A Guide to Smartphone Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Designing with Sensors: Creating Adaptive Experiences Avi Itzkovitch UI/UX Designer @Xgmedia What Is Adaptive Design? Responsive Design Adaptive Design
@xgmedia #ParisWeb Designing with Sensors: Creating Adaptive Experiences Avi Itzkovitch UI/UX Designer @xgmedia What is Adaptive Design? Responsive Design Adaptive Design 2002 Minority Report 2007 Homing Device 2007 First iPhone 2007 2013 Examples? GARMIN Zumo 660 Day and Night Interface Google Now Public transit When you’re near a bus stop or a subway station, Google Now tells you what buses or trains are next. Next appointment Get a notification for when you should leave to your next appointment. Based on synced calendars and current location. Ubiquitous Computing Mark Weiser “The most profound technologies are those that disappear. They weave themselves into the fabric of everyday life until they are indistinguishable from it.” Nest, The Learning Thermostat TEMPERATURE SENSOR AMBIENT LIGHT SENSOR TEMPERATURE AND HUMIDITY SENSOR WI-FI ANTENNA RADIO - Connects with home Wi-Fi network NEAR-FIELD MOTION SENSOR FAR-FIELD MOTION SENSOR WHAT IS AN ADAPTIVE SENSOR? Accelerometer Accelerometer List of sensors http://en.wikipedia.org/wiki/List_of_sensors • Geophone • Electrochemical gas • Air flow meter • Accelerometer • Charge-coupled device • Hydrophone sensor • Anemometer • Auxanometer • Colorimeter • Lace Sensor a guitar • Electronic nose • Flow sensor • Capacitive displacement • Contact image sensor pickup • Electrolyte–insulator– • Gas meter sensor • Electro-optical sensor • Microphone semiconductor sensor • Mass flow sensor • Capacitive sensing • Flame detector • Seismometer • Fluorescent chloride • Water meter • Free fall sensor • Infra-red -
Wireless Accelerometer - G-Force Max & Avg
The Leader in Low-Cost, Remote Monitoring Solutions Wireless Accelerometer - G-Force Max & Avg General Description Monnit Sensor Core Specifications The RF Wireless Accelerometer is a digital, low power, • Wireless Range: 250 - 300 ft. (non line-of-sight / low profile, capacitive sensor that is able to measure indoors through walls, ceilings & floors) * acceleration on three axes. Four different • Communication: RF 900, 920, 868 and 433 MHz accelerometer types are available from Monnit. • Power: Replaceable batteries (optimized for long battery life - Line-power (AA version) and solar Free iMonnit basic online wireless (Industrial version) options available sensor monitoring and notification • Battery Life (at 1 hour heartbeat setting): ** system to configure sensors, view data AA battery > 4-8 years and set alerts via SMS text and email. Coin Cell > 2-3 years. Industrial > 4-8 years Principle of Operation * Actual range may vary depending on environment. ** Battery life is determined by sensor reporting Accelerometer samples at 800 Hz over a 10 second frequency and other variables. period, and reports the measured MAXIMUM value for each axis in g-force and the AVERAGE measured g-force on each axis over the same period, for all three axes. (Only available in the AA version.) This sensor reports in every 10 seconds with this data. Other sampling periods can be configured, down to one second and up to 10 minutes*. The data reported is useful for tracking periodic motion. Sensor data is displayed as max and average. Example: • Max X: 0.125 Max Y: 1.012 Max Z: 0.015 • Avg X: 0.110 Avg Y: 1.005 Avg Z: 0.007 * Customer cannot configure sampling period on their own. -

Measurement of the Earth Tides with a MEMS Gravimeter
1 Measurement of the Earth tides with a MEMS gravimeter ∗ y ∗ y ∗ ∗ ∗ 2 R. P. Middlemiss, A. Samarelli, D. J. Paul, J. Hough, S. Rowan and G. D. Hammond 3 The ability to measure tiny variations in the local gravitational acceleration allows { amongst 4 other applications { the detection of hidden hydrocarbon reserves, magma build-up before volcanic 5 eruptions, and subterranean tunnels. Several technologies are available that achieve the sensi- p 1 6 tivities required for such applications (tens of µGal= Hz): free-fall gravimeters , spring-based 2; 3 4 5 7 gravimeters , superconducting gravimeters , and atom interferometers . All of these devices can 6 8 observe the Earth Tides ; the elastic deformation of the Earth's crust as a result of tidal forces. 9 This is a universally predictable gravitational signal that requires both high sensitivity and high 10 stability over timescales of several days to measure. All present gravimeters, however, have limita- 11 tions of excessive cost (> $100 k) and high mass (>8 kg). We have built a microelectromechanical p 12 system (MEMS) gravimeter with a sensitivity of 40 µGal= Hz in a package size of only a few 13 cubic centimetres. We demonstrate the remarkable stability and sensitivity of our device with a 14 measurement of the Earth tides. Such a measurement has never been undertaken with a MEMS 15 device, and proves the long term stability of our instrument compared to any other MEMS device, 16 making it the first MEMS accelerometer to transition from seismometer to gravimeter. This heralds 17 a transformative step in MEMS accelerometer technology. -
A GUIDE to USING FETS for SENSOR APPLICATIONS by Ron Quan
Three Decades of Quality Through Innovation A GUIDE TO USING FETS FOR SENSOR APPLICATIONS By Ron Quan Linear Integrated Systems • 4042 Clipper Court • Fremont, CA 94538 • Tel: 510 490-9160 • Fax: 510 353-0261 • Email: [email protected] A GUIDE TO USING FETS FOR SENSOR APPLICATIONS many discrete FETs have input capacitances of less than 5 pF. Also, there are few low noise FET input op amps Linear Systems that have equivalent input noise voltages density of less provides a variety of FETs (Field Effect Transistors) than 4 nV/ 퐻푧. However, there are a number of suitable for use in low noise amplifier applications for discrete FETs rated at ≤ 2 nV/ 퐻푧 in terms of equivalent photo diodes, accelerometers, transducers, and other Input noise voltage density. types of sensors. For those op amps that are rated as low noise, normally In particular, low noise JFETs exhibit low input gate the input stages use bipolar transistors that generate currents that are desirable when working with high much greater noise currents at the input terminals than impedance devices at the input or with high value FETs. These noise currents flowing into high impedances feedback resistors (e.g., ≥1MΩ). Operational amplifiers form added (random) noise voltages that are often (op amps) with bipolar transistor input stages have much greater than the equivalent input noise. much higher input noise currents than FETs. One advantage of using discrete FETs is that an op amp In general, many op amps have a combination of higher that is not rated as low noise in terms of input current noise and input capacitance when compared to some can be converted into an amplifier with low input discrete FETs. -

Tate Report 08-09
Tate Report 08–09 Report Tate Tate Report 08–09 It is the Itexceptional is the exceptional generosity generosity and and If you wouldIf you like would to find like toout find more out about more about PublishedPublished 2009 by 2009 by vision ofvision individuals, of individuals, corporations, corporations, how youhow can youbecome can becomeinvolved involved and help and help order of orderthe Tate of the Trustees Tate Trustees by Tate by Tate numerousnumerous private foundationsprivate foundations support supportTate, please Tate, contact please contactus at: us at: Publishing,Publishing, a division a divisionof Tate Enterprisesof Tate Enterprises and public-sectorand public-sector bodies that bodies has that has Ltd, Millbank,Ltd, Millbank, London LondonSW1P 4RG SW1P 4RG helped Tatehelped to becomeTate to becomewhat it iswhat it is DevelopmentDevelopment Office Office www.tate.org.uk/publishingwww.tate.org.uk/publishing today andtoday enabled and enabled us to: us to: Tate Tate MillbankMillbank © Tate 2009© Tate 2009 Offer innovative,Offer innovative, landmark landmark exhibitions exhibitions London LondonSW1P 4RG SW1P 4RG ISBN 978ISBN 1 85437 978 1916 85437 0 916 0 and Collectionand Collection displays displays Tel 020 7887Tel 020 4900 7887 4900 A catalogue record for this book is Fax 020 Fax7887 020 8738 7887 8738 A catalogue record for this book is available from the British Library. DevelopDevelop imaginative imaginative education education and and available from the British Library. interpretationinterpretation programmes programmes AmericanAmerican Patrons Patronsof Tate of Tate Every effortEvery has effort been has made been to made locate to the locate the 520 West520 27 West Street 27 Unit Street 404 Unit 404 copyrightcopyright owners ownersof images of includedimages included in in StrengthenStrengthen and extend and theextend range the of range our of our New York,New NY York, 10001 NY 10001 this reportthis and report to meet and totheir meet requirements. -

2014 BT Compatibility List 20141030
Item Brand Name Model 1 Acer Acer beTouch E210 2 Acer acer E400 3 Acer acer P400 4 Acer DX650 5 Acer E200 6 Acer Liquid E 7 Acer Liquid Mini (E310) 8 Acer M900 9 Acer S110 10 Acer Smart handheld 11 Acer Smart handheld 12 Acer Smart handheld E100 13 Acer Smart handheld E101 14 Adec & Partner AG AG vegas 15 Alcatel Alcatel OneTouch Fierce 2 16 Alcatel MISS SIXTY MSX10 17 Alcatel OT-800/ OT-800A 18 Alcatel OT-802/ OT-802A 19 Alcatel OT-806/ OT-806A/ OT-806D/ OT-807/ OT-807A/ OT-807D 20 Alcatel OT-808/ OT-808A 21 Alcatel OT-880/ OT-880A 22 Alcatel OT-980/ OT-980A 23 Altek Altek A14 24 Amazon Amazon Fire Phone 25 Amgoo Telecom Co LTD AM83 26 Apple Apple iPhone 4S 27 Apple Apple iPhone 5 28 Apple Apple iPhone 6 29 Apple Apple iPhone 6 Plus 30 Apple iPhone 2G 31 Apple iPhone 3G 32 Apple iPhone 3Gs 33 Apple iPhone 4 34 Apple iPhone 5C 35 Apple iPHone 5S 36 Aramasmobile.com ZX021 37 Ascom Sweden AB 3749 38 Asustek 1000846 39 Asustek A10 40 Asustek G60 41 Asustek Galaxy3_L and Galaxy3_S 42 Asustek Garmin-ASUS M10E 43 Asustek P320 44 Asustek P565c 45 BlackBerry BlackBerry Passport 46 BlackBerry BlackBerry Q10 47 Broadcom Corporation BTL-A 48 Casio Hitachi C721 49 Cellnet 7 Inc. DG-805 Cellon Communications 50 C2052, Technology(Shenzhen) Co., Ltd. Cellon Communications 51 C2053, Technology(Shenzhen) Co., Ltd. Cellon Communications 52 C3031 Technology(Shenzhen) Co., Ltd. Cellon Communications 53 C5030, Technology(Shenzhen) Co., Ltd. -

FOR 274: Forest Measurements and Inventory an Introduction to Surveying
FOR 274: Forest Measurements and Inventory Lecture 5: Principals of Surveying • An Introduction to Surveying • Horizontal Distances & Angles An Introduction to Surveying: Social and Land In Natural Resources we survey populations to gain representative information about something We also conduct land surveys to record the fine-scale topographic detail of an area We use both kinds of surveying in Natural Resources An Introduction to Surveying: Why do we Survey? To measure in the field the distance, bearing, and location of features on the Earth’s surface Geodetic Surveying • Very large distances • Have to account for curvature of the Earth! Plane Surveying • What we do • Thankfully regular trig works just fine 1 An Introduction to Surveying: Why do we Survey? Foresters as a rule do not conduct many new surveys BUT it is very common to: • Retrace old lines • Locate boundaries • Run cruise lines and transects • Analyze post treatments impacts on stream morphology, soils fuels,etc In addition to land survey equipment, Modern tools include the use of GIS and GPS Æ FOR 375 for more details An Introduction to Surveying: Types of Survey Construction Surveys: collect data essential for planning of new projects - constructing a new forest road - putting in a culvert Hydrological Surveys: collect data on stream channel morphology or impacts of treatments on erosion potential An Introduction to Surveying: Types of Survey Topographic Surveys: gather data on natural and man-made features on the Earth's surface to produce a 3D topographic map Typical -
Bringing the Future Faster
6mm hinge Bringing the future faster. Annual Report 2019 WorldReginfo - 7329578e-d26a-4187-bd38-e4ce747199c1 Bringing the future faster Spark New Zealand Annual Report 2019 Bringing the future faster Contents Build customer intimacy We need to understand BRINGING THE FUTURE FASTER and anticipate the needs of New Zealanders, and Spark performance snapshot 4 technology enables us Chair and CEO review 6 to apply these insights Our purpose and strategy 10 to every interaction, Our performance 12 helping us serve our Our customers 14 customers better. Our products and technology 18 Read more pages 7 and 14. Our people 20 Our environmental impact 22 Our community involvement 24 Our Board 26 Our Leadership Squad 30 Our governance and risk management 32 Our suppliers 33 Leadership and Board remuneration 34 FINANCIAL STATEMENTS Financial statements 38 Notes to the financial statements 44 Independent auditor’s report 90 OTHER INFORMATION Corporate governance disclosures 95 Managing risk framework roles and 106 responsibilities Materiality assessment 107 Stakeholder engagement 108 Global Reporting Initiative (GRI) content 109 index Glossary 112 Contact details 113 This report is dated 21 August 2019 and is signed on behalf of the Board of Spark New Zealand Limited by Justine Smyth, Chair and Charles Sitch, Chair, Audit and Risk Management Committee. Justine Smyth Key Dates Annual Meeting 7 November 2019 Chair FY20 half-year results announcement 19 February 2020 FY20 year-end results announcement 26 August 2020 Charles Sitch Chair Audit and Risk Management Committee WorldReginfo - 7329578e-d26a-4187-bd38-e4ce747199c1 Create New Zealand’s premier sports streaming business Spark Sport is revolutionising how New Zealanders watch their favourite sports events. -
Surveying and Drawing Instruments
SURVEYING AND DRAWING INSTRUMENTS MAY \?\ 10 1917 , -;>. 1, :rks, \ C. F. CASELLA & Co., Ltd II to 15, Rochester Row, London, S.W. Telegrams: "ESCUTCHEON. LONDON." Telephone : Westminster 5599. 1911. List No. 330. RECENT AWARDS Franco-British Exhibition, London, 1908 GRAND PRIZE AND DIPLOMA OF HONOUR. Japan-British Exhibition, London, 1910 DIPLOMA. Engineering Exhibition, Allahabad, 1910 GOLD MEDAL. SURVEYING AND DRAWING INSTRUMENTS - . V &*>%$> ^ .f C. F. CASELLA & Co., Ltd MAKERS OF SURVEYING, METEOROLOGICAL & OTHER SCIENTIFIC INSTRUMENTS TO The Admiralty, Ordnance, Office of Works and other Home Departments, and to the Indian, Canadian and all Foreign Governments. II to 15, Rochester Row, Victoria Street, London, S.W. 1911 Established 1810. LIST No. 330. This List cancels previous issues and is subject to alteration with out notice. The prices are for delivery in London, packing extra. New customers are requested to send remittance with order or to furnish the usual references. C. F. CAS ELL A & CO., LTD. Y-THEODOLITES (1) 3-inch Y-Theodolite, divided on silver, with verniers to i minute with rack achromatic reading ; adjustment, telescope, erect and inverting eye-pieces, tangent screw and clamp adjustments, compass, cross levels, three screws and locking plate or parallel plates, etc., etc., in mahogany case, with tripod stand, complete 19 10 Weight of instrument, case and stand, about 14 Ibs. (6-4 kilos). (2) 4-inch Do., with all improvements, as above, to i minute... 22 (3) 5-inch Do., ... 24 (4) 6-inch Do., 20 seconds 27 (6 inch, to 10 seconds, 403. extra.) Larger sizes and special patterns made to order. -

MICHIGAN STATE COLLEGE Paul W
A STUDY OF RECENT DEVELOPMENTS AND INVENTIONS IN ENGINEERING INSTRUMENTS Thai: for III. Dean. of I. S. MICHIGAN STATE COLLEGE Paul W. Hoynigor I948 This]: _ C./ SUPP! '3' Nagy NIH: LJWIHL WA KOF BOOK A STUDY OF RECENT DEVELOPMENTS AND INVENTIONS IN ENGINEERING’INSIRUMENTS A Thesis Submitted to The Faculty of MICHIGAN‘STATE COLLEGE OF AGRICULTURE AND.APPLIED SCIENCE by Paul W. Heyniger Candidate for the Degree of Batchelor of Science June 1948 \. HE-UI: PREFACE This Thesis is submitted to the faculty of Michigan State College as one of the requirements for a B. S. De- gree in Civil Engineering.' At this time,I Iish to express my appreciation to c. M. Cade, Professor of Civil Engineering at Michigan State Collegeafor his assistance throughout the course and to the manufacturers,vhose products are represented, for their help by freely giving of the data used in this paper. In preparing the laterial used in this thesis, it was the authors at: to point out new develop-ants on existing instruments and recent inventions or engineer- ing equipment used principally by the Civil Engineer. 20 6052 TAEEE OF CONTENTS Chapter One Page Introduction B. Drafting Equipment ----------------------- 13 Chapter Two Telescopic Inprovenents A. Glass Reticles .......................... -32 B. Coated Lenses .......................... --J.B Chapter three The Tilting Level- ............................ -33 Chapter rear The First One-Second.Anerican Optical 28 “00d011 ‘6- -------------------------- e- --------- Chapter rive Chapter Six The Latest Type Altineter ----- - ................ 5.5 TABLE OF CONTENTS , Chapter Seven Page The Most Recent Drafting Machine ........... -39.--- Chapter Eight Chapter Nine SmOnnB By Radar ....... - ------------------ In”.-- Chapter Ten Conclusion ------------ - ----- -. -
Interstate-Mcbee Engine Sensors As Engines Continue to Become More Complex, Sensors Have Become an Increasingly Crucial Component for Proper Performance
Serving the Diesel and Natural Gas Industry for over 70 years www.interstate-mcbee.com “Quality without Compromise” Interstate-McBee Engine Sensors As engines continue to become more complex, sensors have become an increasingly crucial component for proper performance. When operating properly, the sensors feed important data to the ECM (Engine Control Module), which regulates and constantly adjusts many of the basic engine functions. When not operating properly, they can send data that may cause the engine to operate at less than optimal efficiency. The four basic types of sensors are: 1. Position Sensor - Monitors crankshaft or camshaft for proper timing. 2. Pressure Sensor - Monitors the fuel system, turbo boost and ambient air. 3. Temperature Sensor - Monitors coolant, oil, or air temperature. Interstate-McBee has put each of these items through rigorous quality assurance and field 4. Combination Sensor - Monitors testing to ensure our customers the highest pressure and/or temperature. quality product. And, as always, every sensor purchased from Interstate-McBee comes with Contact an Interstate-McBee our comprehensive 2 year unlimited representative for more details. mileage/hours warranty. +++See reverse side for complete list of sensors offered+++ World Headquarters Florida California Texas 5300 Lakeside Ave. 9995 NW 58th St. 13137 Arctic Circle 1755 Transcentral Ct. Suite 200 Cleveland, OH. 44114 Doral, FL. 33178 Santa Fe Springs, CA. 90670 Houston, TX. 77032 PH: 216-881-0015 PH: 305-863-6650 PH: 562-356-5414 PH: 281-645-7168 Fax: -
Passmark Android Benchmark Charts - CPU Rating
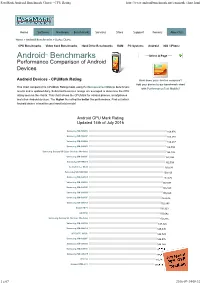
PassMark Android Benchmark Charts - CPU Rating http://www.androidbenchmark.net/cpumark_chart.html Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device Charts CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone Android TM Benchmarks ----Select A Page ---- Performance Comparison of Android Devices Android Devices - CPUMark Rating How does your device compare? Add your device to our benchmark chart This chart compares the CPUMark Rating made using PerformanceTest Mobile benchmark with PerformanceTest Mobile ! results and is updated daily. Submitted baselines ratings are averaged to determine the CPU rating seen on the charts. This chart shows the CPUMark for various phones, smartphones and other Android devices. The higher the rating the better the performance. Find out which Android device is best for your hand held needs! Android CPU Mark Rating Updated 14th of July 2016 Samsung SM-N920V 166,976 Samsung SM-N920P 166,588 Samsung SM-G890A 166,237 Samsung SM-G928V 164,894 Samsung Galaxy S6 Edge (Various Models) 164,146 Samsung SM-G930F 162,994 Samsung SM-N920T 162,504 Lemobile Le X620 159,530 Samsung SM-N920W8 159,160 Samsung SM-G930T 157,472 Samsung SM-G930V 157,097 Samsung SM-G935P 156,823 Samsung SM-G930A 155,820 Samsung SM-G935F 153,636 Samsung SM-G935T 152,845 Xiaomi MI 5 150,923 LG H850 150,642 Samsung Galaxy S6 (Various Models) 150,316 Samsung SM-G935A 147,826 Samsung SM-G891A 145,095 HTC HTC_M10h 144,729 Samsung SM-G928F 144,576 Samsung