A Complete Guide to Building Your Own Personalized
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lightweight Distros on Test
GROUP TEST LIGHTWEIGHT DISTROS LIGHTWEIGHT DISTROS GROUP TEST Mayank Sharma is on the lookout for distros tailor made to infuse life into his ageing computers. On Test Lightweight distros here has always been a some text editing, and watch some Linux Lite demand for lightweight videos. These users don’t need URL www.linuxliteos.com Talternatives both for the latest multi-core machines VERSION 2.0 individual apps and for complete loaded with several gigabytes of DESKTOP Xfce distributions. But the recent advent RAM or even a dedicated graphics Does the second version of the distro of feature-rich resource-hungry card. However, chances are their does enough to justify its title? software has reinvigorated efforts hardware isn’t supported by the to put those old, otherwise obsolete latest kernel, which keeps dropping WattOS machines to good use. support for older hardware that is URL www.planetwatt.com For a long time the primary no longer in vogue, such as dial-up VERSION R8 migrators to Linux were people modems. Back in 2012, support DESKTOP LXDE, Mate, Openbox who had fallen prey to the easily for the i386 chip was dropped from Has switching the base distro from exploitable nature of proprietary the kernel and some distros, like Ubuntu to Debian made any difference? operating systems. Of late though CentOS, have gone one step ahead we’re getting a whole new set of and dropped support for the 32-bit SparkyLinux users who come along with their architecture entirely. healthy and functional computers URL www.sparkylinux.org that just can’t power the newer VERSION 3.5 New life DESKTOP LXDE, Mate, Xfce and others release of Windows. -

0 A.D. the Battle for Wesnoth
GAMING ON LINUX GAMING ONLINUX The tastiest brain candy to relax those tired neurons LINUX FOR THE WIN! 0 A.D. Battle in real time strategy like an Egyptian. ike an overdue Christmas present the Lteam at Wildfire Games has released the fifteenth alpha version of the epic open-source real time strategy game 0 A.D. The latest alpha version Liam Dawes is the brains behind www.gamingonlinux.com, the home added some really essential of Linux gaming on the interweb. features that were previously missing, including a multi- A new army is inux has long been a viable player lobby, so it should now readying for battle! platform for gaming, but it is be a total cinch to find people only now that mainstream L to play online. gamers are starting to sit up and take notice. Despite what many people In addition to being easy to 0 A.D. aims to be of AAA this strategy has paid off. They may think, the thanks for this play online there is yet another production quality, which have run several successful shouldn’t solely go to Valve for using playable civilisation – the shows in abundance. It was crowdfunding, and are now Linux as the basis of its Steam OS: Ptolemaic Egyptians – with originally closed source, but the using it to fund programmers there’s a long history of gaming on unique units and gameplay team opened it up with the aim to make 0 A.D. even better! the Linux platform. Id Software was one of the first features included for them. -

Plugin Based Microbiome Analysis (PLUMA ) Version 2.0 - User Guide
Plugin Based Microbiome Analysis (PLUMA ) Version 2.0 - User Guide Trevor Cickovski and Giri Narasimhan Knight Foundation School of Computing and Information Sciences Florida International University USA tcickovs@fiu.edu, giri@fiu.edu http://biorg.cis.fiu.edu/pluma/ Other Contributors from Florida International University: Vanessa Aguiar-Pulido Guillermo Barquero Bhavyta Chauhan Mark Fajet Wenrui Huang Shamsed Mahmoud Veronica Parra Jingan Qu Joseph R. Quinn Juan Daniel Riveros Victoria Suarez-Ulloa Camilo Valdez August 31, 2021 Abstract We present PLUMA, a lightweight and flexible environment for constructing software pipelines. PLUMA is designed to be infinitely extensible, allowing users to select pipelines stages from a set of dynamically loaded plugins from the PLUMA plugin pool. Users around the world can contribute plugins in their lan- guage of choice to the plugin pool, that can then be used by others users to build pipelines through a uniform and opaqute interface that hides details of the underlying implementation. We begin by introducing the key features of PLUMA, and follow with a discussion of how to download and install the latest version, compile, and run the software. We also include information on setting up configuration files that specify desired plugins for a pipeline, and how to extend PLUMA with new plugins in various programming languages. We conclude with a full pipeline example and a brief discussion of our envisioned future of PLUMA. We distribute PLUMA under the MIT Software License, copyrighted by Florida International Univer- sity. Any professional work that uses PLUMA should provide the following citation: T. Cickovski and G. Narasimhan. Constructing lightweight and flexible pipelines using Plugin- Based Microbiome Analysis (PluMA). -
Updated Virtualrpc Components for RISC OS 6
ne of the main things that keeps me using my Risc PC is the versatility of the operating system - mainly due to it’s universal draw file format. For Oinstance I construct the centre pages in Artworks as this now has excellent PDF export facilities. However for proofing the magazine before it gets sent to the printers I like to do a printout to see if everything works properly. Because Artworks now can deal with multiple pages it is very easy to save each page either as an Artworks file or Draw file directly into the magazine’s Ovation Pro file by dragging and dropping. A two second job! Other computer platforms don’t generally have this facility of moving files directly into open application windows. Generally to move a file to another application you have to use the dreaded ‘save as’ filer window - choose a suitable format - navigate to where you need to save the file - save it - go to the other application - open a filer window - navigate to the saved file - open it in the new application. If you need to transfer a different file type you generally have to go through all that palaver again. Two seconds on RISC OS, thirty seconds on OS X or Windows. Draw is a great program with no real equivalent on a PC or Mac. For instance it can be put to good use in music for constructing objects the original program can’t do. I use the Sibelius music setting program on both RISC OS and Windows. The RISC OS still has one or two advantages over the PC version, one of which is it’s ability to export to Draw. -

Op E N So U R C E Yea R B O O K 2 0
OPEN SOURCE YEARBOOK 2016 ..... ........ .... ... .. .... .. .. ... .. OPENSOURCE.COM Opensource.com publishes stories about creating, adopting, and sharing open source solutions. Visit Opensource.com to learn more about how the open source way is improving technologies, education, business, government, health, law, entertainment, humanitarian efforts, and more. Submit a story idea: https://opensource.com/story Email us: [email protected] Chat with us in Freenode IRC: #opensource.com . OPEN SOURCE YEARBOOK 2016 . OPENSOURCE.COM 3 ...... ........ .. .. .. ... .... AUTOGRAPHS . ... .. .... .. .. ... .. ........ ...... ........ .. .. .. ... .... AUTOGRAPHS . ... .. .... .. .. ... .. ........ OPENSOURCE.COM...... ........ .. .. .. ... .... ........ WRITE FOR US ..... .. .. .. ... .... 7 big reasons to contribute to Opensource.com: Career benefits: “I probably would not have gotten my most recent job if it had not been for my articles on 1 Opensource.com.” Raise awareness: “The platform and publicity that is available through Opensource.com is extremely 2 valuable.” Grow your network: “I met a lot of interesting people after that, boosted my blog stats immediately, and 3 even got some business offers!” Contribute back to open source communities: “Writing for Opensource.com has allowed me to give 4 back to a community of users and developers from whom I have truly benefited for many years.” Receive free, professional editing services: “The team helps me, through feedback, on improving my 5 writing skills.” We’re loveable: “I love the Opensource.com team. I have known some of them for years and they are 6 good people.” 7 Writing for us is easy: “I couldn't have been more pleased with my writing experience.” Email us to learn more or to share your feedback about writing for us: https://opensource.com/story Visit our Participate page to more about joining in the Opensource.com community: https://opensource.com/participate Find our editorial team, moderators, authors, and readers on Freenode IRC at #opensource.com: https://opensource.com/irc . -

Gradle and Build Systems for C Language 28.4.2014 FI MUNI, Brno
Gradle and build systems for C language 28.4.2014 FI MUNI, Brno Juraj Michálek http://georgik.sinusgear.com Grab the source code https://github.com/georgik/fimuni-c-cpp-examples.git Who am I? SDL Gradle CMake Nuget tiobe.com - programming lang. index Let’s start with something cool The Battle for Wesnoth Multiplatform SDL officially supports Windows, Mac OS X, Linux, iOS, and Android. SDL versions 1.2 stable - rock solid 2.x development - new features Some basic concepts SDL_init(flags) SDL_INIT_TIMER - The timer subsystem SDL_INIT_AUDIO - The audio subsystem SDL_INIT_VIDEO - The video subsystem SDL_INIT_CDROM - The cdrom subsystem SDL_INIT_JOYSTICK - The joystick subsystem SDL_INIT_EVERYTHING - All of the above SDL_INIT_NOPARACHUTE - Prevents SDL from catching fatal signals SDL_INIT_EVENTTHREAD - Runs the event manager in a separate thread Quit application SDL_quit() Window SDL_CreateWindow("Hello World!", 100, 100, 640, 480, SDL_WINDOW_SHOWN); Load bitmap SDL_Surface *bmp = NULL; bmp = SDL_LoadBMP("./smajlik.bmp"); Visual data SDL_Renderer SDL_Texture Keyboard SDL_PollEvent(SDL_Event *event) event.key.keysym.sym Timer SDL_TimerID SDL_AddTimer( Uint32 interval, SDL_TimerCallback callback, void* param) Mouse SDL_GetMouseState(*x, *y); Text Not implemented Extensions extension for many languages: C++, Java, Lua, Perl, PHP, Python, Ruby Made with SDL Autiomation Evolved Domain Specific Language gradle tasks build.gradle gradle tasks gradle hello Plugin system ● focussed functionality is added by plugins ● reuse patterns and practices ● avoiding -
Free Software for Schools
FreeFree SoftwareSoftware forfor SchoolsSchools Open Source Victoria & The National Center for Open Source and Education 7.07 Open Source Victoria Page 2 of 77 The National Center for Open Source and Education Table of Contents Table of Contents...............................................................................................................................3 Why Consider Open Source Software...............................................................................................4 How to Use this Catalog....................................................................................................................5 Open Source Victoria ........................................................................................................................6 The National Center for Open Source and Education ......................................................................7 Additional Software...........................................................................................................................8 Three Paths of Open Source Software for Schools............................................................................9 Office Productivity Applications.....................................................................................................10 Graphics...........................................................................................................................................18 Publishing........................................................................................................................................23 -
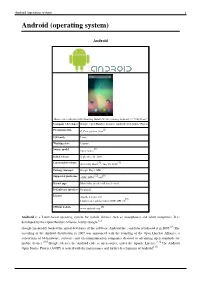
Android (Operating System) 1 Android (Operating System)
Android (operating system) 1 Android (operating system) Android Home screen displayed by Samsung Galaxy Nexus, running Android 4.1 "Jelly Bean" Company / developer Google, Open Handset Alliance, Android Open Source Project [1] Programmed in C, C++, python, Java OS family Linux Working state Current [2] Source model Open source Initial release September 20, 2008 [3] [4] Latest stable release 4.1.1 Jelly Bean / July 10, 2012 Package manager Google Play / APK [5] [6] Supported platforms ARM, MIPS, x86 Kernel type Monolithic (modified Linux kernel) Default user interface Graphical License Apache License 2.0 [7] Linux kernel patches under GNU GPL v2 [8] Official website www.android.com Android is a Linux-based operating system for mobile devices such as smartphones and tablet computers. It is developed by the Open Handset Alliance, led by Google.[2] Google financially backed the initial developer of the software, Android Inc., and later purchased it in 2005.[9] The unveiling of the Android distribution in 2007 was announced with the founding of the Open Handset Alliance, a consortium of 86 hardware, software, and telecommunication companies devoted to advancing open standards for mobile devices.[10] Google releases the Android code as open-source, under the Apache License.[11] The Android Open Source Project (AOSP) is tasked with the maintenance and further development of Android.[12] Android (operating system) 2 Android has a large community of developers writing applications ("apps") that extend the functionality of the devices. Developers write primarily in a customized version of Java.[13] Apps can be downloaded from third-party sites or through online stores such as Google Play (formerly Android Market), the app store run by Google. -

Revista Espirito Livre
ENTREVISTA John Diamond, riadordo Alien Arena http://revista.espiritolivre.org | #004 | Julho 2009 ENTREVISTA Smi KyöstilÄ, riadordo Fretson Fire PYTHON ENTREVISTA AnÁlise do livro Python par Bernhard Wymnn, Desenvolvedores desenvolvedordo TORCS GINGA Ginga brsileir na TV Intertiv APTITUDE Gereniando paotes PROMOÇÕES Sorteiosde kits, dse camisetas COMLICENÇA Revist EspÍrito Livre | Julho 2009 | http://revista.espiritolivre.org |02 EDITORIAL / EXPEDIENTE Jogos, diversÃo e EXPEDIENTE DiretorGerl muito mais... JoÃo Fernando Costa Júnior Editor Chegamos nesta quarta ediÇÃo em meio a muitos eventos, e JoÃo Fernando Costa Júnior ultrpassndo a barreir das100 pÁginas Como poderão ver, apesrdo tem Revisão de capa ser sobre jogos, os eventos permearm o mês de junho e a revista Mrelo Tonieto nÃo poderia deixá-losde for! Portanto, alertamosaosleitoresque um over- dose de informÇÃo osesper. Arte e DiagrmÇÃo Como tem de capa, Jogose Diversão, a Revista EspÍrito Livre teve a JoÃo Fernando Costa Júnior honr de ter omo entrevistados diversos responsáveis por projetos mundial- mente onheidose jÁ onsgrdospela omunidade. Aompanhamasentre- Capa vistas, mtÉrias que irundam este tem tÃo disutido, e Às vezes atÉ Nilton Pessnha inflamdo, afinal, muitosdosleitoresque nosestÃo lendo neste momento ain- da utilizmsoftwaresproprietÁriosafimde teremum plataform par seusjo- Contribuirmnesta ediÇÃo gos favoritos. Esta ediÇÃo tenta mostrr que É possível enontrr tÍtulos de Aéio Pires qualidade ontendo seu ódigo aberto, demonstrndo que a qualidade destes Alessndro Silv aumenta a cada dia, assimomo o nÚmero de jogose seusfÃs. Alexndre Oliv Andress Mrtins Asentrevistasdesta ediÇÃo, que são três, revelamumpouo missobre Bernhard Wymnn John Diamond - riador do Alien Arena, Bernhard Wymnn - lÍder da equipe CarlosDonizete responsável pelo TORCSe Smi KyöstilÄ, riadordo Fretson Fire. -
Best Practices to Prepare Your Amazon Workspaces Linux Images
Best Practices to Prepare your Amazon WorkSpaces for Linux Images Amazon WorkSpaces for Linux February 2020 Notices Customers are responsible for making their own independent assessment of the information in this document. This document: (a) is for informational purposes only, (b) represents current AWS product offerings and practices, which are subject to change without notice, and (c) does not create any commitments or assurances from AWS and its affiliates, suppliers or licensors. AWS products or services are provided “as is” without warranties, representations, or conditions of any kind, whether express or implied. The responsibilities and liabilities of AWS to its customers are controlled by AWS agreements, and this document is not part of, nor does it modify, any agreement between AWS and its customers. © 2020 Amazon Web Services, Inc. or its affiliates. All rights reserved. Contents Introduction .......................................................................................................................... 1 Well Architected Principles for Image Management .......................................................... 2 Amazon WorkSpaces Configuration ................................................................................... 4 Best Practices for Amazon WorkSpaces Images and Bundles ......................................... 5 Amazon Linux WorkSpace Image Design Options ......................................................... 6 Example WorkSpace Image and Bundle Tagging Structures ..................................... -

Linux Mint 18
Fresh Mint Hot on the heels of Ubuntu’s latest distro, Clement Lefebvre and his team have concocted their latest powerful and refreshing blend. Jonni Bidwell takes a sip of Mint 18. int’s motto, ‘From freedom to use. Now it has risen through the rankings features its own desktop, core applications came elegance’, speaks to an to become one of the most popular Linux and support channels. Along the way there entirely different class of distros out there. have been hiccups and detours, but the Mdistribution project continues to innovate (distro): one that isn’t “Mint has risen through the and show that it can stand up shackled by commercial well alongside the major interest and one that actually rankings to become one of the players that have deeper wants to be pleasurable for pockets. Using Ubuntu 16.04 desktop users. most popular Linux distros.” as a base, the latest iteration Linux Mint was born 10 years ago out of Linux Mint has definitely become in the Mint family, Sarah, will be supported lead developer Clement Lefebvre’s desire to something much bigger than its first until 2021. And who knows what desktop build a distro that was both powerful and easy nickname ‘Ubuntu with codecs’. It now Linux will look like by then. 32 LXF214 Summer 2016 Cinnamon 3 desktop One of the most anticipated features of Mint 18 is Cinnamon 3.0. Let’s see what it means to be a modern traditional desktop. innamon is Mint’s unique and admired desktop As in environment and rebels against hyper-modern previous Cdesktops, such as Unity and Gnome 3. -

Ubuntu Mate 14.10
GrundlaGen Distributionen auf DVD Ubuntu Mate 14.10 Das neue Ubuntu 14.10 Mate ist noch nicht mal eine offizielle Variante und stiehlt den anderen Versionen jetzt schon die Show – zumindest aus der Sicht vieler Anwender, die einen klassischen Desktop bevorzugen. Von David Wolski Während sich Ubuntu 14.10 und seine Varianten mit Neuerungen zurückhalten, ist auf einem Neben- schauplatz mehr los: Mit Ubuntu Mate (auf Heft-DVD) gibt zur Versi- on 14.10 ein neues Ubuntu-Derivat mit dem Mate-Desktop sein Debüt. Die Distribution, die schon bald in den Kreis der offiziellen Varianten aufge- nommen werden soll, ist ein Wiederse- hen mit einem alten Bekannten. Denn der hier verwendete Mate-Desktop fußt auf jenen bewährten Bedienkon- zepten, die auch den Ubuntu-Versionen 4.10 bis 10.10 mit Gnome 2 zu ihrem klemmte sich das Mint-Team anfangs veränderten Bibliotheken der Gnome Erfolg verholfen haben. hinter die Entwicklung und half tat- Foundation, und das bedeutet weniger kräftig mit, so dass Mate ab Version Aufwand in der Pflege. Die inzwischen Mate macht alten Gnome- 1.2 als erfolgreicher Fork mit viel Ei- saubere Trennung von eigenen und Desktop munter gendynamik auf eigenen Beinen stehen übernommenen Komponenten heißt Mate ist eine eigenständige Desktop- konnte. Als klassischer Desktop im auch, dass Mate ohne Versionskon- Umgebung mit kleinem Entwickler- Look von Gnome 2 füllt Mate eine Lü- flikte mit Gnome 3 koexistieren kann. Team, das Gnome 2 zu schade für das cke, die Gnome 3 mit seinem jäh geän- Diesem Umstand ist es zu verdanken, Abstellgleis fand und den Desktop seit derten Bedienkonzept zunächst offen- dass Mate 1.8.1 in die offiziellen Pa- 2011 als Abspaltung (Fork) weiter- ließ und erst kürzlich mit dem ketquellen von Ubuntu 14.10 aufge- pflegt.