Earthquake Ground Motion Estimation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Seismic Resilience Report Is Located on the Seismic Resilience Sharepoint Site
REPORT SEISMIC RESILIENCE FIRST BIENNIAL REPORT The Metropolitan Water District of Southern California 700 N. Alameda Street, Los Angeles, California 90012 Report No. 1551 February 2018 The Metropolitan Water District of Southern California Seismic Resilience First Biennial Report SEISMIC RESILIENCE FIRST BIENNIAL REPORT Prepared By: The Metropolitan Water District of Southern California 700 North Alameda Street Los Angeles, California 90012 Report Number 1551 February 2018 Report No. 1551 – February 2018 iii The Metropolitan Water District of Southern California Seismic Resilience First Biennial Report Copyright © 2018 by The Metropolitan Water District of Southern California. The information provided herein is for the convenience and use of employees of The Metropolitan Water District of Southern California (MWD) and its member agencies. All publication and reproduction rights are reserved. No part of this publication may be reproduced or used in any form or by any means without written permission from The Metropolitan Water District of Southern California. Any use of the information by any entity other than Metropolitan is at such entity's own risk, and Metropolitan assumes no liability for such use. Prepared under the direction of: Gordon Johnson Chief Engineer Prepared by: Robb Bell Engineering Services Don Bentley Water Resource Management Winston Chai Engineering Services David Clark Engineering Services Greg de Lamare Engineering Services Ray DeWinter Administrative Services Edgar Fandialan Water Resource Management Ricardo Hernandez -

Stress Triggering in Thrust and Subduction Earthquakes and Stress
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109, B02303, doi:10.1029/2003JB002607, 2004 Stress triggering in thrust and subduction earthquakes and stress interaction between the southern San Andreas and nearby thrust and strike-slip faults Jian Lin Department of Geology and Geophysics, Woods Hole Oceanographic Institution, Woods Hole, Massachusetts, USA Ross S. Stein U.S. Geological Survey, Menlo Park, California, USA Received 30 May 2003; revised 24 October 2003; accepted 20 November 2003; published 3 February 2004. [1] We argue that key features of thrust earthquake triggering, inhibition, and clustering can be explained by Coulomb stress changes, which we illustrate by a suite of representative models and by detailed examples. Whereas slip on surface-cutting thrust faults drops the stress in most of the adjacent crust, slip on blind thrust faults increases the stress on some nearby zones, particularly above the source fault. Blind thrusts can thus trigger slip on secondary faults at shallow depth and typically produce broadly distributed aftershocks. Short thrust ruptures are particularly efficient at triggering earthquakes of similar size on adjacent thrust faults. We calculate that during a progressive thrust sequence in central California the 1983 Mw = 6.7 Coalinga earthquake brought the subsequent 1983 Mw = 6.0 Nun˜ez and 1985 Mw = 6.0 Kettleman Hills ruptures 10 bars and 1 bar closer to Coulomb failure. The idealized stress change calculations also reconcile the distribution of seismicity accompanying large subduction events, in agreement with findings of prior investigations. Subduction zone ruptures are calculated to promote normal faulting events in the outer rise and to promote thrust-faulting events on the periphery of the seismic rupture and its downdip extension. -

Loss Estimates for a Puente Hills Blind-Thrust Earthquake in Los Angeles, California
Loss Estimates for a Puente Hills Blind-Thrust Earthquake in Los Angeles, California a) b) c) Edward H. Field, M.EERI, Hope A. Seligson, M.EERI, Nitin Gupta, c) c) d) Vipin Gupta, Thomas H. Jordan, and Kenneth W. Campbell, M.EERI Based on OpenSHA and HAZUS-MH, we present loss estimates for an earthquake rupture on the recently identified Puente Hills blind-thrust fault beneath Los Angeles. Given a range of possible magnitudes and ground mo- tion models, and presuming a full fault rupture, we estimate the total eco- nomic loss to be between $82 and $252 billion. This range is not only con- siderably higher than a previous estimate of $69 billion, but also implies the event would be the costliest disaster in U.S. history. The analysis has also pro- vided the following predictions: 3,000–18,000 fatalities, 142,000–735,000 displaced households, 42,000–211,000 in need of short-term public shelter, and 30,000–99,000 tons of debris generated. Finally, we show that the choice of ground motion model can be more influential than the earthquake magni- tude, and that reducing this epistemic uncertainty (e.g., via model improve- ment and/or rejection) could reduce the uncertainty of the loss estimates by up to a factor of two. We note that a full Puente Hills fault rupture is a rare event (once every ϳ3,000 years), and that other seismic sources pose signifi- cant risk as well. [DOI: 10.1193/1.1898332] INTRODUCTION Recent seismologic and geologic studies have revealed a dangerous fault system, the Puente Hills blind thrust, buried directly beneath Los Angeles, California (Shaw and Shearer 1999, Shaw et al. -
Objectives the Multiple Large Blind Thrust Faults Capable of Generating
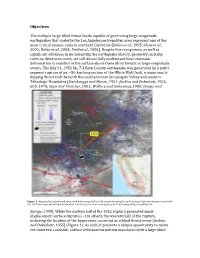
Objectives The multiple large blind thrust faults capable of generating large-magnitude earthquakes that underlie the Los Angeles metropolitan area represent one of the most critical seismic risks in southern California [Dolan et al., 1995; Shaw et al., 2002; Dolan et al., 2003; Field et al., 2005]. Despite this recognition, as well as significant advances in documenting the earthquake history, geometry, and slip rates on these structures, we still do not fully understand how coseismic deformation is manifest at the surface above these blind thrusts in large-magnitude events. The July 21, 1952 Mw 7.3 Kern County earthquake was generated by a multi- segment rupture of an ~50-km-long section of the White Wolf fault, a major south- dipping thrust fault beneath the southernmost San Joaquin Valley and western Tehachapi Mountains [Steinbrugge and Moran, 1954; Jenkins and Oakeshott, 1955; Bolt, 1978; Stein and Thatcher, 1981; Wallace and Junkyoung, 1989; Dreger and AOI Figure 1. Regional setting of study area, with quaternary faults (red), seismicity (purple), and coseismic deformation associated with the 1952 Kern County Earthquake denoted. Location of the main area of focus for this study (yellow) is highlighted. Savage, 1999]. While the eastern half of the 1952 rupture generated small- displacement surface rupture (~1m offset), the western half of the rupture, including the location of the hypocenter, occurred as a blind thrust event [Jenkins and Oakeshott, 1955] (Figure 1). As such, it presents a unique opportunity to relate the observed coseismic surface deformation pattern associated with a large blind thrust earthquake to the geometry and location of folding related to previous events in the subsurface, thus informing our ability to infer this relationship more confidently for other blind thrusts for which coseismic deformation has not yet occurred in the historic era, or for which the acquisition of such data is difficult due to circumstances of geologic conditions or land use. -

Coseismic Fault-Related Fold Model, Growth Structure, and the Historic
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 112, B03S07, doi:10.1029/2006JB004377, 2007 Click Here for Full Article Coseismic fault-related fold model, growth structure, and the historic multisegment blind thrust earthquake on the basement-involved Yoro thrust, central Japan Tatsuya Ishiyama,1 Karl Mueller, 2 Hiroshi Sato,3 and Masami Togo4 Received 6March 2006; revised 16 January 2007; accepted 5February 2007; published28March 2007. [ 1 ] We use high-resolution seismic reflection profiles, boring transects, and mapping of fold scarps that deform late Quaternary and Holocene sediments to define the kinematic evolution, subsurface geometry,coseismic behavior,and fault slip rates for an active, basement-involved blind thrust system in central Japan. Coseismic fold scarps on the Yoro basement-involved fold are defined by narrow fold limbs and angular hinges on seismic profiles, suggesting that at least 3.9 km of fault slip is consumed by wedge thrust folding in the upper 10 km of the crust. The close coincidence and kinematic link between folded horizons and the underlying thrust geometry indicate that the Yoro basement- involved fold has accommodated slip at an average rate of 3.2 ±0.1 mm/yr on ashallowly west dipping thrust fault since early Pleistocene time. Past large-magnitude earthquakes, including an historic M 7.7 event in A.D. 1586 that occurred on the Yoro blind thrust, are shown to have produced discrete folding by curved hinge kink band migration above the eastward propagating tip of the wedge thrust. Coseismic fold scarps formed during the A.D. 1586 earthquake can be traced along the en echelon active folds that extend for at least 60 km, in spite of different styles of folding along the apparently hard-linked Nobi-Ise blind thrust system. -

Earthquake Prediction by Animals: Evolution and Sensory Perception by Joseph L
Bulletin of the Seismological Society of America, 90, 2, pp. 312±323, April 2000 Earthquake Prediction by Animals: Evolution and Sensory Perception by Joseph L. Kirschvink Abstract Animals living within seismically active regions are subjected episod- ically to intense ground shaking that can kill individuals through burrow collapse, egg destruction, and tsunami action. Although anecdotal and retrospective reports of animal behavior suggest that although many organisms may be able to detect an impending seismic event, no plausible scenario has been presented yet through which accounts for the evolution of such behaviors. The evolutionary mechanism of ex- aptation can do this in a two-step process. The ®rst step is to evolve a vibration- triggered early warning response which would act in the short time interval between the arrival of P and S waves. Anecdotal evidence suggests this response already exists. Then if precursory stimuli also exist, similar evolutionary processes can link an animal's perception of these stimuli to its P-wave triggered response, yielding an earthquake predictive behavior. A population-genetic model indicates that such a seismic-escape response system can be maintained against random mutations as a result of episodic selection that operates with time scales comparable to that of strong seismic events. Hence, additional understanding of possible earthquake precursors that are presently outside the realm of seismology might be gleaned from the study of animal behavior, sensory physiology, and genetics. A brief review of possible seismic precursors suggests that tilt, hygroreception (humidity), electric, and mag- netic sensory systems in animals could be linked into a seismic escape behavioral system. -

Tsunami Hazards Associated with the Catalina Fault in Southern California
PROOF COPY 001403EQS Tsunami Hazards Associated with the Catalina Fault in Southern California a) b) b) Mark R. Legg, M.EERI, Jose C. Borrero, and Costas E. Synolakis We investigate the tsunami hazard associated with the Catalina Fault off- shorePROOF of southern California. COPY Realistic faulting001403EQS parameters are used to match coseismic displacements to existing sea floor topography. Several earthquake scenarios with moment magnitudes ranging between 7.0 and 7.6 are used as initial conditions for tsunami simulations, which predict runup of up to 4 m. Normalizing runup with the maximum uplift identifies areas susceptible to tsunami focusing and amplification. Several harbors and ports in southern California lie in areas where models predict tsunami amplification. Return periods are estimated by dividing the modeled seafloor uplift per event by the observed total uplift of the Santa Catalina Island platform multiplied by the time since the uplift began. The analysis yields return periods between 2,000 to 5,000 years for the Catalina Fault alone, and 200 to 500 years when all offshore faults are considered. [DOI: 10.1193/1.1773592] INTRODUCTION Locally generated tsunamis from major active faults offshore southern California threaten nearby coastal cities. Disruption of operations at port facilities due to tsunami attack could severely impact the regional and national economies. Historically, the po- tential for tsunami generation from local sources was believed to be insignificant be- cause most of the faulting in the southern California region is strike-slip in character. Yet major thrust and reverse faulting occurs throughout the western Transverse Ranges (WTR), including historical tsunami occurrence following strong earthquakes in the Santa Barbara Channel region and west of Point Conception (McCulloch 1985, Lander et al. -
FINAL REPORT Element
FINAL REPORT IMPROVED PREDICTION METHOD FOR TIME HISTORIES OF NEAR-FIELD GROUND MOTIONS WITH APPLICATION TO SOUTHERN CALIFORNIA Award: 04HQGR0059 Element III: Evaluate Urban Hazard and Risk Ralph J. Archuleta Pengcheng Liu Institute for Crustal Studies University of California, Santa Barbara Research supported by the U. S. Geological Survey (USGS), Department of Interior, under USGS award number 04HQGR0059. The views and conclusions contained in this document are those of the authors and should not be interpreted as necessarily representing the official policies, either expressed or implied, of the U. S. Government. Award: 04HQGR0059 IMPROVED PREDICTION METHOD FOR TIME HISTORIES OF NEAR- FIELD GROUND MOTIONS WITH APPLICATION TO SOUTHERN CALIFORNIA Ralph J. Archuleta Pengcheng Liu Institute for Crustal Studies University of California, Santa Barbara 93106 Phone: 805-893-8441 FAX: 805-893-8649 Email: [email protected] Email: [email protected] Technical Abstract Abstract We present a new method for calculating broadband time histories of ground motion based on a hybrid low-frequency/high-frequency approach with correlated source parameters. Using a finite-difference method we calculate low-frequency synthetics (< ~1Hz) in a 3D velocity structure. We also compute broadband synthetics in a 1D velocity model using a frequency- wavenumber method. The low frequencies from the 3D calculation are combined with the high frequencies from the 1D calculation using matched filtering at a cross-over frequency of 1Hz. The source description, common to both the 1D and 3D synthetics, is based on correlated random distributions for the slip amplitude, rupture velocity, and rise time on the fault. This source description allows for the specification of source parameters independent of any a priori inversion results. -
Seismic Constraints and Coulomb Stress Changes of a Blind Thrust Fault System, 2: Northridge, California
Seismic Constraints and Coulomb Stress Changes of a Blind Thrust Fault System, 2: Northridge, California By Ross S. Stein1 and Jian Lin2 2006 Open-File Report 2006–1158 1 U.S. Geological Survey, Menlo Park, Calif. 2 Woods Hole Oceanographic Institution, Woods Hole, Mass. U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior Dirk Kempthorne, Secretary U.S. Geological Survey P. Patrick Leahy, Acting Director U.S. Geological Survey, Reston, Virginia 2006 Revised and reprinted: 2006 For product and ordering information: World Wide Web: http://www.usgs.gov/pubprod Telephone: 1-888-ASK-USGS For more information on the USGS—the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment: World Wide Web: http://www.usgs.gov Telephone: 1-888-ASK-USGS Suggested citation: Stein, R.S., and Lin, J., 2006, Seismic constraints and Coulomb stress changes of a blind thrust fault system, 2: Northridge, California: U.S. Geological Survey Open-File Report 2006-1158, 17 p. [available on the World Wide Web at URL http://pubs.usgs.gov/of/2006/1158/ ]. Any use of trade, product, or firm names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Although this report is in the public domain, permission must be secured from the individual copyright owners to reproduce any copyrighted material contained within this report. 2 Summary We review seismicity, surface faulting, and Coulomb stress changes associated with the 1994 Northridge, California, earthquake. All of the observed surface faulting is shallow, extending meters to tens of meters below the surface. -

The Hayward Fault
Scenario for a Magnitude 7.0 Earthquake on the Hayward Fault A report produced by the Earthquake Engineering Research Institute with support from the Federal Emergency Management Agency September 1996 Earthquake Engineering Research Institute HF-96 01996 Earthquake Engineering Research Institute (EERI), Oakland, California 94612-1934. All rights reserved. No part of this book may be reproduced in any form or by any means with- out the prior written permission of the publisher, Earthquake Engineering Research Institute, 499 14th Street, Suite 320, Oakland, CA 94612-1934. Printed in the United States of America ISBN #0-943 198-55-0 EERI Publication No. HF-96 Notice: Publication of this report was partially supported by the Federal Emergency Man- agement Agency under Cooperative Agreement EMW-92-K-395 5. This report is published by the Earthquake Engineering Research Institute, a nonprofit corporation for the development and dissemination of knowledge on the problems of destruc- tive earthquakes. The symposium on which this report is based was supported by EERI. Any opinions, findings, conclusions, or recommendations expressed herein are the authors’ and do not necessarily reflect the views of the Federal Emergency Management Agency, the authors’ organizations, or EERI. Managing Editor: Frances M. Christie Development Editor: Sarah K. Nathe Production Editor: Virginia A. Rich Layout and Production: James W. Larimore Design Assistance: Wendy Warren Proofreader: Nancy Riddiough Chapter Opener Maps: Terrance Mark Tape Transcription: Helen B. Harvey Cover Design: Lynne Garell Cover Illustration: Terrance Mark Copies of this publication may be purchased for $1 5 prepaid from EERI, 499-14th Street, Suite 320, Oakland, CA 94612-1934; telephone (510) 451-0905, fax (510) 451-541 1; e-mail [email protected] Web site http://www.eeri.org. -

Kanamori Layout.Indd MH.Indd
NATURE|Vol 451|17 January 2008|doi:10.1038/nature06585 YEAR OF PLANET EARTH FEATURE Earthquake physics and real-time seismology Hiroo Kanamori The past few decades have witnessed significant progress in our understanding of the physics and complexity of earthquakes. This has implications for hazard mitigation. Simply stated, an earthquake is caused by slip on a fault. However, the for seismic hazard but also provides important clues about the fun- slip motion is complex, reflecting the variation in basic physics that damental physics of earthquakes. Subduction-zone earthquakes with governs fault motion in different tectonic environments. Seismologists slow slip tend to generate unexpectedly large tsunamis (for instance, can learn a great deal about earthquakes from studying the details of the 2006 Java tsunami, represented by a red curve in Fig. 2a). Those slip motion. earthquakes that occur within the subducting slab (for example, the Kuril Islands earthquake of 2007, denoted by a black curve in Fig. 2a) The size of great earthquakes tend to have faster slip and can cause much stronger shaking than those Seismic slip motion involves a broad ‘period’ (or frequency) range, at with comparable magnitudes that occur on the subduction boundary least from 0.1 s to 1 hour, and a wide range of amplitudes, roughly from (for example, the Kuril Islands earthquake of 2006, denoted by a blue 1 µm to 30 m. Most seismographs available before the 1960s could record curve in Fig. 2a). At present, these special characteristics are not fully ground motions over only short periods — less than 30 s — which pre- considered in hazard-mitigation practices, and they need to be more vented seismologists from studying important details of earthquake explicitly considered in the future. -

The Surface/Subsurface Relationship Between Drainage and Buried Faults As Observed in the Andean Foreland of Central-Western Argentina
THE SURFACE/SUBSURFACE RELATIONSHIP BETWEEN DRAINAGE AND BURIED FAULTS AS OBSERVED IN THE ANDEAN FORELAND OF CENTRAL-WESTERN ARGENTINA Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Peter Andreas Enderlin, B.S. Graduate Program in Geological Sciences The Ohio State University 2010 Master’s Examination Committee: Dr. Lindsay Schoenbohm, Advisor Dr. Ian Howat Dr. Lawrence Krissek Copyright by Peter Andreas Enderlin 2010 ABSTRACT The Andean foreland of central-western Argentina (30°-35°S) is characterized by the interaction of the east-vergent, thick-skinned Sierras Pampeanas and the west-vergent, thin-skinned Precordillera. Blind thrust faults are associated with the transition between these structural provinces, and large earthquakes have resulted from their interplay beneath the cities of Mendoza and San Juan. This study develops and applies a geomorphic approach to reveal buried tectonic features at both the scale of individual structures and the regional-scale. We interpret changes in bank heights and sinuosity from three rivers located between the Cerro Salinas and Montecito anticlines to suggest the existence of a third, buried structure. Inflections in elevation swaths indicate these three structures may be connected by the southern continuation of the Cerro Salinas thrust, which would tie the three to the Sierras Pampeanas structural province. Regional- scale drainage in the Andean foreland shows that neither current- nor paleorivers have flowed across the Alto del Desaguadero area. Inflections in W-E and N-S elevation swaths across this area suggest the influence of tectonic forcing, possibly due to a rising basement structure similar to the Sierra Pie de Palo to the north.