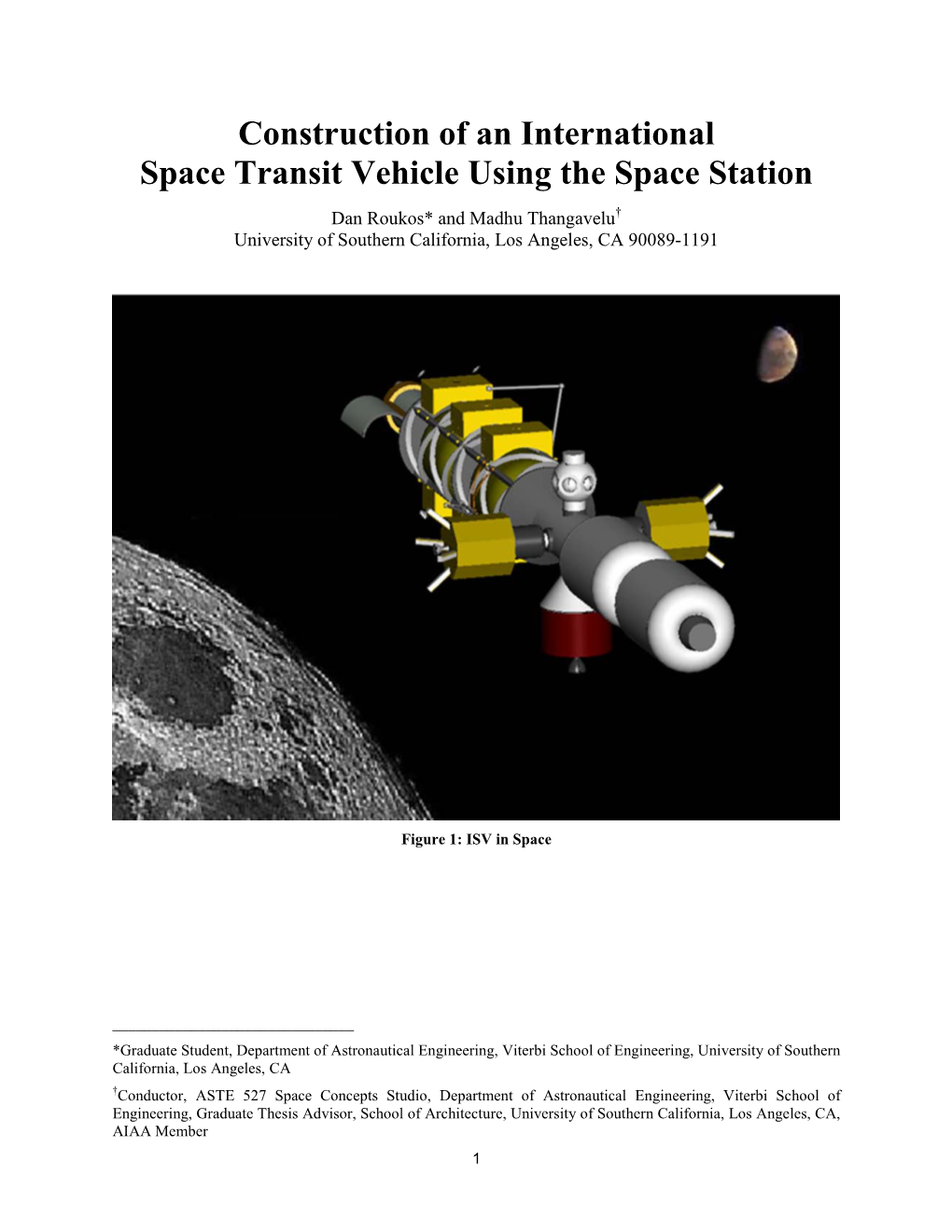
The International Space Transit Vehicle Concept
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Project Selene: AIAA Lunar Base Camp
Project Selene: AIAA Lunar Base Camp AIAA Space Mission System 2019-2020 Virginia Tech Aerospace Engineering Faculty Advisor : Dr. Kevin Shinpaugh Team Members : Olivia Arthur, Bobby Aselford, Michel Becker, Patrick Crandall, Heidi Engebreth, Maedini Jayaprakash, Logan Lark, Nico Ortiz, Matthew Pieczynski, Brendan Ventura Member AIAA Number Member AIAA Number And Signature And Signature Faculty Advisor 25807 Dr. Kevin Shinpaugh Brendan Ventura 1109196 Matthew Pieczynski 936900 Team Lead/Operations Logan Lark 902106 Heidi Engebreth 1109232 Structures & Environment Patrick Crandall 1109193 Olivia Arthur 999589 Power & Thermal Maedini Jayaprakash 1085663 Robert Aselford 1109195 CCDH/Operations Michel Becker 1109194 Nico Ortiz 1109533 Attitude, Trajectory, Orbits and Launch Vehicles Contents 1 Symbols and Acronyms 8 2 Executive Summary 9 3 Preface and Introduction 13 3.1 Project Management . 13 3.2 Problem Definition . 14 3.2.1 Background and Motivation . 14 3.2.2 RFP and Description . 14 3.2.3 Project Scope . 15 3.2.4 Disciplines . 15 3.2.5 Societal Sectors . 15 3.2.6 Assumptions . 16 3.2.7 Relevant Capital and Resources . 16 4 Value System Design 17 4.1 Introduction . 17 4.2 Analytical Hierarchical Process . 17 4.2.1 Longevity . 18 4.2.2 Expandability . 19 4.2.3 Scientific Return . 19 4.2.4 Risk . 20 4.2.5 Cost . 21 5 Initial Concept of Operations 21 5.1 Orbital Analysis . 22 5.2 Launch Vehicles . 22 6 Habitat Location 25 6.1 Introduction . 25 6.2 Region Selection . 25 6.3 Locations of Interest . 26 6.4 Eliminated Locations . 26 6.5 Remaining Locations . 27 6.6 Chosen Location . -

The “Farm:” an Inflatable Centrifuge Biology Research Module on the International Space Station
The “Farm:” An Inflatable Centrifuge Biology Research Module on the International Space Station M.Thangavelu1, L. Simurda2 As the sole manned laboratory in Low Earth Orbit, permanently operating in microgravity and largely unprotected by the Earth's atmosphere, the International Space Station serves as an unparalleled platform for studying the effects of low or zero-gravity and the space radiation environment on biological systems as well as developing, testing and certifying sturdy and reliable systems for long duration missions such as ambitious interplanetary expeditions planned for the future. Earth- bound research, automated research aboard satellites and short missions into low- altitude orbits cannot replicate long-term ISS experiments. Abandoning or de- orbiting the station, even in 2020, leaves the international scientific and engineering community bereft of a manned station in orbit and destroys any opportunity for conducting long-term microgravity and radiation experiments requiring human oversight in space. The United States should invest in extending the station's life by a minimum of 15 years from present by attaching an inflatable "Farm" centrifuge module to equip biologists, psychologists and engineers with the tools required to investigate these questions and more. At a time when humankind has only begun exploring the effects of the space environment on biological systems, it is essential that we not abandon the only empirical research facility in operation today and instead begin vigorously pursuing research in this area that is of vital importance to all humanity, not only in the basic and applied sciences but also in international collaboration. I. Introduction In June 2010, President Barack Obama announced a novel vision for NASA and proposed extending the life of the International Space Station (ISS) until at least 2020. -

The Annual Compendium of Commercial Space Transportation: 2012
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2012 February 2013 About FAA About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2013) NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. • i • Federal Aviation Administration’s Office of Commercial Space Transportation Dear Colleague, 2012 was a very active year for the entire commercial space industry. In addition to all of the dramatic space transportation events, including the first-ever commercial mission flown to and from the International Space Station, the year was also a very busy one from the government’s perspective. It is clear that the level and pace of activity is beginning to increase significantly. -

19940015753.Pdf
National Aeronautics and Educational Product Space Administration Teachers I Grades 2-6 I Office of Education and Human Resources Education Division _o N N cO 0 u_ 0 N t_ I ,.-, CO ,4" U O" 0_ _ Z _ 0 0 tM < u Is LIJ I-. _-.q4" W_ O ul ,,_ W;Z. INWel I I,,-. UJ .... 0,. i,-,{ .... u4 uJ I-,- .. IU_ Z_ .1 i ! I i I j | ] ROCKETS Physical Science Teacher's Guide with Activities National Aeronautics and Space Administration Office of Human Resources and Education Education Division This publication is in the Public Domain and is not protected by copyright. Permission is not required for duplication. EP-291 July 1993 Acknowledgments This publication was developed for the National Aeronautics and Space Administra- tion with the assistance of the many educa- tors of the Aerospace Education Services Program, Oklahoma State University. Writer: Gregory L. Vogt, Ed.D. Teaching From Space Program NASA Johnson Space Center Houston, TX Editor: Carla R. Rosenberg Teaching From Space Program NASA Headquarters Washington, DC Table of Contents How To Use This Guide ............................... 1 Activities and Demonstration Matrix ............. 2 Brief History of Rockets ................................ 3 Rocket Principles ......................................... 8 Practical Rocketry ...................................... 12 Activities and Demonstrations .................... 19 Glossary ..................................................... 40 NASA Educational Materials And Suggested Readings .......................... 41 NASA Educational Resources ................... 42 Evaluation Card ..................................... Insert ii How To Use This Guide vehiclesockets arein theexistence.oldest formEarlyofrocketsself-containedwere in use more than two thousand years ago. Over a long and exciting history, rockets have evolved from simple tubes filled with black powder into mighty vehicles capable of launching a spacecraft out into the galaxy. -

Deployable Modular Frame for Inflatable Space Habitats
70th International Astronautical Congress (IAC), Washington D.C., United States, 21-25 October 2019. Copyright ©2019 by the International Astronautical Federation (IAF). All rights reserved. IAC-19,B3,8-GTS.2,4,x48931 DMF: Deployable Modular Frame for Inflatable Space Habitats Vittorio Netti1, * 1University of Houston, [email protected] *Corresponding author Abstract Inflatable Space Modules for space exploration are now a reality. In 2016, Bigelow Aerospace tested the first inflatable module Bigelow Expandable Activity Module (BEAM) on the International Space Station (ISS), achieving success. This technology has higher volume limits than other launchers, substantially changing the previous concepts of construction and life in space. Nevertheless, inflatable modules technology lacks a reliable and functional platform to efficiently use all this space. Due to its limited dimension, the International Standard Payload Rack (ISPR), currently used on ISS, is not suitable for this purpose. The project aims at developing a new standard for payload rack in the inflatable space modules: the Deployable Modular Frame (DMF). The DMF expands itself radially from the center of the module, starting from four structural pylons. It creates a solid infrastructure allowing for the configuration of a variety of spaces, including storage space, laboratories, workstations and living quarters. The DMF consists of two main parts: the Deployable Frame (DF) and the Modular Rack (MR). Once the frame is deployed, it provides four linear slots suitable to install the modular racks. The rack is the basic element that allows for the storage of equipment inside the frame. Once they are installed, the racks can slide on the frame’s rails, dynamically changing the space inside the module. -

MASTER's THESIS Space Radiation Analysis
2009:107 MASTER'S THESIS Space Radiation Analysis - Radiation Effects and Particle Interaction outside Earth Magnetosphere using GRAS and GEANT4 Lisandro Martinez Luleå University of Technology Master Thesis, Continuation Courses Space Science and Technology Department of Space Science, Kiruna 2009:107 - ISSN: 1653-0187 - ISRN: LTU-PB-EX--09/107--SE Space Radiation Analysis: Radiation Effects and Particle Interaction outside Earth Magnetosphere using GRAS and GEANT4 Master’s Thesis For the degree of Master of Science in Space Science and Technology Lisandro M. Martinez Luleå University of Technology Cranfield University June 2009 Supervisor: Johnny Ejemalm Luleå University of Technology June 12, 2009 MASTER’S THESIS ABSTRACT Detailed analyses of galactic cosmic rays (GCR), solar proton events (SPE), and solar fluence effects have been conducted using SPENVIS and CREME96 data files for particle flux outside the Earth’s magnetosphere. The simulation was conducted using GRAS, a European Space Agency (ESA) software based on GEANT4. Dose, dose equivalent and equivalent dose have been calculated as well as secondary particle effects and GCR energy spectrum. The results are based on geometrical models created to represent the International Space Station (ISS) structure and the TransHab structure. The physics models used are included in GEANT4 and validation was conducted to validate the data. The Bertini cascade model was used to simulate the hadronic reactions as well as the GRAS standard electromagnetic package to simulate the electromagnetic effects. The calculated total dose effects, equivalent dose and dose equivalent indicate the risk and effects that space radiation could have on the crew, large amounts of radiation are expected to be obtained by the crew according to the results. -

Water Walls Architecture: Massively Redundant and Highly Reliable Life Support for Long Duration Exploration Missions
WATER WALLS ARCHITECTURE: MASSIVELY REDUNDANT AND HIGHLY RELIABLE LIFE SUPPORT FOR LONG DURATION EXPLORATION MISSIONS Michael T. Flynn, Principal Investigator, NASA Ames Research Center Co-Investigator Team Dr. Marc M. Cohen, Arch.D, Astrotecture™, Renee L. Matossian, Space Architect, Astrotecture™, Dr. Sherwin Gormly, PhD, Desert Toad LLC, Dr. Rocco Mancinelli, PhD, Bay Area Environmental Research Institute Dr. Jack Miller, PhD, Consultant Jurek Parodi and Elysse Grossi, Universities Space Research Association 1 1. Abstract ............................................................................................................................ 4 2. Introduction ...................................................................................................................... 4 2.1 Long Duration Life Support ........................................................................................... 5 2.1.1 A New Approach ................................................................................................................. 5 2.1.2 Limitations of the Current Approaches ................................................................................ 5 2.1.3 Key to Success: Incrementally Consuming the System - Not Driving it to Failure................. 6 2.2 Background .................................................................................................................... 6 2.3 Water Walls and Spacecraft Arcbitecture..................................................................... 9 3. System-Integration Challenge -

Bigelow Aerospace
Board Summary Bigelow Aerospace Date: July 11, 2018 1899 West Brooks Avenue, North Las Vegas, NV 89032 Main Location: Carson City Blair Bigelow, Vice President of Corporate Strategy Aerospace Manufacturing Business Type: Expansion County: Clark County Development Authority Representative: Kylie Rowe - LVGEA APPLICATION HIGHLIGHTS - Bigelow Aerospace is considering expanding its current operations in North Las Vegas. - The expansion would accommodate the company's new project: the development and manufacture of Bigelow Aerospace's flagship spacecraft, the B330, an entirely autonomous platform outfitted with two dissimilar propulsion systems and entire suite of environmental life support systems. - The B330 is the only spacecraft of its kind being developed in the world. PROFILE Bigelow Aerospace is an American space technology company that manufactures and develops expandable space station modules. These NASA heritage systems are soft-bodied modules that launch in a compressed configuration but expand greatly once they reach space. Such inflatables provide for greater volume, safety, opportunity, and economy than the aluminum alternatives. Bigelow Aerospace's newest product, the B330, is a fully autonomous stand-alone space station which is complemented with a complete suite of life support systems, launches at 1/3 of the expanded size, provides 330 cubic meters of internal volume, and houses up to six crew memembers. To date the company has successfully launched two subscale spacecraft called Genesis I & II into orbit as well as the Bigelow Expandable Activity Module (BEAM), which is attached to the Tranquility module of the International Space Station. In October 2006, Bigelow Aerospace received the Innovator Award from the Arthur C. Clarke Foundation. -

Transhab Inflatable Habitat Kriss J. Kennedy Space Architect
https://ntrs.nasa.gov/search.jsp?R=20160011581 2019-08-29T16:29:50+00:00Z University of Houston SPACE ARCHITECTURE Case Study: TransHab Inflatable Habitat Kriss J. Kennedy Space Architect September 28, 2016 1 TransHAB Inflatable Prototype Module Space Architecture 2 NASA TransHab Concept • TransHab was a light weight inflatable habitation module for space applications • Original 1997 concept for light weight habitat module for human mission transit to Mars • Proposed to the International Space Station (ISS) Program as a replacement for a Hab Module 3 TransHab (Inflatable Space Habitat) DESIGNED 1997 4 Transportation Constraints Inflated TransHab TransHab Launch Package Robotic Arm Removal & Installation on ISS 5 Node 1 U.S. LAB Node 3 Nadir ISS TransHAB TransHAB on the ISS 6 ISS TransHAB Level 4: Pressurized Tunnel ISS TransHAB Functions • Private Crew Quarters • Galley & Dining Level 3: Crew • Meeting area for entire ISS crew Health Care • Health Care & Exercise • Hygiene • Stowage Level 2: Crew Quarters & • Crew Accommodations Mechanical Room • Environmental Control & Life Support System (ECLSS) • Communications Level 1: Galley & • Command, Control & Data Handling Wardroom • Protection during Solar Particle Events 7 ISS TransHab Architecture Hatch Door Inflatable Shell Level 4: Pressurized Central Structural Tunnel Core 20” Window (2) Ergometer Level 3: Crew Health Treadmill Care Inflatable Outfitting Compression Ring Integrated Water Level 2: Crew Quarters Tank and Mechanical Room Soft Stowage Array Level 1: Galley and Wardroom Wardroom Table 8 Level 1 zenith Leave Floor Open for Return Air to Mech Integrated Floor Strut into Rm. Above Fabric Floor Above SOFT STOWAGE LEVEL 1 ISS RACK HAND GALLEY WASH UTILITY UTILITY CHASE 'A' CHASE 'B' 62" PASS THRU aft ISS RACK PASS THRU ISS RACK ABOVE forward REFRIG/ ABOVE REFRIG/ FREEZER FREEZER #1 #2 ISS RACK GALLEY WARDROOM window nadir 9 Galley / Wardroom Area zenith Leave Floor Open for Return Air to Mech SOFT STOWAGE Integrated Floor Strut into Rm. -

Outer Space the Moon Mars Earth Gravity Radiation Primary Atmosphere Temperature
Introduction Abstract Introduction Isolated, confined, and extreme (ICE) environments exist as the inhabited areas of the Isolated, confined, and extreme (ICE) environments are the most universally challenging Earth or the space above it that pose the greatest challenges to human health. Individuals places in which anyone could attempt to survive, but can provide enormous scientific and can survive in these places, but the environments present inherently challenging conditions economic benefits for those who do live and work within them. The harsh environmental that make survival difficult or even dangerous. The most familiar extreme environments are conditions and psychological difficulties experienced within ICE environments currently limits considered the open desert, the ocean, and the poles. These are areas with harsh weather the amount of time individuals can spend at Earth’s poles, at sea, or in space to roughly and almost no potable water, and they offer very little in terms of shelter. a year. Enabling humans to survive for a longer duration while remaining physically and The most immediate threats are physical in the form of environmental conditions psychologically healthy is the central goal of architecture for ICE environments. or the vacuum of space, which could prove lethal. Drilling platforms must deal with high These environments offer access to resources such as oil and gas and enable seas and polar research stations must allow for survival through long winters without unique scientific exploration and discovery. Addressing the difficulties those living in outside assistance. The necessity of dealing with one’s physical environment is paramount; ICE environments face will increase overall productivity and health. -

22 May 2002, ESA/ESTEC, Noordwijk, the Netherlands
Modular Inflatable Space Habitats First European Workshop on Inflatable Space Structures 21 – 22 May 2002, ESA/ESTEC, Noordwijk, The Netherlands Andreas Vogler, dipl. Arch ETH(1) (1)University of Technology Munich Arcisstrasse 21 D-80290 Munich, Germany Email:[email protected] ABSTRACT In space we find an extreem vacuum. Human beings need an atmosphere to survive. This makes inflatables most apt for use in human space flight. Savings in weight and packaging volume are perfect for getting them off ground. With the development of TransHab, NASA made a big step forward in proofing the technology-readiness of using inflatables for human space habitat. Protection of micro-meteorites and radiation proofed to be even better than in the aluminium ISS Module. The shape of TransHab was based on a toroid. The sphere is the natural shape of a flexible skin with an inside pressure and naturally combining maximum volume with minimum surface (insulation/protection etc). It is astonishing why this very efficient shape has not been used more often for space applications. This paper will investigate on a concept level the possibilities of a sphere for use in microgravity and planetary habitats. Possibilities for habitats for 1-2 person, 6 persons and up to sixty and more, all using the same basic standard modules and morphology. Even a whole self-sufficient space station with artificial gravity where the big structure resembles - like in a fractal system - the smallest unit will be proposed. INTRODUCTION Inflatable structures have always been a obvious alternative for space structures, since they combine stability with a high volume/weight ratio. -

Howard Seifert Papers
http://oac.cdlib.org/findaid/ark:/13030/tf0z09n4j4 No online items Guide to the Howard Seifert Papers Daniel Hartwig Stanford University. Libraries.Department of Special Collections and University Archives Stanford, California 2001 Copyright © 2015 The Board of Trustees of the Leland Stanford Junior University. All rights reserved. Note This encoded finding aid is compliant with Stanford EAD Best Practice Guidelines, Version 1.0. Guide to the Howard Seifert SC0173 1 Papers Overview Call Number: SC0173 Creator: Seifert, Howard, 1911-1977 Creator: Seifert,, 1911-1977. Title: Howard Seifert papers Dates: 1960-1977 Physical Description: 39.5 Linear feet Language(s): The materials are in English. Repository: Department of Special Collections and University Archives Green Library 557 Escondido Mall Stanford, CA 94305-6064 Email: [email protected] Phone: (650) 725-1022 URL: http://library.stanford.edu/spc Custodial History Gift of Mrs. Howard Seifert, 1977, and administrative transfer, Department of Aeronautics and Astronautics, 1979. Information about Access None. Ownership & Copyright Property rights reside with the repository. Literary rights reside with the creators of the documents or their heirs. To obtain permission to publish or reproduce, please contact the Public Services Librarian of the Dept. of Special Collections and University Archives. Cite As [Identification of item], Howard Seifert Papers, SC 173, Stanford University Archives, Stanford, Calif. Biography Howard Seifert, an authority on rocket propulsion of space vehicles, was professor of aeronautics and astronautics at Stanford from 1960 to 1976. He also directed the Physical Sciences Laboratory at the United Aircraft Corporation (1960-65) and was president of the American Rocket Society (1960). Before joining the Stanford faculty, he was on the staff at the Jet Propulsion Laboratory and Space Technology Laboratories and a visiting professor at UCLA.