The Cfav Quest's Lewex Experience
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Royal Danish Naval Museu
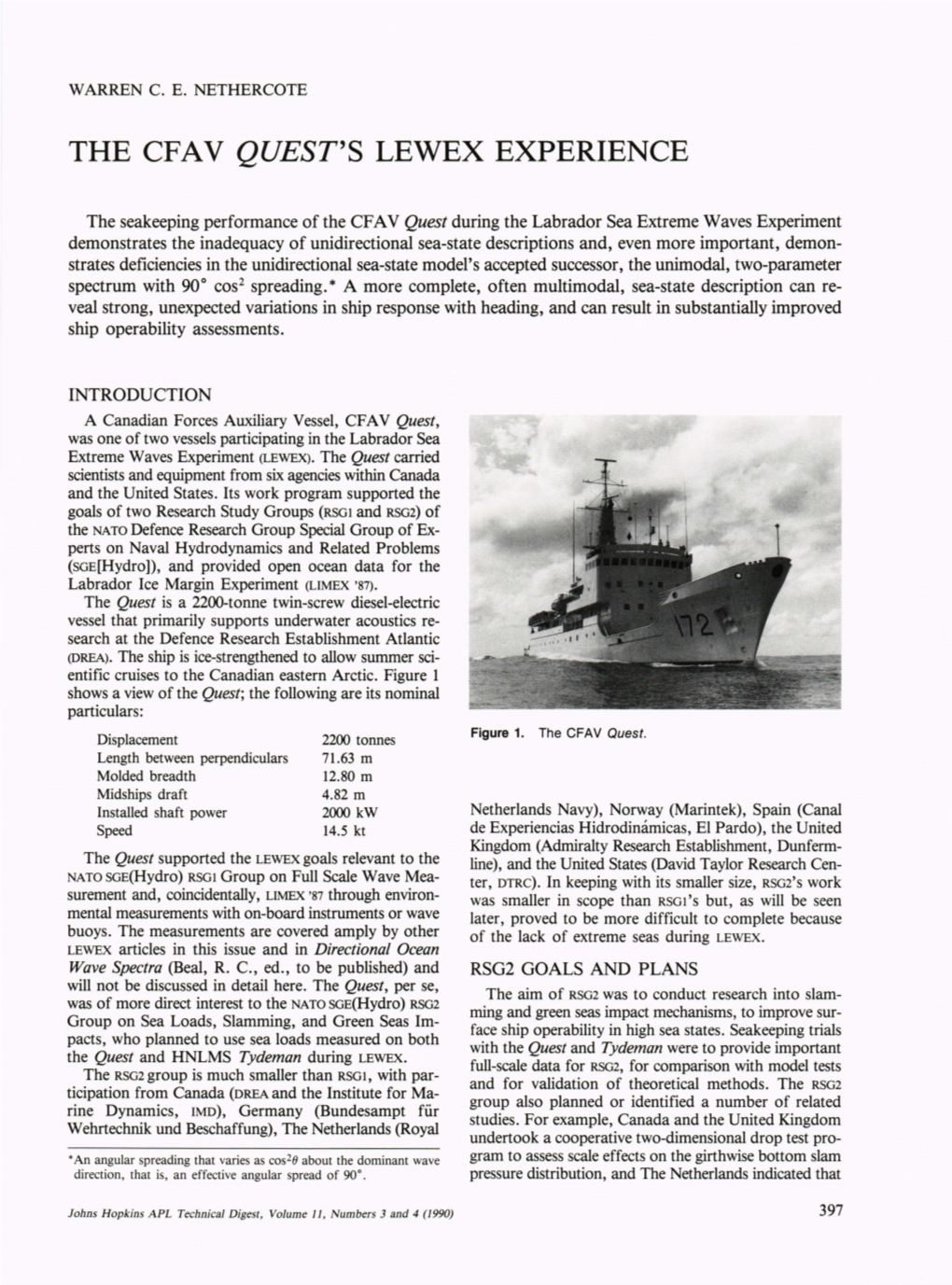
THE ROYAL DANISH NAVAL MUSEU An introduction to the History of th , Royal Danish Na~ Ole lisberg Jensen Royal Danish Naval Museum Copenhagen 1994 THE ROYAL DANISH NAVAL MUSEUM An introduction to the History of the Royal Danish Navy. Ole Lisberg Jensen Copyright: Ole Lisberg Jensen, 1994 Printed in Denmark by The Royal Danish Naval Museum and Amager Centraltrykkeri ApS Published by the Royal Danish Naval Museum ISBN 87-89322-18-5 Frontispiece: c. Neumann 1859 Danish naval vessel at anchor off the British coast. One of the first naval artists, Neumann sailed with the fleet on a summer expedition. Title: The famous Dutch battle artist, Willem van der Velde (the elder), sailed with the Dutch relief fleet to Copenhagen in October 1658. Here we see one of his sketches, showing 5 Danish naval vessels led by TREFOLDIGHED. Copenhagen is in the background. Photo: archives of the Royal Danish Naval Museum. Back cover: The building housing the Royal Danish Naval Museum at Christianshavns Ksnel was originally a hospital wing of the Sekveesthuset. In 1988-89, the building was converted for the use of the Royal Danish Naval Museum with the aid ofa magnificent donation from »TheA.P. Moller and Mrs. Chastine Meersk. Mckinney Moller's Foundation for General Purposes". The building was constructed in 1780 by master builder Schotmann. When it was handed over to the Royal Danish Naval Museum, the building passed from the responsibility of the Ministry of Defence to that of the Ministry of Culture. PREFACE This catalogue is meant as a contribution to an understan War the models were evacuated to Frederiksborg Slot, and it ding ofthe chronology ofthe exhibits in the Royal Danish Na was not until 1957that the Royal Danish Naval Museum was val Museum. -

Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress
Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress September 16, 2021 Congressional Research Service https://crsreports.congress.gov RL32665 Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress Summary The current and planned size and composition of the Navy, the annual rate of Navy ship procurement, the prospective affordability of the Navy’s shipbuilding plans, and the capacity of the U.S. shipbuilding industry to execute the Navy’s shipbuilding plans have been oversight matters for the congressional defense committees for many years. In December 2016, the Navy released a force-structure goal that calls for achieving and maintaining a fleet of 355 ships of certain types and numbers. The 355-ship goal was made U.S. policy by Section 1025 of the FY2018 National Defense Authorization Act (H.R. 2810/P.L. 115- 91 of December 12, 2017). The Navy and the Department of Defense (DOD) have been working since 2019 to develop a successor for the 355-ship force-level goal. The new goal is expected to introduce a new, more distributed fleet architecture featuring a smaller proportion of larger ships, a larger proportion of smaller ships, and a new third tier of large unmanned vehicles (UVs). On June 17, 2021, the Navy released a long-range Navy shipbuilding document that presents the Biden Administration’s emerging successor to the 355-ship force-level goal. The document calls for a Navy with a more distributed fleet architecture, including 321 to 372 manned ships and 77 to 140 large UVs. A September 2021 Congressional Budget Office (CBO) report estimates that the fleet envisioned in the document would cost an average of between $25.3 billion and $32.7 billion per year in constant FY2021 dollars to procure. -

Sea-Based Sources of Marine Litter – a Review of Current Knowledge and Assessment of Data Gaps (Second Interim Report of Gesamp Working Group 43, 4 June 2020)
August 2020 COFI/2020/SBD.8 8 E COMMITTEE ON FISHERIES Thirty-Fourth Session Rome, 1-5 February 2021 (TBC) SEA-BASED SOURCES OF MARINE LITTER – A REVIEW OF CURRENT KNOWLEDGE AND ASSESSMENT OF DATA GAPS (SECOND INTERIM REPORT OF GESAMP WORKING GROUP 43, 4 JUNE 2020) SEA-BASED SOURCES OF MARINE LITTER – A REVIEW OF CURRENT KNOWLEDGE AND ASSESSMENT OF DATA GAPS Second Interim Report of GESAMP Working Group 43 4 June 2020 GESAMP WG 43 Second Interim Report, June 4, 2020 COFI/2021/SBD.8 Notes: GESAMP is an advisory body consisting of specialized experts nominated by the Sponsoring Agencies (IMO, FAO, UNESCO-IOC, UNIDO, WMO, IAEA, UN, UNEP, UNDP and ISA). Its principal task is to provide scientific advice concerning the prevention, reduction and control of the degradation of the marine environment to the Sponsoring Organizations. The report contains views expressed or endorsed by members of GESAMP who act in their individual capacities; their views may not necessarily correspond with those of the Sponsoring Organizations. Permission may be granted by any of the Sponsoring Organizations for the report to be wholly or partially reproduced in publication by any individual who is not a staff member of a Sponsoring Organizations of GESAMP, provided that the source of the extract and the condition mentioned above are indicated. Information about GESAMP and its reports and studies can be found at: http://gesamp.org Copyright © IMO, FAO, UNESCO-IOC, UNIDO, WMO, IAEA, UN, UNEP, UNDP, ISA 2020 ii Authors: Kirsten V.K. Gilardi (WG 43 Chair), Kyle Antonelis, Francois Galgani, Emily Grilly, Pingguo He, Olof Linden, Rafaella Piermarini, Kelsey Richardson, David Santillo, Saly N. -
Reference Sheet
TACTICALL NAVY REFERENCES Internal Communication External Communication TactiCall gives you complete control and fast access to all net- TactiCall is a perfect match for Task- or coalition force operations, works on board your vessel. Be it Functional Nets including teleph- including other military arms. SOF teams, air force, marine detach- ony, public address, entertainment systems and the like or Fighting ments and even civil and NGO agencies can be important players Nets handling alarms, broadcasts and orders, weapon teams or in the operation. More often than not, this setup includes a multi- mission control. tude of different frequency bands, networks and radio equipment. TactiCall will integrate all these into one simple and easy to use TactiCall is highly flexible and scalable, it is platform independent solution that permits everybody to reach each other regardless of and will integrate seamlessly into your combat management sys- equipment and technology used. tem of choice. In other words TactiCall lets you control all internal communication on board your vessel and with features such as TactiCall will allow key features for modern day operations like red/ record and playback helps you log and later analyze your commu- black separation, multi-level security operations, global public ad- nication flows. dress and allowing government or task force commanders to com- municate directly with whoever needs to be addressed in a given situation - facilitating a much smoother and more rapid “Statement of No Objections” chain. Contact Porten -

Ship of Shame Gender and Nation in Narratives of the 1981 Soviet Submarine Crisis in Sweden
Ship of Shame Gender and Nation in Narratives of the 1981 Soviet Submarine Crisis in Sweden ✣ Cecilia Ase˚ On the evening of 27 October 1981, a Soviet submarine, U-137, ran aground and was stranded on a rock in a restricted military area near a naval base in Karlskrona, in the southeastern part of Sweden. The boat was discovered the next morning by a local fisherman, who alerted the authorities. Until 6 November, when the submarine was restored to a Soviet fleet waiting beyond the limits of Sweden’s territorial waters, it remained an object of marked military attention and intense diplomatic negotiations. Media coverage of the incident was extensive and made headline news in Sweden and around the world. From Sweden’s perspective, the submarine was a security threat and a flagrant breach of the country’s territorial sovereignty. After the delayed dis- covery of the boat, the Swedish military acted resolutely. Heavily armed troops filled the islands surrounding the submarine, numerous military vessels took positions nearby, and marine helicopters and air force planes circled the area. However, as the diplomatic negotiations became protracted, the sense of shock and disbelief diminished, and concern over national prestige and reputation became all the more rampant. A sense of danger returned with renewed force on the afternoon of 5 November, when Prime Minister Thorbjorn¨ Falldin¨ announced with restrained emotion at a press conference that the submarine carried nuclear weapons.1 This declaration was sensational news and made the violation of Swedish territory appear all the more serious. In the decade following the U-137 episode, the Swedish military was involved in numerous other submarine searches, evicting what were ostensibly foreign submarines from Swedish waters and dropping sink bombs. -

M2089 Selected German Documents from the Records of the Naval
M2089 SELECTED GERMAN DOCUMENTS FROM THE RECORDS OF THE NAVAL RECORDS COLLECTION OF THE OFFICE OF NAVAL RECORDS AND LIBRARY, 1897–1917 Timothy P. Mulligan prepared the Introduction and arranged these records for microfilming. National Archives and Records Administration Washington, DC 2006 INTRODUCTION On the four rolls of this microfilm publication, M2089, are reproduced the contents of 34 logbooks and other bound volumes of original German Navy and merchant marine records located among the Naval Records Collection of the Office of Naval Records and Library, 1897–1917, Record Group (RG) 45. The materials reproduced here constitute a part of those original German documents approved for restitution to the Bundesarchiv following the latter’s request and subsequent negotiations with the National Archives and Records Administration (NARA). For these German documents, microfilm publication M2089 represents the record copy retained by NARA. BACKGROUND President John Adams authorized the establishment of the Navy Department Library on March 31, 1800. Originally a component of the Office of the Secretary of the Navy, the Navy Department Library was transferred by Navy Department General Order 292 on March 23, 1882, to the newly established Office of Naval Intelligence. There an unofficial adjunct staff to the Library, designated the Naval War Records Office, came into being in 1882 to compile for publication selected documents on naval aspects of the Civil War. On July 7, 1884, the Naval War Records Office and the Navy Department Library were formally consolidated by the Naval Appropriation Act (23. Stat. 185) into the Office of Library and Naval War Records. In October 1889 the Office was returned to the Office of the Secretary of the Navy, and assumed custody of the pre-1886 office files of the Secretary of the Navy. -
An Updated Synthesis of the Impacts of Ocean Acidification on Marine Biodiversity CBD Technical Series No
Secretariat of the CBD Technical Series Convention on No. 75 Biological Diversity 75 An Updated Synthesis of the Impacts of Ocean Acidification on Marine Biodiversity CBD Technical Series No. 75 AN UPDATED SYNTHESIS OF THE IMPACTS OF OCEAN ACIDIFICATION ON MARINE BIODIVERSITY The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the copyright holders concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. This publication may be reproduced for educational or non-profit purposes without special permission, provided acknowledgement of the source is made. The Secretariat of the Convention would appreciate receiving a copy of any publications that use this document as a source. Reuse of the figures is subject to permission from the original rights holders. Published by the Secretariat of the Convention on Biological Diversity. ISBN 92-9225-527-4 (print version); ISBN 92-9225-528-2 (web version) Copyright © 2014, Secretariat of the Convention on Biological Diversity Citation: Secretariat of the Convention on Biological Diversity (2014). An Updated Synthesis of the Impacts of Ocean Acidification on Marine Biodiversity (Eds: S. Hennige, J.M. Roberts & P. Williamson). Montreal, Technical Series No. 75, 99 pages For further information, contact: Secretariat of the Convention on Biological Diversity World Trade Centre, 413 Rue St. Jacques, Suite 800, Montréal, Quebec,Canada H2Y 1N9 Tel: +1 (514) 288 2220 Fax: +1 (514) 288 6588 E-mail: [email protected] Website: www.cbd.int Cover images, top to bottom: Katharina Fabricius; N. -
Royal Netherlands Navy's Future Fleet Capabilities
NETHERLANDS DEFENCE ACADEMY BREDA, THE NETHERLANDS THESIS Royal Netherlands Navy’s Future Fleet Capabilities: A Continuation of Rational Thinking by Welmer Veenstra August 2016 Thesis Advisor: Prof. Dr. J.M.M.L. Soeters Co-Examiner: Prof. Dr. P.C. van Fenema Approved for public release, distribution unlimited (INTENTIONALLY BLANK) Approved for public release, distribution unlimited Royal Netherlands Navy’s Future Fleet Capabilities: A Continuation of Rational Thinking W. Veenstra Lieutenant commander, Royal Netherlands Navy Royal Netherlands Naval Academy, 2001 Submitted in partial fulfilment of the requirements for the degree of MASTER OF ARTS IN MILITARY STRATEGIC STUDIES from the NETHERLANDS DEFENCE ACADEMY August 2016 Approved by: Prof. Dr. J.M.M.L. Soeters Thesis Advisor Prof. Dr. P.C. van Fenema Co-Examiner The views expressed in this thesis or those of the author and do not reflect the official policy or position of the Dutch Ministry of Defence or the Dutch Government. i (INTENTIONALLY BLANK) ii ABSTRACT This thesis presents fleet considerations and alternatives for the future composition of the Royal Netherlands Navy (RNLN). This is important because 80% of the Dutch fleet will reach their end of service life in the next two decades. A framework for conceptual analysis was developed based on the Strategy Triangle consisting of goals, strategies, and capabilities. Bounded rationality was applied to analyse the NATO, EU, and Dutch maritime security strategies, and the thirteen semi-structured interviews with stakeholders and experts. The revaluation of the Rational Actor Model is supported. The value of the Span of Maritime Operations model for navies to explain their strategic utility is reconfirmed. -

MARINE DEBRIS:83 UNDERSTANDING, PREVENTING and MITIGATING the SIGNIFICANT ADVERSE IMPACTS on MARINE and COASTAL BIODIVERSITY CBD Technical Series No
Secretariat of the CBD Technical Series No. 83 Convention on Biological Diversity MARINE DEBRIS:83 UNDERSTANDING, PREVENTING AND MITIGATING THE SIGNIFICANT ADVERSE IMPACTS ON MARINE AND COASTAL BIODIVERSITY CBD Technical Series No. 83 Marine Debris: Understanding, Preventing and Mitigating the Significant Adverse Impacts on Marine and Coastal Biodiversity Marine Debris: Understanding, Preventing and Mitigating the Significant Adverse Impacts on Marine and Coastal Biodiversity Published by the Secretariat of the Convention on Biological Diversity ISBN: 9789292256258 Copyright © 2016, Secretariat of the Convention on Biological Diversity The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the Convention on Biological Diversity concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. The views reported in this publication do not necessarily represent those of the Convention on Biological Diversity. This publication may be reproduced for educational or non-profit purposes without special permission from the copyright holders, provided acknowledgement of the source is made. The Secretariat of the Convention would appreciate receiving a copy of any publications that use this document as a source. Citation Marine Debris: Understanding, Preventing and Mitigating the Significant Adverse Impacts on Marine and Coastal Biodiversity. Technical -
The Royal Netherlands Navy in Focus
The Royal Netherlands Navy in Focus For security at and from the sea Acknowledgements This brochure is a publication by the Ministry of Defence of the Netherlands Royal Netherlands Navy, Communications Division. Interested in a job in the Navy? Recruitment and selection services centre. P.O. BOX 2630, 1000 CP Amsterdam, The Netherlands www.werkenbijdefensie.nl www.facebook.com/werkenbijdefensie For more information, please contact: Royal Netherlands Navy Communications Division P.O. Box 10000 1780 CA Den Helder, The Netherlands [email protected] November 2015 Photographs: Defence Media Centre No rights can be derived from this publication. All information printed is subject to change. The Royal Netherlands Navy in Focus The Royal Netherlands Navy in Focus 1 2 Security at and from the sea The Royal Netherlands Navy (RNLN) represents peace and security at sea and from the sea. Every single day, all over the world, our fleet and marine units contribute to achieve this objective. Besides protecting national and allied territory, the Royal Netherlands Navy does much more in the interest of the Netherlands. Together with our international partners, we combat sources of instability across the globe, in countries such as Mali, Iraq and Afghanistan. In the waters around Somalia, the RNLN keeps the sea routes clear by fighting piracy. On top of that, the Marine Corps provides heavily armed military security teams to protect vulnerable merchant vessels. In the Caribbean, the fleet and marines tackle drug trafficking. Throughout the Netherlands, we are on 24 hour standby with the Marine Corps’ antiterrorism units, guard ships, port protection units, the Defence Diving Group and Marine Spearhead Task Unit, as well as various other units, to ensure the security of our country. -

ROYAL DANISH NAVY Ships Ol the Fleet
ROYAL DANISH NAVY Ships ol the Fleet June 19 77 Th e stren gth Bnd composi t i on of the Royal Dan i sh Nav y are gover ne d by t he Defe n c e Ac t oC Apr il, 1973 , ba s e d u p on a n a&ree m_ e n t ma de by 4 ma j or poli t ica l parti e s, and prolon ged f o r a n oth e r 4 years aa of Harc h, 19 77 . The De fence Ac t i s to some e x t e nt based on a statement made by t he ChieC of Navy end ing up i n wha t i s calle d wPI. n f or the Fl ee t 19 8 2 w • Th is plan i s lar gel y t h e r e sult of considerati on s rega rdi n g t h e outmo st u a e of the g e oph y s i cal s itua t i on i n the Bal t i c Approa c h e a a nd the deai r e to c ontinue t h e establ i a hed balanc e d :flee t comp osition . Th e fl e e t comp ositi on is as follows: Sta t u s Q.2.!.! Wa r Un i ts: Frigate s /Corvettes 5 5 Fast Patrol Boats 1 6 1 8 Submarin es 6 6 Minela y e r s 4 4 Coastal Minelayers 1 J Mine swe e p e r s 8 8 Seaw a rd Defence Craft 9 8 Combat Helicopters 0 8 Special Purpose Ships J Fi shery Prote c t ion Ships wi t h ocean eacort capability 5 5 I nspe c tion Cu t t or s ( Inshor e Cu t ters ) 5 5 Na val Cutte rs (Harbour Cutters) 9 9 Hel i cop ters 6 6 Oilers 2 2 Only during time of peace 2 mi n e l a ye r s a r e e mploy ed aa t ra i nin g s h ip Rnd depo t s hip , respec tive ly. -

Navy-Marine Corps Amphibious and Maritime Prepositioning Ship Programs: Background and Oversight Issues for Congress
Order Code RL32513 Navy-Marine Corps Amphibious and Maritime Prepositioning Ship Programs: Background and Oversight Issues for Congress Updated July 10, 2007 Ronald O’Rourke Specialist in National Defense Foreign Affairs, Defense, and Trade Division Navy-Marine Corps Amphibious and Maritime Prepositioning Ship Programs: Background and Oversight Issues for Congress Summary The Navy is proposing to maintain in coming years a Navy with 31 amphibious ships and an additional squadron of 14 Maritime Prepositioning Force (Future), or MPF(F), ships. The MPF(F) squadron is intended to implement a new operational concept called sea basing, under which forces would be staged at sea and used to conduct expeditionary operations ashore with little or no reliance on nearby land bases. The Navy’s proposed FY2008 budget requests $1,398.3 million in procurement funding for a ninth San Antonio (LPD-17) amphibious ship to be procured in FY2008. The Navy estimates the total procurement cost of this ship at $1,798.3 million. The ship received $296.2 million in FY2008 advance procurement funding, and the Navy’s proposed FY2008 budget calls for the final $103.2 million of the ship’s procurement cost to be provided in FY2009 as a “program closeout” cost. Although the Navy’s proposed force of 31 amphibious ships includes ten LPD-17 class ships, the Navy is proposing in its FY2008 budget to end LPD-17 procurement with the ninth ship. The Navy’s proposed FY2008 budget also requests $1,377.4 million in procurement funding to complete the procurement cost of LHA-6, a large-deck amphibious assault ship that was procured in FY2007 using split funding (a two-year form of incremental funding) in FY2007 and FY2008.