Improved Geodetic Control by GPS for Establishing a Geographic Information System for Sri Lanka S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Module No. 1840 1840-1
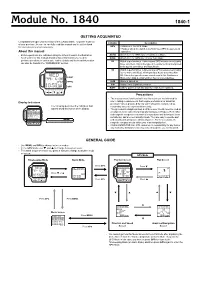
Module No. 1840 1840-1 GETTING ACQUAINTED Congratulations upon your selection of this CASIO watch. To get the most out Indicator Description of your purchase, be sure to carefully read this manual and keep it on hand for later reference when necessary. GPS • Watch is in the GPS Mode. • Flashes when the watch is performing a GPS measurement About this manual operation. • Button operations are indicated using the letters shown in the illustration. AUTO Watch is in the GPS Auto or Continuous Mode. • Each section of this manual provides basic information you need to SAVE Watch is in the GPS One-shot or Auto Mode. perform operations in each mode. Further details and technical information 2D Watch is performing a 2-dimensional GPS measurement (using can also be found in the “REFERENCE” section. three satellites). This is the type of measurement normally used in the Quick, One-Shot, and Auto Mode. 3D Watch is performing a 3-dimensional GPS measurement (using four or more satellites), which provides better accuracy than 2D. This is the type of measurement used in the Continuous LIGHT Mode when data is obtained from four or more satellites. MENU ALM Alarm is turned on. SIG Hourly Time Signal is turned on. GPS BATT Battery power is low and battery needs to be replaced. Precautions • The measurement functions built into this watch are not intended for Display Indicators use in taking measurements that require professional or industrial precision. Values produced by this watch should be considered as The following describes the indicators that reasonably accurate representations only. -
Leonetti-Geo3.Pdf
GEO 3 Il Mondo: i paesaggi, la popolazione e l'economia 3 media:-testo di Geografia C3 pag. 2 Geo 3: Il Mondo I paesaggi, la popolazione, l’economia Per la Scuola Secondaria di Primo Grado a cura di Elisabetta Leonetti Coordinamento editoriale: Antonio Bernardo Ricerca iconografica: Cristina Capone Cartine tematiche: Studio Aguilar Copertina Ginger Lab - www.gingerlab.it Settembre 2013 ISBN 9788896354513 Progetto Educationalab Mobility IT srl Questo libro è rilasciato con licenza Creative Commons BY-SA Attribuzione – Non commerciale - Condividi allo stesso modo 3.0 http://creativecommons.org/licenses/by-nc-sa/3.0/legalcode Alcuni testi di questo libro sono in parte tratti da Wikipedia Versione del 11/11/2013 Modificato da [email protected] – 23/9/15 INDICE GEO 3 Glossario Mappe-Carte AulaVirtuale 3 media:-testo di Geografia C3 pag. 3 Presentazione Questo ebook fa parte di una collana di ebook con licenza Creative Commons BY-SA per la scuola. Il titolo Geo C3 vuole indicare che il progetto è stato realizzato in modalità Collaborativa e con licenza Creative Commons, da cui le tre “C” del titolo. Non vuole essere un trattato completo sull’argomento ma una sintesi sulla quale l’insegnante può basare la lezione, indicando poi testi e altre fonti per gli approfondimenti. Lo studente può consultarlo come riferimento essenziale da cui partire per approfondire. In sostanza, l’idea è stata quella di indicare il nocciolo essenziale della disciplina, nocciolo largamente condiviso dagli insegnanti. La licenza Creative Commons, con la quale viene rilasciato, permette non solo di fruire liberamente l’ebook ma anche di modificarlo e personalizzarlo secondo le esigenze dell’insegnante e della classe. -

Moüjmtaiim Operations
L f\f¿ áfó b^i,. ‘<& t¿ ytn) ¿L0d àw 1 /1 ^ / / /This publication contains copyright material. *FM 90-6 FieW Manual HEADQUARTERS No We DEPARTMENT OF THE ARMY Washington, DC, 30 June 1980 MOÜJMTAIIM OPERATIONS PREFACE he purpose of this rUanual is to describe how US Army forces fight in mountain regions. Conditions will be encountered in mountains that have a significant effect on. military operations. Mountain operations require, among other things^ special equipment, special training and acclimatization, and a high decree of self-discipline if operations are to succeed. Mountains of military significance are generally characterized by rugged compartmented terrain witn\steep slopes and few natural or manmade lines of communication. Weather in these mountains is seasonal and reaches across the entireSspectrum from extreme cold, with ice and snow in most regions during me winter, to extreme heat in some regions during the summer. AlthoughNthese extremes of weather are important planning considerations, the variability of weather over a short period of time—and from locality to locahty within the confines of a small area—also significantly influences tactical operations. Historically, the focal point of mountain operations has been the battle to control the heights. Changes in weaponry and equipment have not altered this fact. In all but the most extreme conditions of terrain and weather, infantry, with its light equipment and mobility, remains the basic maneuver force in the mountains. With proper equipment and training, it is ideally suited for fighting the close-in battfe commonly associated with mountain warfare. Mechanized infantry can\also enter the mountain battle, but it must be prepared to dismount and conduct operations on foot. -

24000100.Pdf
BY ORDER OF THE COMMANDER, PACIFIC AIR FORCES PACAF PAMPHLET 24-1 1 JULY 1996 Transportation AIRLIFT PLANNING GUIDE ________________________________________________________________________________________________ THIS PUBLICATION IS ONLY A GUIDE. IT IS NOT INTENDED TO BE A SINGLE SOURCE FOR PROCEDURES CONTAINED IN OTHER MANUALS OR INSTRUCTIONS. Developing airlift requests can at times seem to be a rather complex task. There are numerous areas that must be addressed, any one of which can cause the approval of the request to be delayed. This information is provided to assist you in both planning your airlift requirements and preparing your actual requests. If you have any suggestions for changes, additions, deletions, etc. for this pamphlet, please submit to PAMO at any time. More detailed information on airlift requests is provided in AFR 76-38/AR 59-8/ OPNAVINST 4630.18E/MCO 4630.6D/DLAR 4540.9 or USCINCPACINST 4630.3. Airlift requests are to be submitted in message format outlined in this pamphlet. If questions arise that require an urgent response, please contact the PAMO staff during duty hours, 1730Z to 0230Z, Mon- Fri, at 449-0775, or contact your service validator. All HQ AMC regulations or instructions are in effect for a period of one year unless superseded or renamed. Supersedes: PACAFP 76-1, 13 September 1990 Certified by: AOS/CC (Lt Col Russell M. Brooker) OPR:AOS/AOP (Capt James E. Smith) Pages: 69/Distribution: F Paragraph Tips for submitting airlift requests ....................................................................................................................................1 -

Module No. 2240 2240-1
Module No. 2240 2240-1 GETTING ACQUAINTED Precautions • Congratulations upon your selection of this CASIO watch. To get the most out The measurement functions built into this watch are not intended for of your purchase, be sure to carefully read this manual and keep it on hand use in taking measurements that require professional or industrial for later reference when necessary. precision. Values produced by this watch should be considered as reasonably accurate representations only. About This Manual • Though a useful navigational tool, a GPS receiver should never be used • Each section of this manual provides basic information you need to perform as a replacement for conventional map and compass techniques. Remember that magnetic compasses can work at temperatures well operations in each mode. Further details and technical information can also be found in the “REFERENCE”. below zero, have no batteries, and are mechanically simple. They are • The term “watch” in this manual refers to the CASIO SATELLITE NAVI easy to operate and understand, and will operate almost anywhere. For Watch (Module No. 2240). these reasons, the magnetic compass should still be your main • The term “Watch Application” in this manual refers to the CASIO navigation tool. • SATELLITE NAVI LINK Software Application. CASIO COMPUTER CO., LTD. assumes no responsibility for any loss, or any claims by third parties that may arise through the use of this watch. Upper display area MODE LIGHT Lower display area MENU On-screen indicators L K • Whenever leaving the AC Adaptor and Interface/Charger Unit SAFETY PRECAUTIONS unattended for long periods, be sure to unplug the AC Adaptor from the wall outlet. -

In Memoriam 1936 - 2016 Mike Was Born in Mumbai
Obituaries Tsering, Street trader, Kathmandu. Rob Fairley, 2000. (Watercolour. 28cm x 20cm. Sketchbook drawing.) 363 I N M E M ORI am 365 Mike Binnie In Memoriam 1936 - 2016 Mike was born in Mumbai. He lived there for nine years until he went to prep school in Scotland. From there, he went on to Uppingham School, and then to Keble College, Oxford, The Alpine Club Obituary Year of Election to read law. While at Keble, Mike (including to ACG) joined its climbing club and was also an active member of the OUMC, Mike Binnie 1978 becoming its president. After going Robert Caukwell 1960 down in 1960, he joined the Oxford Lord Chorley 1951 Andean expedition to Peru, led by Jim Curran 1985 Kim Meldrum. The team completed John Disley 1999 seven first ascents in the remote Colin Drew 1972 Allincapac (now more usually Allin David Duffield ACG 1964, AC 1968 Qhapaq) region, including the high- Chuck Evans 1988 est mountain in the area (5780m). Alan Fisher 1966 After this, Mike took a job as an Robin Garton 2008 instructor at Ullswater Outward Terence Goodfellow 1962 Bound, where he lived with his wife, Denis Greenald ACG 1953, AC 1977 Carol, and their young family for Mike Binnie Dr Tony Jones 1976 two and a half years. Helge Kolrud Asp 2011, 2015 In 1962, he returned to India to take up a post as a teacher at the Yada- Donald Lee Assoc 2007 vindra public school in Patiala, 90 miles north-west of Delhi, and remained Ralph Villiger 2015 there for two years. -

ISO Country Codes
COUNTRY SHORT NAME DESCRIPTION CODE AD Andorra Principality of Andorra AE United Arab Emirates United Arab Emirates AF Afghanistan The Transitional Islamic State of Afghanistan AG Antigua and Barbuda Antigua and Barbuda (includes Redonda Island) AI Anguilla Anguilla AL Albania Republic of Albania AM Armenia Republic of Armenia Netherlands Antilles (includes Bonaire, Curacao, AN Netherlands Antilles Saba, St. Eustatius, and Southern St. Martin) AO Angola Republic of Angola (includes Cabinda) AQ Antarctica Territory south of 60 degrees south latitude AR Argentina Argentine Republic America Samoa (principal island Tutuila and AS American Samoa includes Swain's Island) AT Austria Republic of Austria Australia (includes Lord Howe Island, Macquarie Islands, Ashmore Islands and Cartier Island, and Coral Sea Islands are Australian external AU Australia territories) AW Aruba Aruba AX Aland Islands Aland Islands AZ Azerbaijan Republic of Azerbaijan BA Bosnia and Herzegovina Bosnia and Herzegovina BB Barbados Barbados BD Bangladesh People's Republic of Bangladesh BE Belgium Kingdom of Belgium BF Burkina Faso Burkina Faso BG Bulgaria Republic of Bulgaria BH Bahrain Kingdom of Bahrain BI Burundi Republic of Burundi BJ Benin Republic of Benin BL Saint Barthelemy Saint Barthelemy BM Bermuda Bermuda BN Brunei Darussalam Brunei Darussalam BO Bolivia Republic of Bolivia Federative Republic of Brazil (includes Fernando de Noronha Island, Martim Vaz Islands, and BR Brazil Trindade Island) BS Bahamas Commonwealth of the Bahamas BT Bhutan Kingdom of Bhutan -

Report of the Fifth Meeting of the Surveillance
INTERNATIONAL CIVIL AVIATION ORGANIZATION ASIA AND PACIFIC OFFICE REPORT OF THE FIFTH MEETING OF THE SURVEILLANCE IMPLEMENTATION COORDINATION GROUP (SURICG/5) Web-conference, 22 - 24 September 2020 The views expressed in this Report should be taken as those of the Meetings and not the Organization. Approved by the Meeting and published by the ICAO Asia and Pacific Office, Bangkok SURICG/5 Table of Contents i-2 HISTORY OF THE MEETING Page 1. Introduction ...................................................................................................................................... i-3 2. Opening of the Meeting ................................................................................................................... i-3 3. Attendance ....................................................................................................................................... i-3 4. Officers and Secretariat .................................................................................................................... i-3 5. Organization, working arrangements and language ......................................................................... i-3 6. Draft Conclusions, Draft Decisions and Decision of SURICG - Definition .................................... i-3 REPORT ON AGENDA ITEMS Agenda Item 1: Adoption of Agenda ............................................................................................... 1 Agenda Item 2: Review of outcomes of relevant meetings including ICAO 40th Assembly, DGCA/56 and APANPIRG/30 on Surveillance -

Maintaining Geodetic Control for California
Maintaining California's Geodetic Control System Strategic Assessment Version 1.0 Approved by the California GIS Council: December 14, 2017 Prepared by the California GIS Council's Geodetic Control Work Group Maintaining California's Geodetic Control System Strategic Assessment Geodetic Control Work Group Members CHAIR: Scott P. Martin, PLS – California Department of Transportation Landon Blake, PLS – Hawkins and Associates Engineering John Canas, PLS – California Spatial Reference Center Tom Dougherty, PLS – City of Fremont Kristin Hart, GISP – Padre Associates, Inc. Justin Height, PLS – Guida Surveying Ryan Hunsicker, PLS – GISP – County of San Bernardino Bruce Joffe, GISP – GIS Consultant Neil King, PLS – King and Associates Michael McGee, PLS – Geodetic Consultant Ric Moore, PLS – Public sector Reg Parks, LSIT – Santa Rosa Junior College Mark S. Turner, PLS – California Department of Transportation PAST CHAIR: Marti Ikehara – National Geodetic Survey, California Geodetic Advisor, Retired Acknowledgement The Work Group would like to thank the geospatial professionals who provided peer review of this document. Their valued input was critical to the finalization for delivery to the California GIS Council. Disclaimer Statement The contents of this report reflect the views of the authors who are responsible for the facts and accuracy of the data presented herein. This publication does not constitute a standard, specification or regulation. This report does not constitute an endorsement by any entity, employer or department of any product -

Evaluation of the Accuracy of the New Primary Precise Geodetic Network in Korea
Earth Planets Space, 50, 629–634, 1998 Evaluation of the accuracy of the new Primary Precise Geodetic Network in Korea Jae-Hwa Choi Department of Civil Engineering, Sungkyunkwan University, Korea (Received August 25, 1997; Revised April 23, 1998; Accepted May 21, 1998) Accuracy of the Primary Precise Geodetic Network (PPGN) established during the period of 1975–1994 in Korea is investigated through an analysis of residual from free network adjustment. The PPGN, composed of 1155 points with mean side-length of 11 km, was surveyed by EDM trilateration to revise old triangulation network established in 1910 s. A-posteriori standard deviation of unit weight is 3.8 × 10–6 of the observed length. Most of the estimated error ellipses of horizontal coordinates are nearly circular with a radius <5 cm except those in the marginal part of the network. Mean error of the adjusted coordinates was ±4.5 cm, a value good enough for a geodetic control network of current standard, and as the reference for future crustal deformation studies. 1. Introduction To keep consistency with the old coordinates system, the Geodetic control network not only provides a basic PPGN was adjusted in the way that its official coordinates framework for the survey of nation-wide topographic map, are same as the old ones. Unfortunately, original records of cadastral and civil engineering surveys, but also contributes the old survey are lost during the Korean war, and we only to geodynamics. Establishment of nationwide geodetic have a set of coordinates of triangulation points now. Hence, network in the Korean peninsula was carried out in 1910 s. -

Issn 1198-6727
ISSN 1198-6727 FISHERIES CATCH RECONSTRUCTIONS: ISLANDS, PART IV Fisheries Centre Research Reports 2014 Volume 22 Number 2 ISSN 1198-6727 Fisheries Centre Research Reports 2014 VOLUME 22 NUMBER 2 FISHERIES CATCH RECONSTRUCTIONS: ISLANDS, PART IV Fisheries Centre, University of British Columbia, Canada Edited by Kyrstn Zylich, Dirk Zeller, Melanie Ang and Daniel Pauly Fisheries Centre Research Reports 22(2) 157 pages © published 2014 by The Fisheries Centre, University of British Columbia 2202 Main Mall Vancouver, B.C., Canada, V6T 1Z4 ISSN 1198-6727 Fisheries Centre Research Reports 22(2) 2014 Edited by Kyrstn Zylich, Dirk Zeller, Melanie Ang and Daniel Pauly CONTENT Preface i Reconstruction of total marine fisheries catches for Anguilla (1950 - 2010) 1 Robin Ramdeen, Kyrstn Zylich, and Dirk Zeller Reconstruction of total marine fisheries catches for the British Virgin Islands (1950 - 2010) 9 Robin Ramdeen, Sarah Harper, Kyrstn Zylich, and Dirk Zeller Reconstruction of domestic fisheries catches in the Chagos Archipelago: 1950 - 2010 17 Dirk Zeller and Daniel Pauly Reconstruction of total marine fisheries catches for Cuba (1950 - 2010) 25 Andrea Au, Kyrstn Zylich, and Dirk Zeller Reconstruction of total marine fisheries catches for Dominica (1950 - 2010) 33 Robin Ramdeen, Sarah Harper, and Dirk Zeller Reconstruction of total marine fisheries catches for the Dominican Republic (1950 - 2010) 43 Liesbeth van der Meer, Robin Ramdeen, Kyrstn Zylich, and Dirk Zeller The catch of living marine resources around Greenland from 1950 t0 2010 55 -

Global Seismographic Network Yak Tau Sacv Msvf in Pictures Ccm Qiz Incn Nna Slbs Lco Anmo Hrv Tuc Uln Wci Wvt Tara Sspa Makz Cor Bcip
BORG JTS MA2 GNI ARU SHEL KMBO KURK OBN SJG ADK MIDW PAYG OTAV SNZO BILL ASCN PTGA CASY TSUM WRAB NIL BRVK CMLA HNR TLY RCBR KDAK JOHN AAK TIXI MSKU KAPI RAO PTCN MBAR RPN KIV KWAJ ESK ABKT TEIG LVZ FFC TATO AFI NRIL RAYN LVC HOPE COCO HAI LSA CHTO WAKE SSE QSPA DGAR CTAO MTDJ ENH KBL PALK POHA BFO PET GRGR TRIS GUMO MBWA YSS DWPF TRIS XMAS FUNA KBS KONO KOWA PMG MSEY HNR MACI SDDR ERM PMSA BJT BBSR SDV LSZ COLA WMQ ALE TGUH SAML ANWB EFI XAN KIP PFO SUR MDJ KMI DAV ABPO GLOBAL SEISMOGRAPHIC NETWORK YAK TAU SACV MSVF IN PICTURES CCM QIZ INCN NNA SLBS LCO ANMO HRV TUC ULN WCI WVT TARA SSPA MAKZ COR BCIP PAB GRFO FURI OTAV ANTO KNTN RSSD GRTK RAR HKT MAJO KIEV SFJD SBA BBGH NWAO KEV AAK Ala Archa, Kyrgyzstan BJT Baijiatuan, Beijing, China DWPF Disney Wilderness Preserve Florida, USA HKT Hockley, Texas, USA KMBO Kilima Mbogo, Kenya MAKZ Makanchi, Kazakhstan OTAV Otavalo, Ecuador RAR Rarotonga, Cook Islands SSPA Standing Stone, Pennsylvania, USA VNDA Lake Vanda, Antarctica ABKT Alibek, Turkmenistan BORG Borgarfjordur, Iceland EFI Mount Kent, Falkland Islands HNR Honiara, Solomon Islands KMI Kunming, China MBAR Mbarara, Uganda PAB San Pablo, Spain RAYN Ar Rayn, Saudi Arabia SUR Sutherland, South Africa WAKE Wake Atoll, Pacific, USA ABPO Ambohimpanompo, Madagascar BRVK Borovoye, Kazakhstan ENH Enshi, China HOPE Hope Point, South Georgia Island KNTN Kanton, Republic of Kiribati MBWA Marble Bar, Australia PALK Pallekele, Sri Lanka RCBR Riachuelo, Brazil TARA Tarawa Island, Republic of Kiribati WCI Wyandotte Cave, Indiana, USA ADK Adak Island,