to the Spaceflight Meteorology Group (at Johnson Space Center) for landing forecasts. -

Federal Plan for Meteorological Services and Supporting Research, FY2016
The Federal Plan for Meteorological Services and Supporting Research Fiscal Year 2016 OFFICE OF THE FEDERAL COORDINATOR FOR METEOROLOGICAL SERVICES AND SUPPORTING RESEARCH OFCMA Half-Century of Multi-Agency Collaboration FCM-P1-2015 U.S. DEPARTMENT OF COMMERCE/National Oceanic and Atmospheric Administration THE FEDERAL COMMITTEE FOR METEOROLOGICAL SERVICES AND SUPPORTING RESEARCH (FCMSSR) DR. KATHRYN SULLIVAN MR. BENJAMIN PAGE (Observer) Chair, Department of Commerce Office of Management and Budget DR. TAMARA DICKINSON MR. EDWARD L. BOLTON, JR. Office of Science and Technology Policy Department of Transportation DR. SETH MEYER MR. DAVID L. MILLER Department of Agriculture Federal Emergency Management Agency Department of Homeland Security MR. MANSON K. BROWN Department of Commerce MR. JOHN GRUNSFELD National Aeronautics and Space Administration MR. EARL WYATT Department of Defense DR. ROGER WAKIMOTO National Science Foundation DR. GERALD GEERNAERT Department of Energy MR. PAUL MISENCIK National Transportation Safety Board DR. REGINALD BROTHERS Science and Technology Directorate MR. GLENN TRACY Department of Homeland Security U.S. Nuclear Regulatory Commission DR. JERAD BALES DR. JENNIFER ORME-ZAVALETA Department of the Interior Environmental Protection Agency MR. KENNETH HODGKINS COL PAUL ROELLE (Acting) Department of State Federal Coordinator for Meteorology MR. MICHAEL BONADONNA, Secretariat Office of the Federal Coordinator for Meteorological Services and Supporting Research THE INTERDEPARTMENTAL COMMITTEE FOR METEOROLOGICAL SERVICES AND SUPPORTING RESEARCH (ICMSSR) COL PAUL ROELLE, Chair (Acting) MR. RICKEY PETTY DR. DAVID R. REIDMILLER Federal Coordinator for Meteorology Department of Energy Department of State MR. MARK BRUSBERG DR. VAUGHN STANDLEY DR. ROHIT MATHUR Department of Agriculture Department of Energy Environmental Protection Agency DR. LOUIS UCCELLINI MR. -

Three Events Occurred During This Period Which Together Constitute A
P7.3 THE WEATHER SAFETY EDUCATION PROGRAM AT 45TH WEATHER SQUADRON William P. Roeder, J. Scott Jones, Daniel W. Oien 45th Weather Squadron, Patrick Air Force Base FL John T. Madura, Weather Office, Kennedy Space Center FL 1. INTRODUCTION Weather can also significantly affect recovery operations. The best example is the at-sea recovery of the The 45th Weather Squadron (45 WS) conducts an solid rocket booster motors after a Space Shuttle launch. extensive weather safety education program. This Wind and wave conditions can make recovery unsafe, program is summarized below. The authors hope this leading to a delay or scrub of a Shuttle launch. paper will encourage increased and improved weather The 45 WS also supports special missions, such as safety education by others. the Space Shuttle Ferry Flight (Priselac et al., 1997). Other special missions include transport of large 2. BACKGROUND components on oversized aircraft such as the Super The 45th Weather Squadron is the US Air Force unit Guppy, transport of large components on barges across that provides comprehensive weather services to the Gulf of Mexico to the east coast of Florida, and America’s space program at the US Air Force Cape astronaut rescue exercises. Another special mission is Canaveral Air Force Station (CCAFS) and NASA Kennedy space launch with radioactive material onboard (Boyd Space Center (KSC) (Boyd et al., 1993). These services et al., 2004). are challenging because of the stringent operational Weather can also significantly threaten personnel and requirements, subtle but dramatic weather, and dense and resources. The 45 WS is responsible for a large suite of atypical network of local meteorological sensors. -
NASA's Applied Meteorology Unit
NASA’s Applied Meteorology Unit Bridging the Gap Between Research and Operations The AMU is co-located with Range Weather Operations at Cape Canaveral Air Force Station, Fla., and tasks range from evaluating data from a weather sensor system to analysis of numerical weather prediction models. NSCO’s team of meteorologists develops, evaluates and transitions new Etechnologies into operations for weather support to America’s space program. The AMU develops products The Applied Meteorology Unit (AMU) has been staffed by ENSCO, Inc. employees since its inception in 1991. The AMU, jointly sponsored by NASA, the United States that assimilate new weather Air Force, and the National Weather Service, provides technology development, technologies to increase evaluation and transition services to improve weather support for space flight, the military, and commercial spaceport operations at Kennedy Space Center and Cape safety, reduce cost, and Canaveral Air Force Station, Fla., Wallops Flight Facility, Va., and Vandenberg Air Force Base, Calif. lessen weather impacts for Bridging research and operations space operations. The AMU is a bridge between the meteorological research community and operational forecasters at the 45th Weather Squadron, 30th Operational Support Squadron Weather Flight, Spaceflight Meteorology Group, NASA Wallops Flight Facility, and the Melbourne, Fla., National Weather Service office. AMU scientists work with both researchers and forecasters to evaluate new and emerging technologies in an operational setting, develop procedures for implementing new technologies, and help identify new solutions to operational forecasting problems. In addition, the AMU provides expert technical assistance to operations in real time, as requested. The AMU shares the results of their efforts with numerous agencies through quarterly reports and participates in ongoing technical interchanges as the need arises. -

Air Force Institute of Technology Research Report 2000 Office of the Associate Dean for Research and Consulting, Graduate School of Engineering and Management, AFIT
Air Force Institute of Technology AFIT Scholar AFIT Documents 4-1-2001 Air Force Institute of Technology Research Report 2000 Office of the Associate Dean for Research and Consulting, Graduate School of Engineering and Management, AFIT Follow this and additional works at: https://scholar.afit.edu/docs Recommended Citation Office of the Associate Dean for Research and Consulting, Graduate School of Engineering and Management, AFIT, "Air Force Institute of Technology Research Report 2000" (2001). AFIT Documents. 18. https://scholar.afit.edu/docs/18 This Report is brought to you for free and open access by AFIT Scholar. It has been accepted for inclusion in AFIT Documents by an authorized administrator of AFIT Scholar. For more information, please contact [email protected]. AFIT/EN-TR-01-01 TECHNICAL REPORT March 2001 Air Force Institute of Technology Research Report 2000 Period of Report: 1 October 1999 to 30 September 2000 Graduate School of Engineering and Management GRADUATE SCHOOL OF ENGINEERING AND MANAGEMENT AIR FORCE INSTITUTE OF TECHNOLOGY WRIGHT-PATTERSON AIR FORCE BASE, OHIO Approved For Public Release: Distribution Unlimited AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force Base, Ohio The Department of Defense, federal government, and non-government agencies supported the work reported herein. Reproduction of all or part of this document is authorized. Edited and produced by the Office of Research and Consulting, AFIT/ENR. For additional information, please call or email: (937) 255-3633 DSN 785-3633 [email protected] or visit the AFIT website: www.afit.edu Air Force Institute of Technology Research Report 2000 Foreword The Graduate School of Engineering and Management at the Air Force Institute of Technology (AFIT) provides responsive, defense focused graduate education and research to help sustain the technological supremacy of the United States Air Force (USAF). -
A History of the Lightning Launch Commit Criteria and the Lightning Advisory Panel for America’S Space Program
https://ntrs.nasa.gov/search.jsp?R=20110000675 2019-08-30T13:44:50+00:00Z NASA/SP—2010–216283 A History of the Lightning Launch Commit Criteria and the Lightning Advisory Panel for America’s Space Program Francis J. Merceret, Editor NASA, John F. Kennedy Space Center John C. Willett, Editor Air Force Research Laboratory (Retired) Hugh J. Christian University of Alabama in Huntsville James E. Dye National Center for Atmospheric Research, Boulder, Colorado E. Phillip Krider University of Arizona, Department of Atmospheric Sciences John T. Madura NASA, John F. Kennedy Space Center T. Paul O’Brien Aerospace Corporation, El Segundo, California W. David Rust National Severe Storms Laboratory Richard L. Walterscheid Aerospace Corporation, Space Sciences Department, El Segundo, California National Aeronautics and Space Administration John F. Kennedy Space Center Kennedy Space Center, FL 32899 August 2010 Executive Summary Since natural and artificially-initiated (or ‘triggered’) lightning are demonstrated hazards to the launch of space vehicles, the American space program has responded by establishing a set of Lightning Launch Commit Criteria (LLCC) and Definitions to mitigate the risk. The LLCC apply to all Federal Government ranges and have been adopted by the Federal Aviation Administration for application at state-operated and private spaceports. The LLCC and their associated definitions have been developed, reviewed, and approved over the years of the American space program starting from relatively simple rules in the mid-twentieth century (that were not adequate) to a complex suite for launch operations in the early 21st century. During this evolutionary process, a “Lightning Advisory Panel (LAP)” of top American scientists in the field of atmospheric electricity was established to guide it. -

Local Data Integration Over East-Central Florida Using the ARPS Data Analysis System
VOLUME 17 WEATHER AND FORECASTING FEBRUARY 2002 Local Data Integration over East-Central Florida Using the ARPS Data Analysis System JONATHAN L. CASE AND JOHN MANOBIANCO ENSCO, Inc., Cocoa Beach, and Applied Meteorology Unit, NASA, Kennedy Space Center, Florida TIMOTHY D. ORAM AND TIM GARNER Space¯ight Meteorology Group, NASA, Johnson Space Center, Texas PETER F. B LOTTMAN AND SCOTT M. SPRATT NOAA/National Weather Service, Melbourne, Florida (Manuscript received 30 October 2000, in ®nal form 31 August 2001) ABSTRACT The Applied Meteorology Unit has con®gured the Advanced Regional Prediction System (ARPS) Data Analysis System (ADAS) to support operational short-range weather forecasting over east-central Florida, including the Kennedy Space Center and Cape Canaveral Air Force Station. The ADAS was modi®ed to assimilate nationally and locally available in situ and remotely sensed observational data into a series of high-resolution gridded analyses every 15 min. The goal for running ADAS over east-central Florida is to generate real-time analysis products that may enhance weather nowcasts and short-range (,6 h) forecasts issued by the 45th Weather Squadron (45 WS), the Space¯ight Meteorology Group (SMG), and the National Weather Service (NWS) at Melbourne, Florida (MLB). The locally con®gured ADAS has the potential to provide added value because it ingests all operationally available data into a single grid analysis at high spatial and temporal resolutions. ADAS-generated grid analyses can provide forecasters with a tool to develop a more comprehensive understanding of evolving ®ne-scale weather features than could be obtained by individually examining the disparate data sources.