Tracking of High-Speed, Non-Smooth and Microscale-Amplitude Wave Trajectories
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Verified Design Analog Pulse Width Modulation
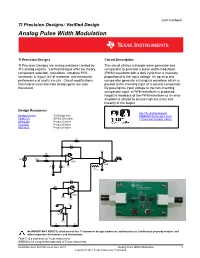
John Caldwell TI Precision Designs: Verified Design Analog Pulse Width Modulation TI Precision Designs Circuit Description TI Precision Designs are analog solutions created by This circuit utilizes a triangle wave generator and TI’s analog experts. Verified Designs offer the theory, comparator to generate a pulse-width-modulated component selection, simulation, complete PCB (PWM) waveform with a duty cycle that is inversely schematic & layout, bill of materials, and measured proportional to the input voltage. An op amp and performance of useful circuits. Circuit modifications comparator generate a triangular waveform which is that help to meet alternate design goals are also passed to the inverting input of a second comparator. discussed. By passing the input voltage to the non-inverting comparator input, a PWM waveform is produced. Negative feedback of the PWM waveform to an error amplifier is utilized to ensure high accuracy and linearity of the output Design Resources Ask The Analog Experts Design Archive All Design files WEBENCH® Design Center TINA-TI™ SPICE Simulator TI Precision Designs Library OPA2365 Product Folder TLV3502 Product Folder REF3325 Product Folder R4 C1 VCC R3 - VPWM + VIN VREF R1 + ++ + U1A - U2A V R2 C2 CC VTRI C3 R7 - ++ U1B VREF VCC VREF - ++ U2B VCC R6 R5 An IMPORTANT NOTICE at the end of this TI reference design addresses authorized use, intellectual property matters and other important disclaimers and information. TINA-TI is a trademark of Texas Instruments WEBENCH is a registered trademark of Texas Instruments SLAU508-June 2013-Revised June 2013 Analog Pulse Width Modulation 1 Copyright © 2013, Texas Instruments Incorporated www.ti.com 1 Design Summary The design requirements are as follows: Supply voltage: 5 Vdc Input voltage: -2 V to +2 V, dc coupled Output: 5 V, 500 kHz PWM Ideal transfer function: V The design goals and performance are summarized in Table 1. -

The Oscilloscope and the Function Generator: Some Introductory Exercises for Students in the Advanced Labs
The Oscilloscope and the Function Generator: Some introductory exercises for students in the advanced labs Introduction So many of the experiments in the advanced labs make use of oscilloscopes and function generators that it is useful to learn their general operation. Function generators are signal sources which provide a specifiable voltage applied over a specifiable time, such as a \sine wave" or \triangle wave" signal. These signals are used to control other apparatus to, for example, vary a magnetic field (superconductivity and NMR experiments) send a radioactive source back and forth (M¨ossbauer effect experiment), or act as a timing signal, i.e., \clock" (phase-sensitive detection experiment). Oscilloscopes are a type of signal analyzer|they show the experimenter a picture of the signal, usually in the form of a voltage versus time graph. The user can then study this picture to learn the amplitude, frequency, and overall shape of the signal which may depend on the physics being explored in the experiment. Both function generators and oscilloscopes are highly sophisticated and technologically mature devices. The oldest forms of them date back to the beginnings of electronic engineering, and their modern descendants are often digitally based, multifunction devices costing thousands of dollars. This collection of exercises is intended to get you started on some of the basics of operating 'scopes and generators, but it takes a good deal of experience to learn how to operate them well and take full advantage of their capabilities. Function generator basics Function generators, whether the old analog type or the newer digital type, have a few common features: A way to select a waveform type: sine, square, and triangle are most common, but some will • give ramps, pulses, \noise", or allow you to program a particular arbitrary shape. -

The Differential Pair As a Triangle-Sine Wave Converter V - ROBERT G
418 IEEE JOURNAL OF SOLID-STATE CIRCUITS, JUNE 1976 Correspondence The Differential Pair as a Triangle-Sine Wave Converter v - ROBERT G. MEYER, WILLY M. C. SANSEN, SIK LUI, AND STEFAN PEETERS R~ R~ 1 / Abstract–The performance of a differential pair with emitter degen- eration as a triangle-sine wave converter is analyzed. Equations describ- ing the circuit operation are derived and solved both analytically and by computer. This allows selection of operating conditions for optimum performance such that total harmonic distortion as low as 0.2 percent “- has been measured. -vEE (a) I. INTRODUCTION The conversion of ttiangle waves to sine waves is a function I ---- I- often required in waveshaping circuits. For example, the oscil- lators used in function generators usually generate triangular output waveforms [ 1] because of the ease with which such oscillators can operate over a wide frequency range including very low frequencies. This situation is also common in mono- r v, Zr t lithic oscillators [2] . Sinusoidal outputs are commonly de- sired in such oscillators and can be achieved by use of a non- linear circuit which produces an output sine wave from an input triangle wave. — — — — The above circuit function has been realized in the past by -I -I ----- means of a piecewise linear approximation using diode shaping J ‘“b ‘M VI networks [ 1] . However, a simpler approach and one well M suited to monolithic realization has been suggested by Grebene [3] . This is shown in Fig. 1 and consists simply of a differen- 77 tial pair with an appropriate value of emitter resistance R. -
ICL8038 TM D FO NDE MME ECO OT R N Data Sheet April 2001 File Number 2864.4
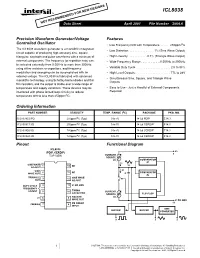
NS ESIG W D R NE ICL8038 TM D FO NDE MME ECO OT R N Data Sheet April 2001 File Number 2864.4 Precision Waveform Generator/Voltage Features Controlled Oscillator • Low Frequency Drift with Temperature...... 250ppm/oC The ICL8038 waveform generator is a monolithic integrated • LowDistortion...............1%(SineWaveOutput) tle circuit capable of producing high accuracy sine, square, 80 triangular, sawtooth and pulse waveforms with a minimum of • HighLinearity ...........0.1%(Triangle Wave Output) external components. The frequency (or repetition rate) can • Wide Frequency Range ............0.001Hzto300kHz - be selected externally from 0.001Hz to more than 300kHz using either resistors or capacitors, and frequency • VariableDutyCycle.....................2%to98% modulation and sweeping can be accomplished with an • HighLevelOutputs......................TTLto28V ci- external voltage. The ICL8038 is fabricated with advanced • Simultaneous Sine, Square, and Triangle Wave monolithic technology, using Schottky barrier diodes and thin Outputs e- film resistors, and the output is stable over a wide range of temperature and supply variations. These devices may be • Easy to Use - Just a Handful of External Components er- interfaced with phase locked loop circuitry to reduce Required o /Vo temperature drift to less than 250ppm/ C. e - Ordering Information ed PART NUMBER STABILITY TEMP. RANGE (oC) PACKAGE PKG. NO. il- o r) ICL8038CCPD 250ppm/ C(Typ) 0to70 14LdPDIP E14.3 tho ICL8038CCJD 250ppm/oC(Typ) 0to70 14LdCERDIP F14.3 ICL8038BCJD 180ppm/oC(Typ) -

Chapter 9. Fourier Series A. the Fourier Sine Series
Vector Spaces in Physics 8/6/2015 Chapter 9. Fourier Series A. The Fourier Sine Series The general solution. In Chapter 8 we found solutions to the wave equation for a string fixed at both ends, of length L, and with wave velocity v, yn x, t A n sin k n x cos n t k n n L 1 n 2L , n = 1, 2, 3, . (9-1) n v n n L v fn n 2L We are now going to proceed to describe an arbitrary motion of the string with both ends fixed in terms of a linear superposition of normal modes: nx general solution, string , (9-2) y x, t Ann sin cos t n1 L fixed at both ends nv where and the coefficients An are to be determined. Here are some things to be noted: n L (1) We are assuming for the moment that this equation is true - that is, in the limit where we include an infinite number of terms, that the infinite series is an arbitrarily good approximation to the solution y x, t . (2) Each term in the series is separately a solution to the wave equation satisfying the boundary conditions, and so the series sum itself is such a solution. (3) This series is sort of like an expansion of a vector in terms of a set of basis vectors. In this picture the coefficients An are the coordinates of the function . (4) We still have to specify initial conditions and find a method to ensure that they are satisfied. -
PWM Techniques: a Pure Sine Wave Inverter
2010-2011 Worcester Polytechnic Institute Major Qualifying Project PWM Techniques: A Pure Sine Wave Inverter Advisor: Professor Stephen J. Bitar, ECE Student Authors: Ian F. Crowley Ho Fong Leung 4/27/2011 Contents Figures ........................................................................................................................................................... 3 Abstract ......................................................................................................................................................... 6 Introduction .................................................................................................................................................. 7 Problem Statement ....................................................................................................................................... 8 Background Research.................................................................................................................................. 10 Prior Art ................................................................................................................................................... 10 Comparison of Commercially Available Inverters ............................................................................... 11 Examination of an Existing Design ...................................................................................................... 15 DC to AC Inversion ................................................................................................................................. -

Ee 2101 - Experiment 7 Rms and Average Values
EE 2101 - EXPERIMENT 7 RMS AND AVERAGE VALUES You may need to review the equations for calculating RMS and average values of a periodic waveform. Prior to performing this lab, determine the ratio between the RMS value and the peak value for sinusoid, triangle, and square waveforms. Also, note that for DC, the DC value equals the average value which equals the RMS value. For a waveform containing an AC signal with a DC offset, the RMS value is the square root of the sum of the squares of the AC and DC component RMS values. 1. Connect the output of the function generator in parallel with an analog AC voltmeter, a digital multimeter (DMM) set to read AC volts, and the oscilloscope. 2. Set the function generator for a 2-volt peak-to-peak sinusoid at 1 kHz and record both voltmeter readings. Compare to the calculated RMS value. 3. Repeat (2) for a triangle wave. Treat waveform as bipolar (-1 V to 1 V swing) for calculations. 4. Repeat (2) for a square wave. Treat waveform as bipolar (-1 V to 1 V swing) for calculations. You should find that neither of the meters yields the correct RMS value for all 3 waveforms. True RMS voltmeters are available at somewhat higher cost. Some of these block the DC component and read the RMS value of the AC signal only. Most AC meters respond to the average value of the rectified signal, since the average of any symmetrical AC waveform is zero. The meter output is then scaled to read the RMS value for a sinusoid. -

Measurements of AC Magnitude
Measurements of AC magnitude So far we know that AC voltage alternates in polarity and AC current alternates in direction. We also know that AC can alternate in a variety of different ways, and by tracing the alternation over time we can plot it as a “waveform.” We can measure the rate of alternation by measuring the time it takes for a wave to evolve before it repeats itself (the “period”), and express this as cycles per unit time, or “frequency.” In music, frequency is the same as pitch, which is the essential property distinguishing one note from another. However, we encounter a measurement problem if we try to express how large or small an AC quantity is. With DC, where quantities of voltage and current are generally stable, we have little trouble expressing how much voltage or current we have in any part of a circuit. But how do you grant a single measurement of magnitude to something that is constantly changing? One way to express the intensity, or magnitude (also called the amplitude), of an AC quantity is to measure its peak height on a waveform graph. This is known as the peak or crest value of an AC waveform: Figure below Peak voltage of a waveform. Another way is to measure the total height between opposite peaks. This is known as the peak-to-peak (P-P) value of an AC waveform: Figure below Peak-to-peak voltage of a waveform. Unfortunately, either one of these expressions of waveform amplitude can be misleading when comparing two different types of waves. -

Oscilloscope Fundamentals 03W-8605-4 Edu.Qxd 3/31/09 1:55 PM Page 2
03W-8605-4_edu.qxd 3/31/09 1:55 PM Page 1 Oscilloscope Fundamentals 03W-8605-4_edu.qxd 3/31/09 1:55 PM Page 2 Oscilloscope Fundamentals Table of Contents The Systems and Controls of an Oscilloscope .18 - 31 Vertical System and Controls . 19 Introduction . 4 Position and Volts per Division . 19 Signal Integrity . 5 - 6 Input Coupling . 19 Bandwidth Limit . 19 The Significance of Signal Integrity . 5 Bandwidth Enhancement . 20 Why is Signal Integrity a Problem? . 5 Horizontal System and Controls . 20 Viewing the Analog Orgins of Digital Signals . 6 Acquisition Controls . 20 The Oscilloscope . 7 - 11 Acquisition Modes . 20 Types of Acquisition Modes . 21 Understanding Waveforms & Waveform Measurements . .7 Starting and Stopping the Acquisition System . 21 Types of Waves . 8 Sampling . 22 Sine Waves . 9 Sampling Controls . 22 Square and Rectangular Waves . 9 Sampling Methods . 22 Sawtooth and Triangle Waves . 9 Real-time Sampling . 22 Step and Pulse Shapes . 9 Equivalent-time Sampling . 24 Periodic and Non-periodic Signals . 10 Position and Seconds per Division . 26 Synchronous and Asynchronous Signals . 10 Time Base Selections . 26 Complex Waves . 10 Zoom . 26 Eye Patterns . 10 XY Mode . 26 Constellation Diagrams . 11 Z Axis . 26 Waveform Measurements . .11 XYZ Mode . 26 Frequency and Period . .11 Trigger System and Controls . 27 Voltage . 11 Trigger Position . 28 Amplitude . 12 Trigger Level and Slope . 28 Phase . 12 Trigger Sources . 28 Waveform Measurements with Digital Oscilloscopes 12 Trigger Modes . 29 Trigger Coupling . 30 Types of Oscilloscopes . .13 - 17 Digital Oscilloscopes . 13 Trigger Holdoff . 30 Digital Storage Oscilloscopes . 14 Display System and Controls . 30 Digital Phosphor Oscilloscopes . -

Functional Waveforms for Electronics
4/6/2017 Functional Waveforms for Electronics Lesson 16 EET 150 Learning Objectives In this lesson you will: see typical waveforms used in electronic circuits learn how to identify these waveforms by their shape identify the amplitudes of these waves learn where these waves are used see what instruments can produce and measure waveforms 1 4/6/2017 Common Waveforms-Sine Wave Sine Waveform 3 3 Characteristics 2 Amplitude Measures RMS 1 Peak Peak-to-peak value Peak v(t) 0 to Peak value Amplitude Amplitude Peak 1 Measured with zero reference 2 3 Root Mean Square 3 0 2 4 6 8 10 (RMS) Value 0 t 10 Time 0.707 of Peak Value RMS factor of 0.707 only valid for Sine waves Sine waves used to test amplifiers Common Waveforms-Sine Wave Example What is peak-to-peak value of the waveform shown? What is peak 1.414 value of the V RMS 2 Vp waveform shown? 4 Vpp What is RMS value of the waveform shown? VRMS =0.707(2) VRMS = 1.414 V 2 4/6/2017 Common Waveforms-Sine Wave Sine wave with DC offset DC offset Sine Waveform raises entire 6 6 wave above zero 4 2.5 Waveform v(t) 2 Symmetric about 2.5 Amplitude +2.5 0 DC offsets can 2 be either 3 positive or 0 2 4 6 8 10 negative 0 t 10 Time Common Waveforms-Square Wave Square Wave Voltage Measures 3 3 Peak-to-peak value RMS 2 Peak value 1 Peak Peak Measured with zero s(t) to reference 0 Peak Amplitude 1 Root Mean Square (RMS) Value 2 3 Equals peak value 3 0 2 4 6 8 10 0 t 10 Square wave can Time Be off set with DC 3 4/6/2017 Common Waveforms-Pulse Train Pulse Train has only positive values Signal used in computer circuits. -

Odd Harmonics Exercise.Pdf
Odd Harmonics Exercise Display the power spectrum of a square wave 1. Create a new VI using a template: NEW -> VI from template ->Tutorial (Getting Started) -> Generate, Analyze, and Display. 2. Choose a 10 Hz square wave with a 50% duty cycle. Let's make it like a TTL clock - choose the amplitude, offset, etc to make the clock oscillate between 0 and +5 volts. Generate 500 samples, as fast as possible, at a rate of 1000 samples per second. 3. Set the parameters on the graphical indicator to your taste. You should be able to determine the period of the square wave, and the amplitudes (0 volts and 5 volts) should be fairly evident. Run your VI - show it to your neighbor. 4. Add a Spectral Measurements VI to the block diagram - attach a graphical indicator to its output. Wire the 10 Hz square wave to the new spectral analyzer. 5. Measure the power spectrum in dB with no windowing. Adjust the graphical indicator to display the power spectrum from 0 Hz to 200 Hz - show amplitudes from +10 dB to -40 dB. Run your VI - show it to your neighbor. Do you believe your spectrum plot? 6. Study the formula for the Fourier components of a square wave. Make a table - Fill Column 1 with the frequencies of the fundamental and the harmonics that you expect up to 200 Hz (Don't worry about DC for now). 7. Let's choose our 0 dB reference to be the fundamental. Calculate the expected amplitudes of the harmonics in dB ( This will yield "dB referenced to the fundamental"). -

Model 1011 Construction Manual
M O D E L 1 0 1 1 D i s c r e t e V o l t a g e C o n t r o l l e d O s c i l l a t o r Construction & Operation Guide R E V A - F O R P C B V 1 . 1 S L I G H T L Y N A S T Y E L E C T R O N I C S A D E L A I D E , A U S T R A L I A M O D E L 1 0 1 1 D i s c r e t e O s c i l l a t o r S P E C I F I C A T I O N S PHYSICAL FORM FACTOR: Loudest Warning / 4U WIDTH: 3NMW / 75.5mm HEIGHT: 175mm DEPTH: ~40mm from panel front inc. components PCB: 70 x 150mm, Two-Layer Double Sided CONNECTORS: 4mm Banana IDC power connector pinout. ELECTRICAL POWER: +12V, 0V, -12V CONSUMPTION:~40mA +12V Rail, ~30mA -12V Rail CONNECTOR: IDC 10-pin Shrouded Header, Eurorack Standard or MTA-156 4-Pin Header I/O IMPEDANCES: 100K input, 1K output (nominal) MTA-156 power connector pinout. INPUT RANGES (nominal) 1V/OCT: +/- 10V FM: +/- 5V LOG: +/- 5V SYMMETRY: +/- 5V SYNC: +/- 5V (falling-edge trigger) OUTPUT RANGES (nominal) OUTPUT A: +/- 5V OUTPUT B: +/- 5V SUBOCTAVE: +/- 5V Specifications 2 S L I G H T L Y N A S T Y E L E C T R O N I C S A D E L A I D E , A U S T R A L I A M O D E L 1 0 1 1 D i s c r e t e O s c i l l a t o r T A B L E O F C O N T E N T S SPECIFICATIONS Specifications / Power Requirements 2 INTRODUCTION Introduction 4 CIRCUIT OVERVIEW Circuit Overview 5 Exponential Converter 6 Sawtooth Core 8 Triangle / Sine Shapers 10 Pulse / Suboctave Shapers 10 Output Mixers / Amplifiers 12 CHOOSING COMPONENTS Bill Of Materials (BOM) 14 Choosing Components 15 Transistor Matching 16 CONSTRUCTION Construction Overview 18 Physical Assembly 20 CONTROLS Controls 21 CALIBRATION Calibration Overview 22 CV Scale 23 CV Offset 24 High Frequency Compensation 24 Triangle Adjustment 25 REFERENCE PCB Guide - Lower Board 26 PCB Guide - Upper Board 27 This document is best viewed in dual-page mode.