Eulerian Circuits and Path Decompositions in Quartic Planar Graphs
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Tutorial 13 Travelling Salesman Problem1
MTAT.03.286: Design and Analysis of Algorithms University of Tartu Tutorial 13 Instructor: Vitaly Skachek; Assistants: Behzad Abdolmaleki, Oliver-Matis Lill, Eldho Thomas. Travelling Salesman Problem1 Basic algorithm Definition 1 A Hamiltonian cycle in a graph is a simple circuit that passes through each vertex exactly once. + Problem. Let G(V; E) be a complete undirected graph, and c : E 7! R be a cost function defined on the edges. Find a minimum cost Hamiltonian cycle in G. This problem is called a travelling salesman problem. To illustrate the motivation, imagine that a salesman has a list of towns it should visit (and at the end to return to his home city), and a map, where there is a certain distance between any two towns. The salesman wants to minimize the total distance traveled. Definition 2 We say that the cost function defined on the edges satisfies a triangle inequality if for any three edges fu; vg, fu; wg and fv; wg in E it holds: c (fu; vg) + c (fv; wg) ≥ c (fu; wg) : In what follows we assume that the cost function c satisfies the triangle inequality. The main idea of the algorithm: Observe that removing an edge from the optimal travelling salesman tour leaves a path through all vertices, which contains a spanning tree. We have the following relations: cost(TSP) ≥ cost(Hamiltonian path without an edge) ≥ cost(MST) : 1Additional reading: Section 3 in the book of V.V. Vazirani \Approximation Algorithms". 1 Next, we describe how to build a travelling salesman path. Find a minimum spanning tree in the graph. -
Parental Testing in Graph Theory?
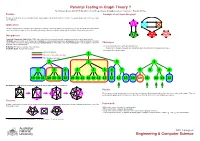
Parental Testing in Graph Theory ? By S Narjess Afzaly,∗ ANU CSIT Algorithm & Data Group, [email protected]. Supervisor: Brendan McKay.∗ Problem A sample of an irreducible graph To make a complete list of non-isomorphic simple quartic graphs with the given number of vertices. In a quartic graph, each vertex has exactly four neighbours. Applications Finding counterexamples, verifying some conjectures or refining some proofs whether in graph theory or in any other field where the problem can be modelled as a graph such as: chemistry, web mining, national security, the railway map, the electrical circuit and neural science. Our approach Canonical Construction Path (McKay 1998): A general method to recursively generate combinatorial objects in which larger objects, (Children), are constructed out of smaller ones, (Parents), by some well-defined operation, (extension), and avoiding constructing isomorphic copies at each construction step by defining a unique genuine parent for each graph. Hence a generated graph is only accepted if it has been Challenges extended from its genuine parent. • To avoid isomorphic copies when generating the list: Reduction: The inverse operation of the extension. Irreducible graph: A graph with no parent. The definition of the genuine parent can substantially affect the efficiency of the generation process. • Generating all irreducible graphs. Genuine parent 1 Has an isomorphic sibling Not genuine parent 2 2 3 4 5 5 6 5 5 6 6 7 5 8 9 6 10 10 11 10 10 11 12 10 10 11 10 10 11 12 12 12 13 10 10 11 10 13 12 Our Reduction: Deleting a vertex and adding two extra disjoint edges between its neighbours. -
Lecture 9. Basic Problems of Graph Theory
Lecture 9. Basic Problems of Graph Theory. 1 / 28 Problem of the Seven Bridges of Königsberg Denition An Eulerian path in a multigraph G is a path which contains each edge of G exactly once. If the Eulerian path is closed, then it is called an Euler cycle. If a multigraph contains an Euler cycle, then is called a Eulerian graph. Example Consider graphs z z z y y y w w w t t x x t x a) b) c) in case a the multigraph has an Eulerian cycle, in case b the multigraph has an Eulerian trail, in case c the multigraph hasn't an Eulerian cycle or an Eulerian trail. 2 / 28 Problem of the Seven Bridges of Königsberg In Königsberg, there are two islands A and B on the river Pregola. They are connected each other and with shores C and D by seven bridges. You must set o from any part of the city land: A; B; C or D, go through each of the bridges exactly once and return to the starting point. In 1736 this problem had been solved by the Swiss mathematician Leonhard Euler (1707-1783). He built a graph representing this problem. Shore C River Island A Island B Shore D Leonard Euler answered the important question for citizens "has the resulting graph a closed walk, which contains all edges only once?" Of course the answer was negative. 3 / 28 Problem of the Seven Bridges of Königsberg Theorem Let G be a connected multigraph. G is Eulerian if and only if each vertex of G has even degree. -

582670 Algorithms for Bioinformatics
582670 Algorithms for Bioinformatics Lecture 5: Graph Algorithms and DNA Sequencing 27.9.2012 Adapted from slides by Veli M¨akinen/ Algorithms for Bioinformatics 2011 which are partly from http://bix.ucsd.edu/bioalgorithms/slides.php DNA Sequencing: History Sanger method (1977): Gilbert method (1977): I Labeled ddNTPs terminate I Chemical method to cleave DNA copying at random DNA at specific points (G, points. G+A, T+C, C). I Both methods generate labeled fragments of varying lengths that are further measured by electrophoresis. Sanger Method: Generating a Read 1. Divide sample into four. 2. Each sample will have available all normal nucleotides and modified nucleotides of one type (A, C, G or T) that will terminate DNA strand elongation. 3. Start at primer (restriction site). 4. Grow DNA chain. 5. In each sample the reaction will stop at all points ending with the modified nucleotide. 6. Separate products by length using gel electrophoresis. Sanger Method: Generating a Read DNA Sequencing I Shear DNA into millions of small fragments. I Read 500-700 nucleotides at a time from the small fragments (Sanger method) Fragment Assembly I Computational Challenge: assemble individual short fragments (reads) into a single genomic sequence (\superstring") I Until late 1990s the shotgun fragment assembly of human genome was viewed as intractable problem I Now there exists \complete" sequences of human genomes of several individuals I For small and \easy" genomes, such as bacterial genomes, fragment assembly is tractable with many software tools I Remains -
Graph Algorithms in Bioinformatics an Introduction to Bioinformatics Algorithms Outline
An Introduction to Bioinformatics Algorithms www.bioalgorithms.info Graph Algorithms in Bioinformatics An Introduction to Bioinformatics Algorithms www.bioalgorithms.info Outline 1. Introduction to Graph Theory 2. The Hamiltonian & Eulerian Cycle Problems 3. Basic Biological Applications of Graph Theory 4. DNA Sequencing 5. Shortest Superstring & Traveling Salesman Problems 6. Sequencing by Hybridization 7. Fragment Assembly & Repeats in DNA 8. Fragment Assembly Algorithms An Introduction to Bioinformatics Algorithms www.bioalgorithms.info Section 1: Introduction to Graph Theory An Introduction to Bioinformatics Algorithms www.bioalgorithms.info Knight Tours • Knight Tour Problem: Given an 8 x 8 chessboard, is it possible to find a path for a knight that visits every square exactly once and returns to its starting square? • Note: In chess, a knight may move only by jumping two spaces in one direction, followed by a jump one space in a perpendicular direction. http://www.chess-poster.com/english/laws_of_chess.htm An Introduction to Bioinformatics Algorithms www.bioalgorithms.info 9th Century: Knight Tours Discovered An Introduction to Bioinformatics Algorithms www.bioalgorithms.info 18th Century: N x N Knight Tour Problem • 1759: Berlin Academy of Sciences proposes a 4000 francs prize for the solution of the more general problem of finding a knight tour on an N x N chessboard. • 1766: The problem is solved by Leonhard Euler (pronounced “Oiler”). • The prize was never awarded since Euler was Director of Mathematics at Berlin Academy and was deemed ineligible. Leonhard Euler http://commons.wikimedia.org/wiki/File:Leonhard_Euler_by_Handmann.png An Introduction to Bioinformatics Algorithms www.bioalgorithms.info Introduction to Graph Theory • A graph is a collection (V, E) of two sets: • V is simply a set of objects, which we call the vertices of G. -

On Hamiltonian Line-Graphsq
ON HAMILTONIANLINE-GRAPHSQ BY GARY CHARTRAND Introduction. The line-graph L(G) of a nonempty graph G is the graph whose point set can be put in one-to-one correspondence with the line set of G in such a way that two points of L(G) are adjacent if and only if the corresponding lines of G are adjacent. In this paper graphs whose line-graphs are eulerian or hamiltonian are investigated and characterizations of these graphs are given. Furthermore, neces- sary and sufficient conditions are presented for iterated line-graphs to be eulerian or hamiltonian. It is shown that for any connected graph G which is not a path, there exists an iterated line-graph of G which is hamiltonian. Some elementary results on line-graphs. In the course of the article, it will be necessary to refer to several basic facts concerning line-graphs. In this section these results are presented. All the proofs are straightforward and are therefore omitted. In addition a few definitions are given. If x is a Une of a graph G joining the points u and v, written x=uv, then we define the degree of x by deg zz+deg v—2. We note that if w ' the point of L(G) which corresponds to the line x, then the degree of w in L(G) equals the degree of x in G. A point or line is called odd or even depending on whether it has odd or even degree. If G is a connected graph having at least one line, then L(G) is also a connected graph. -

Fast Generation of Planar Graphs (Expanded Version)
Fast generation of planar graphs (expanded version) Gunnar Brinkmann∗ Brendan D. McKay† Department of Applied Mathematics Department of Computer Science and Computer Science Australian National University Ghent University Canberra ACT 0200, Australia B-9000 Ghent, Belgium [email protected] [email protected] Abstract The program plantri is the fastest isomorph-free generator of many classes of planar graphs, including triangulations, quadrangulations, and convex polytopes. Many applications in the natural sciences as well as in mathematics have appeared. This paper describes plantri’s principles of operation, the basis for its efficiency, and the recursive algorithms behind many of its capabilities. In addition, we give many counts of isomorphism classes of planar graphs compiled using plantri. These include triangulations, quadrangulations, convex polytopes, several classes of cubic and quartic graphs, and triangulations of disks. This paper is an expanded version of the paper “Fast generation of planar graphs” to appeared in MATCH. The difference is that this version has substantially more tables. 1 Introduction The program plantri can rapidly generate many classes of graphs embedded in the plane. Since it was first made available, plantri has been used as a tool for research of many types. We give only a partial list, beginning with masters theses [37, 40] and PhD theses [32, 42]. Applications have appeared in chemistry [8, 21, 28, 39, 44], in crystallography [19], in physics [25], and in various areas of mathematics [1, 2, 7, 20, 22, 24, 41]. ∗Research supported in part by the Australian National University. †Research supported by the Australian Research Council. 1 The purpose of this paper is to describe the facilities of plantri and to explain in general terms the method of operation. -
Path Finding in Graphs
Path Finding in Graphs Problem Set #2 will be posted by tonight 1 From Last Time Two graphs representing 5-mers from the sequence "GACGGCGGCGCACGGCGCAA" Hamiltonian Path: Eulerian Path: Each k-mer is a vertex. Find a path that Each k-mer is an edge. Find a path that passes through every vertex of this graph passes through every edge of this graph exactly once. exactly once. 2 De Bruijn's Problem Nicolaas de Bruijn Minimal Superstring Problem: (1918-2012) k Find the shortest sequence that contains all |Σ| strings of length k from the alphabet Σ as a substring. Example: All strings of length 3 from the alphabet {'0','1'}. A dutch mathematician noted for his many contributions in the fields of graph theory, number theory, combinatorics and logic. He solved this problem by mapping it to a graph. Note, this particular problem leads to cyclic sequence. 3 De Bruijn's Graphs Minimal Superstrings can be constructed by finding a Or, equivalently, a Eulerian cycle of a Hamiltonian path of an k-dimensional De Bruijn (k−1)-dimensional De Bruijn graph. Here edges k graph. Defined as a graph with |Σ| nodes and edges represent the k-length substrings. from nodes whose k − 1 suffix matches a node's k − 1 prefix 4 Solving Graph Problems on a Computer Graph Representations An example graph: An Adjacency Matrix: Adjacency Lists: A B C D E Edge = [(0,1), (0,4), (1,2), (1,3), A 0 1 0 0 1 (2,0), B 0 0 1 1 0 (3,0), C 1 0 0 0 0 (4,1), (4,2), (4,3)] D 1 0 0 0 0 An array or list of vertex pairs (i,j) E 0 1 1 1 0 indicating an edge from the ith vertex to the jth vertex. -

Eulerian and Hamiltonian Paths
Eulerian and Hamiltonian Paths 1. Euler paths and circuits 1.1. The Könisberg Bridge Problem Könisberg was a town in Prussia, divided in four land regions by the river Pregel. The regions were connected with seven bridges as shown in figure 1(a). The problem is to find a tour through the town that crosses each bridge exactly once. Leonhard Euler gave a formal solution for the problem and –as it is believed- established the graph theory field in mathematics. (a) (b) Figure 1: The bridges of Könisberg (a) and corresponding graph (b) 1.2. Defining Euler paths Obviously, the problem is equivalent with that of finding a path in the graph of figure 1(b) such that it crosses each edge exactly one time. Instead of an exhaustive search of every path, Euler found out a very simple criterion for checking the existence of such paths in a graph. As a result, paths with this property took his name. Definition 1: An Euler path is a path that crosses each edge of the graph exactly once. If the path is closed, we have an Euler circuit. In order to proceed to Euler’s theorem for checking the existence of Euler paths, we define the notion of a vertex’s degree. Definition 2: The degree of a vertex u in a graph equals to the number of edges attached to vertex u. A loop contributes 2 to its vertex’s degree. 1.3. Checking the existence of an Euler path The existence of an Euler path in a graph is directly related to the degrees of the graph’s vertices. -

Smallest Cubic and Quartic Graphs with a Given Number of Cutpoints and Bridges Gary Chartrand
Old Dominion University ODU Digital Commons Mathematics & Statistics Faculty Publications Mathematics & Statistics 1982 Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges Gary Chartrand Farrokh Saba John K. Cooper Jr. Frank Harary Curtiss E. Wall Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/mathstat_fac_pubs Part of the Mathematics Commons Repository Citation Chartrand, Gary; Saba, Farrokh; Cooper, John K. Jr.; Harary, Frank; and Wall, Curtiss E., "Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges" (1982). Mathematics & Statistics Faculty Publications. 76. https://digitalcommons.odu.edu/mathstat_fac_pubs/76 Original Publication Citation Chartrand, G., Saba, F., Cooper, J. K., Harary, F., & Wall, C. E. (1982). Smallest cubic and quartic graphs with a given number of cutpoints and bridges. International Journal of Mathematics and Mathematical Sciences, 5(1), 41-48. doi:10.1155/s0161171282000052 This Article is brought to you for free and open access by the Mathematics & Statistics at ODU Digital Commons. It has been accepted for inclusion in Mathematics & Statistics Faculty Publications by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. I nternat. J. Math. & Math. Sci. Vol. 5 No. (1982)41-48 41 SMALLEST CUBIC AND QUARTIC GRAPHS WITH A GIVEN NUMBER OF CUTPOINTS AND BRIDGES GARY CHARTRAND and FARROKH SABA Department of Mathematics, Western Michigan University Kalamazoo, Michigan 49008 U. S .A. JOHN K. COOPER, JR. Department of Mathematics, Eastern Michigan University Ypsilanti, Michigan 48197 U.S.A. FRANK HARARY Department of Mathematics, University of Michigan Ann Arbor, Michigan 48104 U.S.A. -

Combinatorics
Combinatorics Introduction to graph theory Misha Lavrov ARML Practice 11/03/2013 Warm-up 1. How many (unordered) poker hands contain 3 or more aces? 2. 10-digit ISBN codes end in a \check digit": a number 0{9 or the letter X, calculated from the other 9 digits. If a typo is made in a single digit of the code, this can be detected by checking this calculation. Prove that a check digit in the range 1{9 couldn't achieve this goal. 16 3. There are 8 ways to go from (0; 0) to (8; 8) in steps of (0; +1) or (+1; 0). (Do you remember why?) How many of these paths avoid (2; 2), (4; 4), and (6; 6)? You don't have to simplify the expression you get. Warm-up Solutions 4 48 4 48 1. There are 3 · 2 hands with 3 aces, and 4 · 1 hands with 4 aces, for a total of 4560. 2. There are 109 possible ISBN codes (9 digits, which uniquely determine the check digit). If the last digit were in the range 1{9, there would be 9 · 108 possibilities for the last 9 digits. By pigeonhole, two ISBN codes would agree on the last 9 digits, so they'd only differ in the first digit, and an error in that digit couldn't be detected. 3. We use the inclusion-exclusion principle. (Note that there are, 4 12 e.g., 2 · 6 paths from (0; 0) to (8; 8) through (2; 2).) This gives us 16 412 82 428 44 − 2 − + 3 − = 3146: 8 2 6 4 2 4 2 Graphs Definitions A graph is a set of vertices, some of which are joined by edges. -

Distance-Two Colorings of Barnette Graphs
CCCG 2018, Winnipeg, Canada, August 8{10, 2018 Distance-Two Colorings of Barnette Graphs Tom´asFeder∗ Pavol Helly Carlos Subiz Abstract that the conjectures hold on the intersection of the two classes, i.e., that tri-connected cubic planar graphs with Barnette identified two interesting classes of cubic poly- all face sizes 4 or 6 are Hamiltonian. When all faces hedral graphs for which he conjectured the existence of have sizes 5 or 6, this was a longstanding open prob- a Hamiltonian cycle. Goodey proved the conjecture for lem, especially since these graphs (tri-connected cubic the intersection of the two classes. We examine these planar graphs with all face sizes 5 or 6) are the popu- classes from the point of view of distance-two color- lar fullerene graphs [8]. The second conjecture has now ings. A distance-two r-coloring of a graph G is an as- been affirmatively resolved in full [18]. For the first con- signment of r colors to the vertices of G so that any jecture, two of the present authors have shown in [10] two vertices at distance at most two have different col- that if the conjecture is false, then the Hamiltonicity ors. Note that a cubic graph needs at least four colors. problem for tri-connected cubic planar graphs is NP- The distance-two four-coloring problem for cubic planar complete. In view of these results and conjectures, in graphs is known to be NP-complete. We claim the prob- this paper we call bipartite tri-connected cubic planar lem remains NP-complete for tri-connected bipartite graphs type-one Barnette graphs; we call cubic plane cubic planar graphs, which we call type-one Barnette graphs with all face sizes 3; 4; 5 or 6 type-two Barnette graphs, since they are the first class identified by Bar- graphs; and finally we call cubic plane graphs with all nette.