Beam Auto Pilot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Artificial Intelligence: Soon to Be the World’S Greatest Intelligence, Or Just a Wild Dream? Edward R
Johnson & Wales University ScholarsArchive@JWU Academic Symposium of Undergraduate College of Arts & Sciences Scholarship 3-22-2010 Artificial Intelligence: Soon to be the world’s greatest intelligence, or just a wild dream? Edward R. Kollett Johnson & Wales University - Providence, [email protected] Follow this and additional works at: https://scholarsarchive.jwu.edu/ac_symposium Part of the Artificial Intelligence and Robotics Commons, Arts and Humanities Commons, Nanoscience and Nanotechnology Commons, and the Social and Behavioral Sciences Commons Repository Citation Kollett, Edward R., "Artificial Intelligence: Soon to be the world’s greatest intelligence, or just a wild dream?" (2010). Academic Symposium of Undergraduate Scholarship. 3. https://scholarsarchive.jwu.edu/ac_symposium/3 This Research Paper is brought to you for free and open access by the College of Arts & Sciences at ScholarsArchive@JWU. It has been accepted for inclusion in Academic Symposium of Undergraduate Scholarship by an authorized administrator of ScholarsArchive@JWU. For more information, please contact [email protected]. Artificial Intelligence: Soon to be the world’s greatest intelligence, or just a wild dream? Edward Kollett Johnson & Wales University Honors Program 2009 Edward Kollett, Page 2 Artificial Intelligence is a term, coined by John McCarthy in 1956, that “in its broadest sense would indicate the ability of an artifact to perform the same kinds of functions that characterize human thought processes” (“Artificial Intelligence”). Typically, it is used today to refer to a computer program that is trying to simulate the human brain, or at least parts of it. Attempts to recreate the human brain have been a goal of mankind for centuries, but only recently, as computers have become as powerful as they are now, does the goal of a fully automated robot with human intelligence and emotional capabilities seems to be within reach. -

Kinematic Modeling of a Rhex-Type Robot Using a Neural Network
Kinematic Modeling of a RHex-type Robot Using a Neural Network Mario Harpera, James Paceb, Nikhil Guptab, Camilo Ordonezb, and Emmanuel G. Collins, Jr.b aDepartment of Scientific Computing, Florida State University, Tallahassee, FL, USA bDepartment of Mechanical Engineering, Florida A&M - Florida State University, College of Engineering, Tallahassee, FL, USA ABSTRACT Motion planning for legged machines such as RHex-type robots is far less developed than motion planning for wheeled vehicles. One of the main reasons for this is the lack of kinematic and dynamic models for such platforms. Physics based models are difficult to develop for legged robots due to the difficulty of modeling the robot-terrain interaction and their overall complexity. This paper presents a data driven approach in developing a kinematic model for the X-RHex Lite (XRL) platform. The methodology utilizes a feed-forward neural network to relate gait parameters to vehicle velocities. Keywords: Legged Robots, Kinematic Modeling, Neural Network 1. INTRODUCTION The motion of a legged vehicle is governed by the gait it uses to move. Stable gaits can provide significantly different speeds and types of motion. The goal of this paper is to use a neural network to relate the parameters that define the gait an X-RHex Lite (XRL) robot uses to move to angular, forward and lateral velocities. This is a critical step in developing a motion planner for a legged robot. The approach taken in this paper is very similar to approaches taken to learn forward predictive models for skid-steered robots. For example, this approach was used to learn a forward predictive model for the Crusher UGV (Unmanned Ground Vehicle).1 RHex-type robot may be viewed as a special case of skid-steered vehicle as their rotating C-legs are always pointed in the same direction. -
Robotics Section Guide for Web.Indd
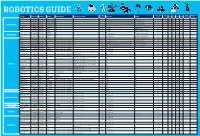
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Towards Pronking with a Hexapod Robot
Towards pronking with a hexapod robot Dave McMordie Department of Electrical Engineering McGill University, Montreal, Canada July, 2002 A thesis submitted to the Faculty of Graduate 5tudies and Research in partial fulfillment of the requirements of the degree Master of Engineering © Dave McMordie, 2002 National Library Bibliothèque nationale 1+1 of Canada du Canada Acquisitions and Acquisisitons et Bibliographie Services services bibliographiques 395 Wellington Street 395, rue Wellington Ottawa ON K1A DN4 Ottawa ON K1A DN4 Canada Canada Your file Votre référence ISBN: 0-612-85890-1 Our file Notre référence ISBN: 0-612-85890-1 The author has granted a non L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or sell reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or electronic formats. la forme de microfiche/film, de reproduction sur papier ou sur format électronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts from it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reproduced without the author's ou aturement reproduits sans son permission. autorisation. Canada Abstract RHex is a robotic hexapod with springy legs and just six actuated degrees of freedom. This work presents the development of a pronking gait for RHex, extending its efficiency and speed by exploiting its springy legs for hopping. -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Robonaut 2 Fact Sheet
National Aeronautics and Space Administration Robonaut 2 facts NASA Almost 200 people from 15 countries have visited the International Space Station, but the orbiting complex has only had human crew members – until now. Robonaut 2, the latest generation of the Robonaut astronaut helpers, launched to the space station aboard space shuttle Discovery on the STS-133 mission in February 2011. It is the fi rst humanoid robot in space, and although its primary job for now is demonstrating to engineers how dexterous robots behave in space, the hope is that, through upgrades and advancements, it could one day venture outside the station to help spacewalkers make repairs or additions to the station or perform scientifi c work. R2, as the robot is called, was unpacked in April and powered up for the first time in August. Though it is currently being tested inside the Destiny laboratory, over time both its territory and its applications could expand. Initial tasks identified for R2 include velocity air measurements and handrail cleaning, both of which are simple but necessary tasks that require a great deal of crew time. R2 also has a taskboard on which to practice flipping switches and pushing buttons. Over time, the robot should graduate to more complex tasks. There are no plans to return R2 to Earth. History Work on the first Robonaut began in 1997. The idea was to build a humanoid robot that could assist astronauts on tasks in which another pair of hands would be helpful or to venture forth to perform jobs either too dangerous for crew members to risk or too mundane for them to spend time on. -

Talk with a Robot
Talk With A Robot With its small, portable, travel size, kids and adults will love to bring it around to play with. Type a custom snippet or try one of the examples. Though, it was an improvement over the depressing white/black, its charm wore out pretty quickly. © 2014 Steve Worswick. “When the robot was active, people tended to respond and give feedback to whatever the robot was doing, saying ‘Wow!’, ‘Good job. Python 100. Typically, a chat bot communicates with a real person, but applications are being developed in which two chat bots can communicate with each other. We started with some of the key features. Human Robot Intelligent That Can Talk Dance Sing Watch Home Smart Humanoid Robot For Kids Education , Find Complete Details about Human Robot Intelligent That Can Talk Dance Sing Watch Home Smart Humanoid Robot For Kids Education,Human Robot Intelligent,Human Robots,Robots That Can Talk from Toy Robots Supplier or Manufacturer-Shenzhen Yuanhexuan Industrial Co. Another communication method I want to talk about is XMLRPC, which stands for XML-formatted Remote Procedure Call. The bots have hammers attached to micro servos that they use to hit targets on the other robot. Two human look-a-like robots invented by Japanese engineers. Unemployment. The site Cleverbot. Choose a material for your robot. Typically, a chat bot communicates with a real person, but applications are being developed in which two chat bots can communicate with each other. Slideshow ( 2 images ). Type a custom snippet or try one of the examples. In this week’s Tech Talk podcast: Brian Stelter discusses recent hacks on major Web sites and the author of a new book on robots discusses what is to come. -

Italia Milano Roma Mondo Speciale Tefaf Berlino Londra New York Parigi Vienna SUPPLEMENTO DI «IL GIORNALE DELL’ARTE» N
A cura di Franco Fanelli Questo mese (Arte contemporanea e Gallerie) 146 mostre Anna Maria Farinato (Arte antica) in 72 città Laura Giuliani (Archeologia) Walter Guadagnini (Fotografia) di 15 Paesi «IL GIORNALE DELL’ARTE» | MARZO 2020 IL GIORNALE DELLE MOSTRE Italia Milano Roma Mondo Speciale Tefaf Berlino Londra New York Parigi Vienna SUPPLEMENTO DI «IL GIORNALE DELL’ARTE» N. 406 MARZO 2020 / SOCIETÀ EDITRICE ALLEMANDI N. 406 MARZO 2020 / SOCIETÀ SUPPLEMENTO DI «IL GIORNALE DELL’ARTE» Un fotogramma del video «Nova» (2019) di Cao Fei. Cortesia (2019) di Cao Fei. Un fotogramma del video «Nova» dell’artista e di Vitamin Creative Space e Sprüth Magers. Dal 4 marzo al 17 maggio l’artista progetto espositivo per le Serpentine cinese presenta un nuovo Galleries di Londra. BOLOGNA GRESSONEY-SAINT-JEAN PISTOIA VENARIA REALE IL GIORNALE DELLE MOSTRE ITALIA Bologna Tutti insieme a casa Ricomposto il Polittico Griffoni, perla del Quattrocento emiliano «Santa Lucia» di Francesco del Cossa, Washington, Bologna. La riscoperta di un capola- National Gallery of Art. voro è la realizzazione di un evento In alto, Cecilia Cavalca che resterà probabilmente irripetibi- e Mauro Natale «Nudo femminile di schiena» (1735 ca) di Pierre Subleyras e, sotto, il logo della mostra le. Nell’epico racconto di un «ritorno a casa», nel mistico ritrovarsi di quel Così, in una mostra vo- Venaria gruppo di santi eleganti e solenni, una lutamente concentrata squadra di campioni spirituali «ricon- e filologica, dove a in- vocata» dopo quasi 300 anni, c’è, infat- cantare è, come sempre ti, il sapore dell’impresa memorabile. dovrebbe essere, la rara Tra Barocco e C’è, insomma, aria di festa, a Bologna, qualità degli originali, nell’accogliere questa mostra, «La ri- l’unica concessione alla Neoclassicismo scoperta di un capolavoro. -

Robonaut 2 – Operations on the International Space Station
Robonaut 2 – Operations on the International Space Station Ron Diftler Robonaut Project Lead Software, Robotics and Simulation Division NASA/Johnson Space Center [email protected] 2/14/2013 Overview Robonaut Motivation GM Relationship Robonaut Evolution Robonaut 2 (R2) Capabilities Preparing for ISS Journey to Space On Board ISS Future Activities Spinoffs Robonaut Motivation Capable Tool for Crew • Before, during and after activities Share EVA Tools and Workspaces. • Human Like Design Increase IVA and EVA Efficiency • Worksite Setup/Tear Down • Robotic Assistant • Contingency Roles Surface Operations • Near Earth Objects • Moon/Mars Interplanetary Vehicles Astronaut Nancy Currie works with 2 Robonauts to build a truss structure during an Telescopes experiment. Robonaut Development History 1998 • Subsystem Development • Testing of hand mechanism ROBONAUT 1999 Fall 1998 • Single Arm Integration • Testing with teleoperator ROBONAUT 2000 Fall 1999 • Dual Arm Integration • Testing with dual arm control ROBONAUT 2001 Fall 2000 • Waist and Vision Integration • Testing under autonomous control 2002 ROBONAUT • R1A Testing of Autonomous Learning Fall 2001 • R1B Integration 2003 ROBONAUT • R1A Testing Multi Agent EVA Team Fall 2002 • R1B Segwanaut Integration 2004 ROBONAUT Fall 2003 • R1A Autonomous Manipulation • R1B 0g Airbearing Development 2005 ROBONAUT Fall 2004 • DTO Flight Audit • Begin Development of R1C ROBONAUT 2006 Fall 2006 • Centaur base • Coordinated field demonstration GM’s Motivation Why did GM originally come to us? • World -

Design and Control of a Large Modular Robot Hexapod
Design and Control of a Large Modular Robot Hexapod Matt Martone CMU-RI-TR-19-79 November 22, 2019 The Robotics Institute School of Computer Science Carnegie Mellon University Pittsburgh, PA Thesis Committee: Howie Choset, chair Matt Travers Aaron Johnson Julian Whitman Submitted in partial fulfillment of the requirements for the degree of Master of Science in Robotics. Copyright © 2019 Matt Martone. All rights reserved. To all my mentors: past and future iv Abstract Legged robotic systems have made great strides in recent years, but unlike wheeled robots, limbed locomotion does not scale well. Long legs demand huge torques, driving up actuator size and onboard battery mass. This relationship results in massive structures that lack the safety, portabil- ity, and controllability of their smaller limbed counterparts. Innovative transmission design paired with unconventional controller paradigms are the keys to breaking this trend. The Titan 6 project endeavors to build a set of self-sufficient modular joints unified by a novel control architecture to create a spiderlike robot with two-meter legs that is robust, field- repairable, and an order of magnitude lighter than similarly sized systems. This thesis explores how we transformed desired behaviors into a set of workable design constraints, discusses our prototypes in the context of the project and the field, describes how our controller leverages compliance to improve stability, and delves into the electromechanical designs for these modular actuators that enable Titan 6 to be both light and strong. v vi Acknowledgments This work was made possible by a huge group of people who taught and supported me throughout my graduate studies and my time at Carnegie Mellon as a whole. -

Interview with Mark Tilden (Photo Courtesy of Wowwee Ltd.) Wowwee Courtesy of (Photo
APPENDIX ■ ■ ■ Interview with Mark Tilden (Photo courtesy of WowWee Ltd.) WowWee courtesy of (Photo Figure A-1. Here’s Mark Tilden at the 2005 New York Toy Fair. I have used excerpts from this interview throughout the book where applicable, but I also wanted to print it in its entirety. Some things, like Mark’s wonderful commentary on Hong Kong cuisine and his off-the-cuff comments on everything and anything, just didn’t fit into the structure of The Robosapien Companion, but they will be of interest to anyone who is curious about or admires the man behind the robots. 291 292 APPENDIX ■ INTERVIEW WITH MARK TILDEN This interview was conducted on February 13, 2005, at Wolfgang’s Steakhouse in the Murray Hill neighborhood of midtown Manhattan, in New York City. I recorded it with an Olympus DM-10 voice recorder. The dining room at Wolfgang’s is known for its historic tiled ceilings designed by Raphael Guastavino. They are beautiful, but they are an acoustic night- mare! Fortunately, my trusty DM-10 was up to the task. I have edited this only very lightly, mainly breaks where we spoke to waiters and so on. Also note that during a portion of this interview, Mark is showing me a slideshow on a little portable LCD screen. Most of the pictures from the slideshow ended up in Chapter 3. But if during the interview he seems to be making a reference, chances are it is to something on the screen. Without further ado, here is the full text of the interview. -

The Design of "Living" Biomech Machines: How Low Can One Go?
The Design of "Living" Biomech Machines: How low can one go? VBUG 1.5 "WALKMAN" Single battery. 0.7Kg. metal/plastic construction. Unibody frame. 5 tactile, 2 visual sensors. Control Core: 8 transistor Nv. 4 tran. Nu, 22 tran. motor. Total: 32 transistors. Behaviors: - High speed walking convergence. - powerful enviro. adaptive abilities - strong, accurate phototaxis. - 3 gaits; stop, walk, dig. - backup/explore ability. Mark W. Tilden Physics Division, Los Alamos National Laboratory <[email protected]> 505/667-2902 July, 1997 "So... what you guys have done is find a way to get useful work out of non-linear dynamics?" - Dr. Bob Shelton, NASA. Abstract Following three years of study into experimental Nervous Net (Nv) control devices, various successes and several amusing failures have implied some general principles on the nature of capable control systems for autonomous machines and perhaps, we conjecture, even biological organisms. These systems are minimal, elegant, and, depending upon their implementation in a "creature" structure, astonishingly robust. Their only problem seems to be that as they are collections of non-linear asynchronous elements, only a very complex analysis can adequately extract and explain the emergent competency of their operation. On the other hand, this could imply a cheap, self-programing engineering technology for autonomous machines capable of performing unattended work for years at a time, on earth and in space. Discussion, background and examples are given. Introduction to Biomorphic Design A Biomorphic robot (from the Greek for "of a living form") is a self-contained mechanical device fashioned on the assumption that chaotic reaction, not predictive forward modeling, is appropriate and sufficient for sustained "survival" in unspecified and unstructured environments.