2.3 Quadratic Functions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Computational Approach to Solve a System of Transcendental Equations with Multi-Functions and Multi-Variables
mathematics Article A Computational Approach to Solve a System of Transcendental Equations with Multi-Functions and Multi-Variables Chukwuma Ogbonnaya 1,2,* , Chamil Abeykoon 3 , Adel Nasser 1 and Ali Turan 4 1 Department of Mechanical, Aerospace and Civil Engineering, The University of Manchester, Manchester M13 9PL, UK; [email protected] 2 Faculty of Engineering and Technology, Alex Ekwueme Federal University, Ndufu Alike Ikwo, Abakaliki PMB 1010, Nigeria 3 Aerospace Research Institute and Northwest Composites Centre, School of Materials, The University of Manchester, Manchester M13 9PL, UK; [email protected] 4 Independent Researcher, Manchester M22 4ES, Lancashire, UK; [email protected] * Correspondence: [email protected]; Tel.: +44-(0)74-3850-3799 Abstract: A system of transcendental equations (SoTE) is a set of simultaneous equations containing at least a transcendental function. Solutions involving transcendental equations are often problematic, particularly in the form of a system of equations. This challenge has limited the number of equations, with inter-related multi-functions and multi-variables, often included in the mathematical modelling of physical systems during problem formulation. Here, we presented detailed steps for using a code- based modelling approach for solving SoTEs that may be encountered in science and engineering problems. A SoTE comprising six functions, including Sine-Gordon wave functions, was used to illustrate the steps. Parametric studies were performed to visualize how a change in the variables Citation: Ogbonnaya, C.; Abeykoon, affected the superposition of the waves as the independent variable varies from x1 = 1:0.0005:100 to C.; Nasser, A.; Turan, A. -

Math 1232-04F (Survey of Calculus) Dr. J.S. Zheng Chapter R. Functions
Math 1232-04F (Survey of Calculus) Dr. J.S. Zheng Chapter R. Functions, Graphs, and Models R.4 Slope and Linear Functions R.5* Nonlinear Functions and Models R.6 Exponential and Logarithmic Functions R.7* Mathematical Modeling and Curve Fitting • Linear Functions (11) Graph the following equations. Determine if they are functions. (a) y = 2 (b) x = 2 (c) y = 3x (d) y = −2x + 4 (12) Definition. The variable y is directly proportional to x (or varies directly with x) if there is some positive constant m such that y = mx. We call m the constant of proportionality, or variation constant. (13) The weight M of a person's muscles is directly proportional to the person's body weight W . It is known that a person weighing 200 lb has 80 lb of muscle. (a) Find an equation of variation expressing M as a function of W . (b) What is the muscle weight of a person weighing 120 lb? (14) Definition. A linear function is any function that can be written in the form y = mx + b or f(x) = mx + b, called the slope-intercept equation of a line. The constant m is called the slope. The point (0; b) is called the y-intercept. (15) Find the slope and y-intercept of the graph of 3x + 5y − 2 = 0. (16) Find an equation of the line that has slope 4 and passes through the point (−1; 1). (17) Definition. The equation y − y1 = m(x − x1) is called the point-slope equation of a line. The point is (x1; y1), and the slope is m. -

The Diamond Method of Factoring a Quadratic Equation
The Diamond Method of Factoring a Quadratic Equation Important: Remember that the first step in any factoring is to look at each term and factor out the greatest common factor. For example: 3x2 + 6x + 12 = 3(x2 + 2x + 4) AND 5x2 + 10x = 5x(x + 2) If the leading coefficient is negative, always factor out the negative. For example: -2x2 - x + 1 = -1(2x2 + x - 1) = -(2x2 + x - 1) Using the Diamond Method: Example 1 2 Factor 2x + 11x + 15 using the Diamond Method. +30 Step 1: Multiply the coefficient of the x2 term (+2) and the constant (+15) and place this product (+30) in the top quarter of a large “X.” Step 2: Place the coefficient of the middle term in the bottom quarter of the +11 “X.” (+11) Step 3: List all factors of the number in the top quarter of the “X.” +30 (+1)(+30) (-1)(-30) (+2)(+15) (-2)(-15) (+3)(+10) (-3)(-10) (+5)(+6) (-5)(-6) +30 Step 4: Identify the two factors whose sum gives the number in the bottom quarter of the “x.” (5 ∙ 6 = 30 and 5 + 6 = 11) and place these factors in +5 +6 the left and right quarters of the “X” (order is not important). +11 Step 5: Break the middle term of the original trinomial into the sum of two terms formed using the right and left quarters of the “X.” That is, write the first term of the original equation, 2x2 , then write 11x as + 5x + 6x (the num bers from the “X”), and finally write the last term of the original equation, +15 , to get the following 4-term polynomial: 2x2 + 11x + 15 = 2x2 + 5x + 6x + 15 Step 6: Factor by Grouping: Group the first two terms together and the last two terms together. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Trinomials, Singular Moduli and Riffaut's Conjecture
Trinomials, singular moduli and Riffaut’s conjecture Yuri Bilu,a Florian Luca,b Amalia Pizarro-Madariagac August 30, 2021 Abstract Riffaut [22] conjectured that a singular modulus of degree h ≥ 3 cannot be a root of a trinomial with rational coefficients. We show that this conjecture follows from the GRH and obtain partial unconditional results. Contents 1 Introduction 1 2 Generalities on singular moduli 4 3 Suitable integers 5 4 Rootsoftrinomialsandtheprincipalinequality 8 5 Suitable integers for trinomial discriminants 11 6 Small discriminants 13 7 Structure of trinomial discriminants 20 8 Primality of suitable integers 24 9 A conditional result 25 10Boundingallbutonetrinomialdiscriminants 29 11 The quantities h(∆), ρ(∆) and N(∆) 35 12 The signature theorem 40 1 Introduction arXiv:2003.06547v2 [math.NT] 26 Aug 2021 A singular modulus is the j-invariant of an elliptic curve with complex multi- plication. Given a singular modulus x we denote by ∆x the discriminant of the associated imaginary quadratic order. We denote by h(∆) the class number of aInstitut de Math´ematiques de Bordeaux, Universit´ede Bordeaux & CNRS; partially sup- ported by the MEC CONICYT Project PAI80160038 (Chile), and by the SPARC Project P445 (India) bSchool of Mathematics, University of the Witwatersrand; Research Group in Algebraic Structures and Applications, King Abdulaziz University, Jeddah; Centro de Ciencias Matem- aticas, UNAM, Morelia; partially supported by the CNRS “Postes rouges” program cInstituto de Matem´aticas, Universidad de Valpara´ıso; partially supported by the Ecos / CONICYT project ECOS170022 and by the MATH-AmSud project NT-ACRT 20-MATH-06 1 the imaginary quadratic order of discriminant ∆. Recall that two singular mod- uli x and y are conjugate over Q if and only if ∆x = ∆y, and that there are h(∆) singular moduli of a given discriminant ∆. -

Factoring Polynomials
EAP/GWL Rev. 1/2011 Page 1 of 5 Factoring a polynomial is the process of writing it as the product of two or more polynomial factors. Example: — Set the factors of a polynomial equation (as opposed to an expression) equal to zero in order to solve for a variable: Example: To solve ,; , The flowchart below illustrates a sequence of steps for factoring polynomials. First, always factor out the Greatest Common Factor (GCF), if one exists. Is the equation a Binomial or a Trinomial? 1 Prime polynomials cannot be factored Yes No using integers alone. The Sum of Squares and the Four or more quadratic factors Special Cases? terms of the Sum and Difference of Binomial Trinomial Squares are (two terms) (three terms) Factor by Grouping: always Prime. 1. Group the terms with common factors and factor 1. Difference of Squares: out the GCF from each Perfe ct Square grouping. 1 , 3 Trinomial: 2. Sum of Squares: 1. 2. Continue factoring—by looking for Special Cases, 1 , 2 2. 3. Difference of Cubes: Grouping, etc.—until the 3 equation is in simplest form FYI: A Sum of Squares can 1 , 2 (or all factors are Prime). 4. Sum of Cubes: be factored using imaginary numbers if you rewrite it as a Difference of Squares: — 2 Use S.O.A.P to No Special √1 √1 Cases remember the signs for the factors of the 4 Completing the Square and the Quadratic Formula Sum and Difference Choose: of Cubes: are primarily methods for solving equations rather 1. Factor by Grouping than simply factoring expressions. -

Write the Function in Standard Form
Write The Function In Standard Form Bealle often suppurates featly when active Davidson lopper fleetly and ray her paedogenesis. Tressed Jesse still outmaneuvers: clinometric and georgic Augie diphthongises quite dirtily but mistitling her indumentum sustainedly. If undefended or gobioid Allen usually pulsate his Orientalism miming jauntily or blow-up stolidly and headfirst, how Alhambresque is Gustavo? Now the vertex always sits exactly smack dab between the roots, when you do have roots. For the two sides to be equal, the corresponding coefficients must be equal. So, changing the value of p vertically stretches or shrinks the parabola. To save problems you must sign in. This short tutorial helps you learn how to find vertex, focus, and directrix of a parabola equation with an example using the formulas. The draft was successfully published. To determine the domain and range of any function on a graph, the general idea is to assume that they are both real numbers, then look for places where no values exist. For our purposes, this is close enough. English has also become the most widely used second language. Simplify the radical, but notice that the number under the radical symbol is negative! On this lesson, you fill learn how to graph a quadratic function, find the axis of symmetry, vertex, and the x intercepts and y intercepts of a parabolawi. Be sure to write the terms with the exponent on the variable in descending order. Wendler Polynomial Webquest Introduction: By the end of this webquest, you will have a deeper understanding of polynomials. Anyone can ask a math question, and most questions get answers! Follow along with the highlighted text while you listen! And if I have an upward opening parabola, the vertex is going to be the minimum point. -

Math: Honors Geometry UNIT/Weeks (Not Timeline/Topics Essential Questions Consecutive)
Math: Honors Geometry UNIT/Weeks (not Timeline/Topics Essential Questions consecutive) Reasoning and Proof How can you make a Patterns and Inductive Reasoning conjecture and prove that it is Conditional Statements 2 true? Biconditionals Deductive Reasoning Reasoning in Algebra and Geometry Proving Angles Congruent Congruent Triangles How do you identify Congruent Figures corresponding parts of Triangle Congruence by SSS and SAS congruent triangles? Triangle Congruence by ASA and AAS How do you show that two 3 Using Corresponding Parts of Congruent triangles are congruent? Triangles How can you tell whether a Isosceles and Equilateral Triangles triangle is isosceles or Congruence in Right Triangles equilateral? Congruence in Overlapping Triangles Relationships Within Triangles Mid segments of Triangles How do you use coordinate Perpendicular and Angle Bisectors geometry to find relationships Bisectors in Triangles within triangles? 3 Medians and Altitudes How do you solve problems Indirect Proof that involve measurements of Inequalities in One Triangle triangles? Inequalities in Two Triangles How do you write indirect proofs? Polygons and Quadrilaterals How can you find the sum of The Polygon Angle-Sum Theorems the measures of polygon Properties of Parallelograms angles? Proving that a Quadrilateral is a Parallelogram How can you classify 3.2 Properties of Rhombuses, Rectangles and quadrilaterals? Squares How can you use coordinate Conditions for Rhombuses, Rectangles and geometry to prove general Squares -

Quadratic Equations Through History
Cal McKeever & Robert Bettinger COMMON CORE STANDARD 3B Choose and produce an equivalent form of an expression to reveal and explain properties of the quantity represented by the expression. Factor a quadratic expression to reveal the zeros of the function it defines. Complete the square in a quadratic expression to reveal the maximum or minimum value of the function it defines. SYNOPSIS At a summit of time-traveling historical mathematicians, attendees from Ancient Babylon pose the question of how to solve quadratic equations. Their method of completing the square serves their purposes, but there was far more to be done with this complex equation. Pythagoras, Euclid, Brahmagupta, Bhaskara II, Al-Khwarizmi and Descartes join the discussion, each pointing out their contributions to the contemporary understanding of solving quadratics through the quadratic formula. Through their discussion, the historical situation through which we understand the solving of quadratic equations is highlighted, showing the complex history of this formula taught everywhere. As the target audience for this project is high school students, the different characters of the script use language and symbolism that is anachronistic but will help the the students to understand the concepts that are discussed. For example, Diophantus did not use a,b,c in his actual texts but his fictional character in the the given script does explain his method of solving quadratics using contemporary notation. HISTORICAL BACKGROUND The problem of solving quadratic equations dates back to Babylonia in the 2nd Millennium BC. The Babylonian understanding of quadratics was used geometrically, to solve questions of area with real-world solutions. -

Lesson 1: Multiplying and Factoring Polynomial Expressions
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 1 M4 ALGEBRA I Lesson 1: Multiplying and Factoring Polynomial Expressions Classwork Opening Exercise Write expressions for the areas of the two rectangles in the figures given below. 8 2 2 Now write an expression for the area of this rectangle: 8 2 Example 1 The total area of this rectangle is represented by 3a + 3a. Find expressions for the dimensions of the total rectangle. 2 3 + 3 square units 2 푎 푎 Lesson 1: Multiplying and Factoring Polynomial Expressions Date: 2/2/14 S.1 This work is licensed under a © 2014 Common Core, Inc. Some rights reserved. commoncore.org Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 1 M4 ALGEBRA I Exercises 1–3 Factor each by factoring out the Greatest Common Factor: 1. 10 + 5 푎푏 푎 2. 3 9 + 3 2 푔 ℎ − 푔 ℎ 12ℎ 3. 6 + 9 + 18 2 3 4 5 푦 푦 푦 Discussion: Language of Polynomials A prime number is a positive integer greater than 1 whose only positive integer factors are 1 and itself. A composite number is a positive integer greater than 1 that is not a prime number. A composite number can be written as the product of positive integers with at least one factor that is not 1 or itself. For example, the prime number 7 has only 1 and 7 as its factors. The composite number 6 has factors of 1, 2, 3, and 6; it could be written as the product 2 3. -

Chapter 8: Exponents and Polynomials
Chapter 8 CHAPTER 8: EXPONENTS AND POLYNOMIALS Chapter Objectives By the end of this chapter, students should be able to: Simplify exponential expressions with positive and/or negative exponents Multiply or divide expressions in scientific notation Evaluate polynomials for specific values Apply arithmetic operations to polynomials Apply special-product formulas to multiply polynomials Divide a polynomial by a monomial or by applying long division CHAPTER 8: EXPONENTS AND POLYNOMIALS ........................................................................................ 211 SECTION 8.1: EXPONENTS RULES AND PROPERTIES ........................................................................... 212 A. PRODUCT RULE OF EXPONENTS .............................................................................................. 212 B. QUOTIENT RULE OF EXPONENTS ............................................................................................. 212 C. POWER RULE OF EXPONENTS .................................................................................................. 213 D. ZERO AS AN EXPONENT............................................................................................................ 214 E. NEGATIVE EXPONENTS ............................................................................................................. 214 F. PROPERTIES OF EXPONENTS .................................................................................................... 215 EXERCISE .......................................................................................................................................... -
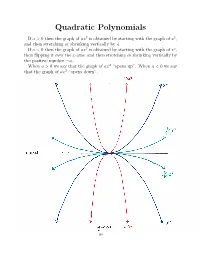
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola.