Marine Observations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Storm Wind Loads on Trees Thought by the Author to Provide the Best Means for Considering Fundamental Tree Health Care Issues Surrounding Tree Biomechanics
TreesTreesTrees &&& StormStormStorm WindWindWind LoadsLoadsLoads by Dr. Kim D. Coder Professor of Tree Biology & Health Care Warnell School of Forestry & Natural Resources, University of Georgia MAINE WASH. MN. VT. ND. NH. MICH. MONT. MASS. NY. 3 CT. RI. OR. WS. MICH. 2 NJ. ID. 1 SD. PA. WY. IOWA OH. DL. 5 NB. MD. IL. IN. W. NV. VA . VA . UT. CO. 6 KY. KS. MO. NC. CA. TN. SC. ARK. OK. 0 GA. AZ. AL. NM. 7 MS. TX. 8 4 LA. 9 FL. 10 Coder Storm Intensity Map of composite potential risks for tree damage. This publication is an educational product designed for helping tree professionals appreciate and understand basic aspects of tree mechanical loading during storms. This educational product is a synthesis and integration of weather data and educational concepts regarding how storms wind loads impact trees. This product is for awareness building and educational development. At the time it was finished, this publication contained information regarding storm wind loads on trees thought by the author to provide the best means for considering fundamental tree health care issues surrounding tree biomechanics. The University of Georgia, the Warnell School of Forestry & Natural Resources, and the author are not responsible for any errors, omissions, misinterpretations, or misapplications from this educational product. The author assumed professional users would have some basic tree structure and mechanics background. This product was not designed, nor is suited, for homeowner use. Always seek the advice and assistance of professional tree health providers for tree care and structural assessments. This educational product is only for noncommercial, nonprofit use and may not be copied or reproduced by any means, in any format, or in any media including electronic forms, without explicit written permission of the author. -

What Are We Doing with (Or To) the F-Scale?
5.6 What Are We Doing with (or to) the F-Scale? Daniel McCarthy, Joseph Schaefer and Roger Edwards NOAA/NWS Storm Prediction Center Norman, OK 1. Introduction Dr. T. Theodore Fujita developed the F- Scale, or Fujita Scale, in 1971 to provide a way to compare mesoscale windstorms by estimating the wind speed in hurricanes or tornadoes through an evaluation of the observed damage (Fujita 1971). Fujita grouped wind damage into six categories of increasing devastation (F0 through F5). Then for each damage class, he estimated the wind speed range capable of causing the damage. When deriving the scale, Fujita cunningly bridged the speeds between the Beaufort Scale (Huler 2005) used to estimate wind speeds through hurricane intensity and the Mach scale for near sonic speed winds. Fujita developed the following equation to estimate the wind speed associated with the damage produced by a tornado: Figure 1: Fujita's plot of how the F-Scale V = 14.1(F+2)3/2 connects with the Beaufort Scale and Mach number. From Fujita’s SMRP No. 91, 1971. where V is the speed in miles per hour, and F is the F-category of the damage. This Amazingly, the University of Oklahoma equation led to the graph devised by Fujita Doppler-On-Wheels measured up to 318 in Figure 1. mph flow some tens of meters above the ground in this tornado (Burgess et. al, 2002). Fujita and his staff used this scale to map out and analyze 148 tornadoes in the Super 2. Early Applications Tornado Outbreak of 3-4 April 1974. -
Lecture Notes on Marine Meteorology
Lecture notes on Marine Meteorology By Shri S. P. Joshi Assistant. Meteorologist Office of DDGM (WF) India Meteorological Department Pune-5 Preface The aim of these lecture notes is to provide training to the marine observers in handling and maintenance of meteorological instruments and collect meteorological observations in the form of logbooks. The chapters included in these lecture notes are from the Basic and Intermediate training courses of the department. The present lecture notes are merely a collection of information available on Internet and are compiled from various WMO sites, freely available, keeping in view the up-and-coming trends and new technological advancements. This collection is for private circulation for trainees of Basic and Intermediate training courses of the department and the author do not intend to violate copyrights of anybody what so ever. Port Meteorological Officers in the immediate future have to deal with the modernization of the marine equipments and automation of Marine Data collection, its transmission and archival by observing minimum quality control through the in-built software like TURBOWIN. These lecture notes will also be useful to Port Meteorological Officers in understanding the nature of work of PMOs and will provide them the useful guidelines. A separate chapter on installation of Turbowin is also included in these notes. S. P. Joshi. 9th April 2005. Gudhi Padva Table of contents Chapter no Contents Page no. 1 WMO Voluntary Observing Ships’ Scheme 1 2 Meteorological Instrumentation on board ships 8 3 Port Meteorological Office ( PMO ) 15 4 The Ship Weather Code 19 5 Broadcast of weather bulletins for Merchant shipping 24 6 Broadcast of weather bulletins for Indian navy 28 7 Warnings to Ports and Storm Warning Signals 30 8 Broadcast of weather warnings for fishermen through 34 All India Radio. -
Meteorological Monitoring Guidance for Regulatory Modeling Applications
United States Office of Air Quality EPA-454/R-99-005 Environmental Protection Planning and Standards Agency Research Triangle Park, NC 27711 February 2000 Air EPA Meteorological Monitoring Guidance for Regulatory Modeling Applications Air Q of ua ice li ff ty O Clean Air Pla s nn ard in nd g and Sta EPA-454/R-99-005 Meteorological Monitoring Guidance for Regulatory Modeling Applications U.S. ENVIRONMENTAL PROTECTION AGENCY Office of Air and Radiation Office of Air Quality Planning and Standards Research Triangle Park, NC 27711 February 2000 DISCLAIMER This report has been reviewed by the U.S. Environmental Protection Agency (EPA) and has been approved for publication as an EPA document. Any mention of trade names or commercial products does not constitute endorsement or recommendation for use. ii PREFACE This document updates the June 1987 EPA document, "On-Site Meteorological Program Guidance for Regulatory Modeling Applications", EPA-450/4-87-013. The most significant change is the replacement of Section 9 with more comprehensive guidance on remote sensing and conventional radiosonde technologies for use in upper-air meteorological monitoring; previously this section provided guidance on the use of sodar technology. The other significant change is the addition to Section 8 (Quality Assurance) of material covering data validation for upper-air meteorological measurements. These changes incorporate guidance developed during the workshop on upper-air meteorological monitoring in July 1998. Editorial changes include the deletion of the “on-site” qualifier from the title and its selective replacement in the text with “site specific”; this provides consistency with recent changes in Appendix W to 40 CFR Part 51. -

Fish & Wildlife Branch Research Permit Environmental Condition
Fish & Wildlife Branch Research Permit Environmental Condition Standards Fish and Wildlife Branch Technical Report No. 2013-21 December 2013 Fish & Wildlife Branch Scientific Research Permit Environmental Condition Standards First Edition 2013 PUBLISHED BY: Fish and Wildlife Branch Ministry of Environment 3211 Albert Street Regina, Saskatchewan S4S 5W6 SUGGESTED CITATION FOR THIS MANUAL: Saskatchewan Ministry of Environment. 2013. Fish & Wildlife Branch scientific research permit environmental condition standards. Fish and Wildlife Branch Technical Report No. 2013-21. 3211 Albert Street, Regina, Saskatchewan. 60 pp. ACKNOWLEDGEMENTS: Fish & Wildlife Branch scientific research permit environmental condition standards: The Research Permit Process Renewal working group (Karyn Scalise, Sue McAdam, Ben Sawa, Jeff Keith and Ed Beveridge) compiled the information found in this document to provide necessary information regarding species protocol environmental condition parameters. COVER PHOTO CREDITS: http://www.freepik.com/free-vector/weather-icons-vector- graphic_596650.htm CONTENT PHOTO CREDITS: as referenced CONTACT: [email protected] COPYRIGHT Brand and product names mentioned in this document are trademarks or registered trademarks of their respective holders. Use of brand names does not constitute an endorsement. Except as noted, all illustrations are copyright 2013, Ministry of Environment. ii Contents Introduction ....................................................................................................................... -

The Enhanced Fujita Tornado Scale
NCDC: Educational Topics: Enhanced Fujita Scale Page 1 of 3 DOC NOAA NESDIS NCDC > > > Search Field: Search NCDC Education / EF Tornado Scale / Tornado Climatology / Search NCDC The Enhanced Fujita Tornado Scale Wind speeds in tornadoes range from values below that of weak hurricane speeds to more than 300 miles per hour! Unlike hurricanes, which produce wind speeds of generally lesser values over relatively widespread areas (when compared to tornadoes), the maximum winds in tornadoes are often confined to extremely small areas and can vary tremendously over very short distances, even within the funnel itself. The tales of complete destruction of one house next to one that is totally undamaged are true and well-documented. The Original Fujita Tornado Scale In 1971, Dr. T. Theodore Fujita of the University of Chicago devised a six-category scale to classify U.S. tornadoes into six damage categories, called F0-F5. F0 describes the weakest tornadoes and F5 describes only the most destructive tornadoes. The Fujita tornado scale (or the "F-scale") has subsequently become the definitive scale for estimating wind speeds within tornadoes based upon the damage caused by the tornado. It is used extensively by the National Weather Service in investigating tornadoes, by scientists studying the behavior and climatology of tornadoes, and by engineers correlating damage to different types of structures with different estimated tornado wind speeds. The original Fujita scale bridges the gap between the Beaufort Wind Speed Scale and Mach numbers (ratio of the speed of an object to the speed of sound) by connecting Beaufort Force 12 with Mach 1 in twelve steps. -

Indicative Hazard Profile for Strong Winds in South Africa Page 1 of 11
Research Article Indicative hazard profile for strong winds in South Africa Page 1 of 11 Indicative hazard profile for strong winds in AUTHORS: South Africa Andries C. Kruger1 Dechlan L. Pillay2 Mark van Staden2 While various extreme wind studies have been undertaken for South Africa for the purpose of, amongst others, developing strong wind statistics, disaster models for the built environment and estimations of AFFILIATIONS: tornado risk, a general analysis of the strong wind hazard in South Africa according to the requirements of 1South African Weather Service, the National Disaster Management Centre is needed. The purpose of the research was to develop a national Pretoria, South Africa profile of the wind hazard in the country for eventual input into a national indicative risk and vulnerability 2 Early Warnings and Capability profile. An analysis was undertaken with data from the South African Weather Service’s long-term weather Management Systems, National Disaster Management Centre, stations to quantify the wind hazard on a municipal scale, taking into account that there are more than 220 Centurion, South Africa municipalities in South Africa. South Africa is influenced by various strong wind mechanisms occurring at various spatial and temporal scales. This influence is reflected in the results of the analyses which indicated CORRESPONDENCE TO: that the wind hazard across South Africa is highly variable, spatially and seasonally. A general result was Andries Kruger that the strong wind hazard is highest from the southwestern Cape towards the central and eastern parts of the Northern Cape Province, and the southeastern parts of the coast as well as the eastern interior of the EMAIL: Andries.Kruger@weathersa. -

To Marine Meteorological Services
WORLD METEOROLOGICAL ORGANIZATION Guide to Marine Meteorological Services Third edition PLEASE NOTE THAT THIS PUBLICATION IS GOING TO BE UPDATED BY END OF 2010. WMO-No. 471 Secretariat of the World Meteorological Organization - Geneva - Switzerland 2001 © 2001, World Meteorological Organization ISBN 92-63-13471-5 NOTE The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the World Meteorological Organization concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. TABLE FOR NOTING SUPPLEMENTS RECEIVED Supplement Dated Inserted in the publication No. by date 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 CONTENTS Page FOREWORD................................................................................................................................................. ix INTRODUCTION......................................................................................................................................... xi CHAPTER 1 — MARINE METEOROLOGICAL SERVICES ........................................................... 1-1 1.1 Introduction .................................................................................................................................... 1-1 1.2 Requirements for marine meteorological information....................................................................... 1-1 1.2.1 -
View Document
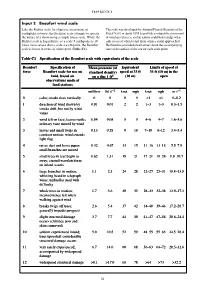
T839 BLOCK 3 Input 2 Beaufort wind scale Like the Richter scale for objective assessment of The scale was developed by Admiral Francis Beaufort of the earthquake severity, the Beaufort scale attempts to specify Royal Navy in about 1805 to provide an objective assessment the nature of a storm using a simple linear scale. While the of wind speed at sea, so that sailors could better judge what Richter scale is logarithmic, so a scale 5 earthquake is 10 sails to use or when to furl them when a storm approached. times more severe than a scale 4 earthquake, the Beaufort He therefore provided observations about the accompanying scale is linear in terms of wind speed (Table C1). state of the surface of the sea for each scale point. Table C1 Specification of the Beaufort scale with equivalents of the scale Beaufort Specification of Mean pressure (at Equivalent Limits of speed at force Beaufort scale for use on standard density) speed at 33 ft 33 ft (10 m) in the land, based on on a disc 1 ft2 (10 m) open observations made at land stations millibar lbf ft−2 knot mph knot mph m s−1 0 calm; smoke rises vertically 0 0 0 0 <1 <1 0–0.2 1 direction of wind shown by 0.01 0.01 2 2 1–3 1–3 0.3–1.5 smoke drift, but not by wind vanes 2 wind felt on face; leaves rustle; 0.04 0.08 5 5 4–6 4–7 1.6–3.6 ordinary vane moved by wind 3 leaves and small twigs in 0.13 0.28 9 10 7–10 8–12 3.4–5.4 constant motion; wind extends light flag 4 raises dust and loose paper; 0.32 0.67 13 15 11–16 13–18 5.5–7.9 small branches are moved 5 small trees in leaf begin to 0.62 1.31 -

JO 7900.5D Chg.1
U.S. DEPARTMENT OF TRANSPORTATION JO 7900.SD CHANGE CHG 1 FEDERAL AVIATION ADMINISTRATION National Policy Effective Date: 11/29/2017 SUBJ: JO 7900.SD Surface Weather Observing 1. Purpose. This change amends practices and procedures in Surface Weather Observing and also defines the FAA Weather Observation Quality Control Program. 2. Audience. This order applies to all FAA and FAA-contract personnel, Limited Aviation Weather Reporting Stations (LAWRS) personnel, Non-Federal Observation (NF-OBS) Program personnel, as well as United States Coast Guard (USCG) personnel, as a component ofthe Department ofHomeland Security and engaged in taking and reporting aviation surface observations. 3. Where I can find this order. This order is available on the FAA Web site at http://faa.gov/air traffic/publications and on the MyFAA employee website at http://employees.faa.gov/tools resources/orders notices/. 4. Explanation of Changes. This change adds references to the new JO 7210.77, Non Federal Weather Observation Program Operation and Administration order and removes the old NF-OBS program from Appendix B. Backup procedures for manual and digital ATIS locations are prescribed. The FAA is now the certification authority for all FAA sponsored aviation weather observers. Notification procedures for the National Enterprise Management Center (NEMC) are added. Appendix B, Continuity of Service is added. Appendix L, Aviation Weather Observation Quality Control Program is also added. PAGE CHANGE CONTROL CHART RemovePa es Dated Insert Pa es Dated ii thru xi 12/20/16 ii thru xi 11/15/17 2 12/20/16 2 11/15/17 5 12/20/17 5 11/15/17 7 12/20/16 7 11/15/17 12 12/20/16 12 11/15/17 15 12/20/16 15 11/15/17 19 12/20/16 19 11/15/17 34 12/20/16 34 11/15/17 43 thru 45 12/20/16 43 thru 45 11/15/17 138 12/20/16 138 11/15/17 148 12/20/16 148 11/15/17 152 thru 153 12/20/16 152 thru 153 11/15/17 AppendixL 11/15/17 Distribution: Electronic 1 Initiated By: AJT-2 11/29/2017 JO 7900.5D Chg.1 5. -

Air Measurements During Pre-Drilling and Drilling Activity
An Interim Report of an Air Quality Assessment of Fort Cherry: Air measurements during Pre-Drilling and Drilling Activity Prepared by the Environmental Health Project 2001 Waterdam Plaza Drive. Suite 201. McMurray, PA 15317 phone 724-260-5504 Household Assessment Report 1 CONTENTS Contents…………………………………………………………………………....…...............…1 Letter of Introduction………………………………………………………………….....……..2 Monitoring Activity at Fort Cherry……………………………………………….....……..3 Summary Table of Volatile Organic Compounds (VOCs) Test Results........4 Speck Air Quality Monitor Data Analysis.………………… ………...………………….5 Discussion of Speck Monitor Results...............……………...... …………………….6 Project Limitations and Further Information..........................…...…………….7 Appendix: Further Speck Analysis ……………………………….………………….….8-13 Fort Cherry School Household Assessment Report 2 To the Fort Cherry School Board, Thank you for using the Speck Air Quality Monitors provided to you by SWPA Environmental Health Project (EHP). We are providing you with an analysis of the data collected by the Speck monitors. With information on the particles in your air, we can determine whether there are patterns of exposures and whether high levels could be produced by indoor activity or if it is more likely generated from outside, possibly from shale gas related activity. What’s in this Report? This report provides a summary of results from your air monitoring. With the development of a third natural gas well pad, Yonkers, located within a mile of Fort Cherry School, concerns about air quality and potential health effects of students were raised by several parents of Fort Cherry students. In response to those concerns, Fort Cherry and EHP are conducting an air quality assessment at the school regarding particulate matter (PM2.5) and volatile organic compounds (VOCs) levels found in the air. -

Storm Definitions & Interpretations in Europe
Managing Your Global Ambitions STORM DEFINITIONS & INTERPRETATIONS IN EUROPE COUNTRY STORM CRITERIA Austria: In Austria the insurance companies pay in case of property losses, when the > 60km/h wind speed is more than 60 km/h. ( 16.7 m/s) Beaufort 7 If the wind speed is less than about 120 km/h (it’s mostly the case) we have to prove if there are failures in constructions, because the Austria wind norms (and I think also EU norms) say that buildings have to be planned so that they withstand storms with more than about 120 km/h. Belgium: Storm is insured under the fire insurance contract. > 22.2 m/s / Beaufort 9 Wind velocity should be in excess of 80km/hr ; 22.2 m/ at a local registration pointer can be related to structural damage nearby Denmark: In Denmark there are no rules for that, it is up to every insurance company to decide a definition. In Denmark we normally (always) use the Beaufort-scale Beaufort 8 and define storm as 8 on that scale. According to this scale, storms begin at 17,2 m/s or 62 km/h. Germany: German Market: According to the Beaufort-Scale storm is clearly defined for wind storms between 9 to 11 Beaufort. This is equivalent to a wind speed from 75 to 117 km/h. However, all insurance contracts in Germany (I don’t know any exception) define a storm starting already from 8 Beaufort (= 62 to 74 km/h. Beaufort 8 Hungary: Please note that in the Hungarian market there is no standard policy wording; each and every insurance company has its own policy.