Semantics and Verification of Uml Activity Diagrams for Workflow Modelling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Activity Diagram Inheritance1
Activity Diagram Inheritance1 Arnd Schnieders, Frank Puhlmann Hasso-Plattner-Institute for IT Systems Engineering at the University of Potsdam {schnieders, puhlmann}@hpi.uni-potsdam.de Abstract This paper outlines the ongoing work on the realization of a flexible inheritance mechanism for Activity Diagrams that assures the maintenance of syntactical correctness for the derived Activity Diagrams. The objective is to support the reuse of process models especially by applying Activity Diagram inheritance as a variability mechanism in the context of product line oriented software development. Keywords: Activity Diagrams, domain engineering, process inheritance, variability mechanism 1. Introduction In industry similar products are frequently developed and produced as product lines. One of the main advantages is a gain of efficiency in development and production since parts, which are common for several product line members, can be reused optimally. This approach has been transferred successfully to software development and is also known by the name domain engineering. Variability mechanisms are thereby important for the effectiveness of domain engineering. A great number of variability mechanisms has already been published [5, 9, 11, 13, 18]. Unfortunately, existing variability mechanisms only refer to the static aspects of a software system’s design while the impact of variability mechanisms on the process view on the system has been strongly neglected. Therefore, the first contribution of this paper is to contribute to closing this gap by making the important variability mechanism inheritance available for process design models in order to derive process model variants. The second contribution of this paper is to show how the defined process inheritance mechanism is realized concretely for UML 2.0 Activity Diagrams. -
OMG Systems Modeling Language (OMG Sysml™) Tutorial 25 June 2007
OMG Systems Modeling Language (OMG SysML™) Tutorial 25 June 2007 Sanford Friedenthal Alan Moore Rick Steiner (emails included in references at end) Copyright © 2006, 2007 by Object Management Group. Published and used by INCOSE and affiliated societies with permission. Status • Specification status – Adopted by OMG in May ’06 – Finalization Task Force Report in March ’07 – Available Specification v1.0 expected June ‘07 – Revision task force chartered for SysML v1.1 in March ‘07 • This tutorial is based on the OMG SysML adopted specification (ad-06-03-01) and changes proposed by the Finalization Task Force (ptc/07-03-03) • This tutorial, the specifications, papers, and vendor info can be found on the OMG SysML Website at http://www.omgsysml.org/ 7/26/2007 Copyright © 2006,2007 by Object Management Group. 2 Objectives & Intended Audience At the end of this tutorial, you should have an awareness of: • Benefits of model driven approaches for systems engineering • SysML diagrams and language concepts • How to apply SysML as part of a model based SE process • Basic considerations for transitioning to SysML This course is not intended to make you a systems modeler! You must use the language. Intended Audience: • Practicing Systems Engineers interested in system modeling • Software Engineers who want to better understand how to integrate software and system models • Familiarity with UML is not required, but it helps 7/26/2007 Copyright © 2006,2007 by Object Management Group. 3 Topics • Motivation & Background • Diagram Overview and Language Concepts • SysML Modeling as Part of SE Process – Structured Analysis – Distiller Example – OOSEM – Enhanced Security System Example • SysML in a Standards Framework • Transitioning to SysML • Summary 7/26/2007 Copyright © 2006,2007 by Object Management Group. -

Plantuml Language Reference Guide (Version 1.2021.2)
Drawing UML with PlantUML PlantUML Language Reference Guide (Version 1.2021.2) PlantUML is a component that allows to quickly write : • Sequence diagram • Usecase diagram • Class diagram • Object diagram • Activity diagram • Component diagram • Deployment diagram • State diagram • Timing diagram The following non-UML diagrams are also supported: • JSON Data • YAML Data • Network diagram (nwdiag) • Wireframe graphical interface • Archimate diagram • Specification and Description Language (SDL) • Ditaa diagram • Gantt diagram • MindMap diagram • Work Breakdown Structure diagram • Mathematic with AsciiMath or JLaTeXMath notation • Entity Relationship diagram Diagrams are defined using a simple and intuitive language. 1 SEQUENCE DIAGRAM 1 Sequence Diagram 1.1 Basic examples The sequence -> is used to draw a message between two participants. Participants do not have to be explicitly declared. To have a dotted arrow, you use --> It is also possible to use <- and <--. That does not change the drawing, but may improve readability. Note that this is only true for sequence diagrams, rules are different for the other diagrams. @startuml Alice -> Bob: Authentication Request Bob --> Alice: Authentication Response Alice -> Bob: Another authentication Request Alice <-- Bob: Another authentication Response @enduml 1.2 Declaring participant If the keyword participant is used to declare a participant, more control on that participant is possible. The order of declaration will be the (default) order of display. Using these other keywords to declare participants -

Sysml Distilled: a Brief Guide to the Systems Modeling Language
ptg11539604 Praise for SysML Distilled “In keeping with the outstanding tradition of Addison-Wesley’s techni- cal publications, Lenny Delligatti’s SysML Distilled does not disappoint. Lenny has done a masterful job of capturing the spirit of OMG SysML as a practical, standards-based modeling language to help systems engi- neers address growing system complexity. This book is loaded with matter-of-fact insights, starting with basic MBSE concepts to distin- guishing the subtle differences between use cases and scenarios to illu- mination on namespaces and SysML packages, and even speaks to some of the more esoteric SysML semantics such as token flows.” — Jeff Estefan, Principal Engineer, NASA’s Jet Propulsion Laboratory “The power of a modeling language, such as SysML, is that it facilitates communication not only within systems engineering but across disci- plines and across the development life cycle. Many languages have the ptg11539604 potential to increase communication, but without an effective guide, they can fall short of that objective. In SysML Distilled, Lenny Delligatti combines just the right amount of technology with a common-sense approach to utilizing SysML toward achieving that communication. Having worked in systems and software engineering across many do- mains for the last 30 years, and having taught computer languages, UML, and SysML to many organizations and within the college setting, I find Lenny’s book an invaluable resource. He presents the concepts clearly and provides useful and pragmatic examples to get you off the ground quickly and enables you to be an effective modeler.” — Thomas W. Fargnoli, Lead Member of the Engineering Staff, Lockheed Martin “This book provides an excellent introduction to SysML. -
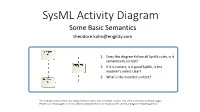
Sysml Activity Diagram Some Basic Semantics [email protected]
SysML Activity Diagram Some Basic Semantics [email protected] 1. Does this diagram follow all SysML rules, is it semantically correct? 2. If it is correct, is it good SysML, is the modeler’s intent clear? 3. What is the modeler’s intent? The semantics discussed are not comprehensive; rather, they are meant to cover only some of the most common usages. Readers are encouraged to consult additional documentation to obtain a fuller understanding of the SysML grammar. Activity Edges Control and Object Flows Control Flow Object Flow The most basic function of Activity Diagrams is the Object flow Pin. Control flow activity edge, commutation of information activity edge, solid line. among Actions. This is dashed line. accomplished by using either or both types of activity edges, as required: Best Practices 1. Use Object Flows whenever possible as they explicitly specify what is being communicated between Actions. 2. The two object flow constructs on the right are semantically identical. In general, the use of pins is preferred as it is more concise and allows for typecasting, should that be required. Activity Edge Semantics 1. An Action cannot start until all Control and Object tokens are received at the Action edge. 2. When an Action finishes, it provides all Control and Object tokens to their respective flows. Diagram Flow Discussion 1. When A finishes, it provides The Activity Diagram on the Control tokens to B and C at the left is grammatically correct. same time. However, the Control Flow 2. B then starts. When B finishes, it between A and B is provides a Control token to C. -

The Validation Possibility of Topological Functioning Model Using the Cameo Simulation Toolkit
The Validation Possibility of Topological Functioning Model using the Cameo Simulation Toolkit Viktoria Ovchinnikova and Erika Nazaruka Department of Applied Computer Science, Riga Technical University, Setas Street 1, Riga, Latvia Keywords: Topological Functioning Model, Execution Model, Foundational UML, UML Activity Diagram. Abstract: According to requirements provided by customers, the description of to-be functionality of software systems needs to be provided at the beginning of the software development process. Documentation and functionality of this system can be displayed as the Topological Functioning Model (TFM) in the form of a graph. The TFM must be correctly and traceably validated, according to customer’s requirements and verified, according to TFM construction rules. It is necessary for avoidance of mistakes in the early stage of development. Mistakes are a risk that can bring losses of resources or financial problems. The hypothesis of this research is that the TFM can be validated during this simulation of execution of the UML activity diagram. Cameo Simulation Toolkit from NoMagic is used to supplement UML activity diagram with execution and allows to simulate this execution, providing validation and verification of the diagram. In this research an example of TFM is created from the software system description. The obtained TFM is manually transformed to the UML activity diagram. The execution of actions of UML activity diagrams was manually implemented which allows the automatic simulation of the model. It helps to follow the traceability of objects and check the correctness of relationships between actions. 1 INTRODUCTION It represents the full scenario of system functionality and its relationships. Development of the software system is a complex The simulation of models can help to see some and stepwise process. -
UML Notation Guide
UML Notation Guide version 1.1 1 September 1997 Rational Software ■ Microsoft ■ Hewlett-Packard ■ Oracle Sterling Software ■ MCI Systemhouse ■ Unisys ■ ICON Computing IntelliCorp ■ i-Logix ■ IBM ■ ObjecTime ■ Platinum Technology ■ Ptech Taskon ■ Reich Technologies ■ Softeam ad/97-08-05 Copyright © 1997 Rational Software Corporation Copyright © 1997 Microsoft Corporation Copyright © 1997 Hewlett-Packard Company. Copyright © 1997 Oracle Corporation. Copyright © 1997 Sterling Software. Copyright © 1997 MCI Systemhouse Corporation. Copyright © 1997 Unisys Corporation. Copyright © 1997 ICON Computing. Copyright © 1997 IntelliCorp. Copyright © 1997 i-Logix. Copyright © 1997 IBM Corporation. Copyright © 1997 ObjecTime Limited. Copyright © 1997 Platinum Technology Inc. Copyright © 1997 Ptech Inc. Copyright © 1997 Taskon A/S. Copyright © 1997 Reich Technologies Copyright © 1997 Softeam Photocopying, electronic distribution, or foreign-language translation of this document is permitted, provided this document is reproduced in its entirety and accompanied with this entire notice, including the following statement: The most recent updates on the Unified Modeling Language are available via the worldwide web: http://www.rational.com/uml The UML logo is a trademark of Rational Software Corporation. Contents 1. DOCUMENT OVERVIEW 1 2. DIAGRAM ELEMENTS 3 2.1 Graphs and their Contents . 3 2.2 Drawing paths . 4 2.3 Invisible Hyperlinks And The Role Of Tools . 4 2.4 Background information . 4 2.5 String . 5 2.6 Name . 6 2.7 Label . 7 2.8 Keywords. 8 2.9 Expression . 8 2.10 Note . 10 2.11 Type-Instance Correspondence . 11 3. MODEL MANAGEMENT 13 3.1 Packages and Model Organization . 13 4. GENERAL EXTENSION MECHANISMS 16 4.1 Constraint and Comment . 16 4.2 Element Properties. -

State and Activity Diagrams in UML Last Revised December 4, 2018 Objectives: 1
CPS122 Lecture: State and Activity Diagrams in UML last revised December 4, 2018 Objectives: 1. To show how to create and read State Diagrams 2. To introduce UML Activity Diagrams Materials: 1. Answers to quick check questions from chapter 7 plus chapter 8 a, b, g 2. Demonstration of “Racers” program 3. Handout and Projectable on Web: State diagram for Session 4. Handout: Code for Session class performSession() method 5. Projectable of text figures 7.12, 7.13 6. Handout of Activity diagram for Racers 7. Projectable of text figure 8.10 I. Introduction A.Go over quick check questions chapter 7 + chapter 8 a, b, g only B. We have drawn a distinction between the static aspects of a system and its dynamic aspects. The static aspects of a system have to do with its component parts and how they are related to one another; the dynamic aspects of a system have to do with how the components interact with one another and/or change state internally over time. C. We have been looking at one aspect of the dynamic behavior of a system - the way various objects interact to carry out the various use cases. We have looked at two ways of describing this: 1. Sequence diagrams 2. Communication diagrams D.We now want to look two additional aspects of dynamic behavior !1 1. How an individual object changes state internally over time. a) Example: As part of doing the domain analysis of a traffic light system, it is important to note that individual signals go through a series of states in a prescribed order - modeled by the following state diagram: ! (Note: this is correct for the US but not for all countries in the world!) An important “business rule” that any traffic light system must obey is that the light must be yellow for a certain minimum period of time (related to vehicle speed in the intersection) between displaying green and displaying red. -

During the Early Days of Computing, Computer Systems Were Designed to Fit a Particular Platform and Were Designed to Address T
TAGDUR: A Tool for Producing UML Diagrams Through Reengineering of Legacy Systems Richard Millham, Hongji Yang De Montfort University, England [email protected] & [email protected] Abstract: Introducing TAGDUR, a reengineering tool that first transforms a procedural legacy system into an object-oriented, event-driven system and then models and documents this transformed system through a series of UML diagrams. Keywords: TAGDUR, Reengineering, Program Transformation, UML In this paper, we introduce TAGDUR (Transformation from a sequential-driven, procedural structured to an and Automatic Generation of Documentation in UML event-driven, component-based architecture requires a through Reengineering). TAGDUR is a reengineering tool transformation of the original system to an object-oriented, designed to address the problems frequently found in event-driven system. Object orientation, because it many legacy systems such as lack of documentation and encapsulates methods and their variables into modules, is the need to transform the present structure to a more well-suited to a multi-tiered Web-based architecture modern architecture. TAGDUR first transforms a where pieces of software must be defined in encapsulated procedurally-structured system to an object-oriented, modules with cleanly-defined interfaces. This particular event-driven architecture. Then TAGDUR generates legacy system is procedural-driven and is batch-oriented; documentation of the structure and behavior of this a move to a Web-based architecture requires a real-time, transformed system through a series of UML (Unified event-driven response rather than a procedural invocation. Modeling Language) diagrams. These diagrams include class, deployment, sequence, and activity diagrams. Object orientation promises other advantages as well. -

Activity Diagrams Analytical Tools
A/L ICT Activity Diagrams Analytical Tools Lecturer - Teran Subasinghe AURORA COMPUTER STUDIES 1 ACTIVITY DIAGRAMS Activity diagrams, which are related to program flow plans (flowcharts), are used to illustrate activities. In the external view, we use activity diagrams for the description of those business processes that describe the functionality of the business system. Contrary to use case diagrams, in activity diagrams it is obvious whether actors can perform business use cases together or independently from one another. The following illustrates a basic activity diagram: Activity diagram “Passenger Services” with a low level of detail (“High Level”) LECTURER - TERAN SUBASINGHE 1 2 Activity diagram of the activity “Passenger checks in” ACTIVITY An activity diagram illustrates one individual activity. In our context, an activity represents a business process. Fundamental elements of the activity are actions and control elements (decision, division, merge, initiation, end, etc.): Lecturer - Teran Subasinghe | AURORA COMPUTER STUDIES 3 ACTION An action is an individual step within an activity, for example, a calculation step that is not deconstructed any further. That does not necessarily mean that the action cannot be subdivided in the real world, but in this diagram will not be refined any further: The action can possess input and output information. The output of one action can be the input of a subsequent action within an activity. Specific actions are calling other actions, receiving an event, and sending signals. CALLING AN ACTIVITY (ACTION) With this symbol an activity can be called from within another activity. Calling, in itself, is an action; the outcome of the call is another activity: In this way, activities can be nested within each other and can be represented with different levels of detail. -

UML Activity Diagram Semantics and Automated GUI Prototyping
Journal of International Technology and Information Management Volume 14 Issue 3 Article 4 2005 UML Activity Diagram Semantics and Automated GUI Prototyping Nancy Winniford Ashley Washington State University, WA Timothy E. Meehan Nuvotec, Inc., WA Norman Carr Nuvotec, Inc., WA Follow this and additional works at: https://scholarworks.lib.csusb.edu/jitim Part of the Business Intelligence Commons, E-Commerce Commons, Management Information Systems Commons, Management Sciences and Quantitative Methods Commons, Operational Research Commons, and the Technology and Innovation Commons Recommended Citation Ashley, Nancy Winniford; Meehan, Timothy E.; and Carr, Norman (2005) "UML Activity Diagram Semantics and Automated GUI Prototyping," Journal of International Technology and Information Management: Vol. 14 : Iss. 3 , Article 4. Available at: https://scholarworks.lib.csusb.edu/jitim/vol14/iss3/4 This Article is brought to you for free and open access by CSUSB ScholarWorks. It has been accepted for inclusion in Journal of International Technology and Information Management by an authorized editor of CSUSB ScholarWorks. For more information, please contact [email protected]. UML Activity Diagram Semantics Journal of International Technology and Information Management UML Activity Diagram Semantics and Automated GUI Prototyping Nancy Winniford Ashley Washington State University, Richland, WA Timothy E. Meehan Nuvotec, Inc., Richland, WA Norman Carr Nuvotec, Inc., Richland, WA ABSTRACT Extended Activity Semantics (XAS) is a notation which can be used with Unified Modeling Language (UML) activity diagrams to specify user interactions with a system and to automatically generate a prototype of the graphical user interface (GUI) that would be used in these interactions. XAS has been incorporated in a CASE tool, Guibot, which has been developed as a plug-in for Rational Rose, a leading UML tool. -
Fakulta Informatiky UML Modeling Tools for Blind People Bakalářská
Masarykova univerzita Fakulta informatiky UML modeling tools for blind people Bakalářská práce Lukáš Tyrychtr 2017 MASARYKOVA UNIVERZITA Fakulta informatiky ZADÁNÍ BAKALÁŘSKÉ PRÁCE Student: Lukáš Tyrychtr Program: Aplikovaná informatika Obor: Aplikovaná informatika Specializace: Bez specializace Garant oboru: prof. RNDr. Jiří Barnat, Ph.D. Vedoucí práce: Mgr. Dalibor Toth Katedra: Katedra počítačových systémů a komunikací Název práce: Nástroje pro UML modelování pro nevidomé Název práce anglicky: UML modeling tools for blind people Zadání: The thesis will focus on software engineering modeling tools for blind people, mainly at com•monly used models -UML and ERD (Plant UML, bachelor thesis of Bc. Mikulášek -Models of Structured Analysis for Blind Persons -2009). Student will evaluate identified tools and he will also try to contact another similar centers which cooperate in this domain (e.g. Karlsruhe Institute of Technology, Tsukuba University of Technology). The thesis will also contain Plant UML tool outputs evaluation in three categories -students of Software engineering at Faculty of Informatics, MU, Brno; lecturers of the same course; person without UML knowledge (e.g. customer) The thesis will contain short summary (2 standardized pages) of results in English (in case it will not be written in English). Literatura: ARLOW, Jim a Ila NEUSTADT. UML a unifikovaný proces vývoje aplikací : průvodce analýzou a návrhem objektově orientovaného softwaru. Brno: Computer Press, 2003. xiii, 387. ISBN 807226947X. FOWLER, Martin a Kendall SCOTT. UML distilled : a brief guide to the standard object mode•ling language. 2nd ed. Boston: Addison-Wesley, 2000. xix, 186 s. ISBN 0-201-65783-X. Zadání bylo schváleno prostřednictvím IS MU. Prohlašuji, že tato práce je mým původním autorským dílem, které jsem vypracoval(a) samostatně.