Computation of Flows Around the Transom Stern Hull by the Modified Rankine Source Panel Method 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Hull Identification Numbers
The National Association of State Boating Law Administrators Hull Identification Number Training Icons Lesson Plan Instructor Notes Total session time: 30 minutes I) Introduction Slide 1 (Title Slide) 1) Instructor’s background 2) Make up of classroom participants Officers vs. non-officers. Ask how many years officers have done watercraft enforcement Transition II) What is a Hull Identification Number Slide 2 1) 12 character identifier (1) Equate to a vehicle 2) Required by USCG after identification Number. st November 1 1972 (2) Prior to Nov. 1st 1972 3) Required Secondary/hidden HIN serial numbers of varying required after 1984 lengths of characters may 4) Three HIN formats: be found on watercraft a) Straight Year (3) Only available to Law b) Model Year Enforcement c) New/Current Format Transition Slide 3 MIC is first three III) What can a HIN tell you? characters and is assigned 1) Manufacturer Identification Code by US Coast Guard 2) Production or Serial Number (b) Serial Number (SN) is 3) Month of Production characters 4-8 4) Year of Production (b) SN is English 5) Model Year alphabet letters or Arabic numerals (b) SN can not contain letters I, O, and Q Transition Hull Identification Number Training Icons Lesson Plan Instructor Notes IV) Display of HIN Slide 4 1) Starboard outboard side of transom a) within 2 in. of top of transom, (2) addresses locations of gunwale, or hull/deck joint HINs on PWC’s 2) W/C without a transom What is aft? Toward the starboard outboard side of hull stern/back of the a) within one foot of stern watercraft b) within 2 in. -
Technical Reference for Garmin NMEA 2000 Products Iii Table of Contents
Technical Reference for Garmin® NMEA 2000® Products + - All rights reserved. Except as expressly provided herein, no part of this manual may be reproduced, copied, transmitted, disseminated, downloaded or stored in any storage medium, for any purpose without the express prior written consent of Garmin. Garmin hereby grants permission to download a single copy of this manual onto a hard drive or other electronic storage medium to be viewed and to print one copy of this manual or of any revision hereto, provided that such electronic or printed copy of this manual must contain the complete text of this copyright notice and provided further that any unauthorized commercial distribution of this manual or any revision hereto is strictly prohibited. Information in this document is subject to change without notice. Garmin reserves the right to change or improve its products and to make changes in the content without obligation to notify any person or organization of such changes or improvements. Visit the Garmin Web site (www.garmin.com) for current updates and supplemental information concerning the use and operation of this and other Garmin products. Garmin®, the Garmin logo, and GPSMAP® are trademarks of Garmin Ltd. or its subsidiaries, registered in the USA and other countries. GFS™, GWS™, GHP™, GXM™, GFL™, GBT™, GST™, GMI™, GRA™, GET™, GHC™, Intelliducer™, are trademarks of Garmin Ltd. or its subsidiaries. These trademarks may not be used without the express permission of Garmin. NMEA 2000® and the NMEA 2000 logo are registered trademarks of the National Maritime Electronics Association. Introduction Introduction A NMEA 2000 network consists of connected NMEA 2000 devices that communicate using basic plug-and-play functionality. -

Boat Compendium for Aquatic Nuisance Species (ANS) Inspectors
COLORADO PARKS & WILDLIFE Boat Compendium for Aquatic Nuisance Species (ANS) Inspectors COLORADO PARKS & WILDLIFE • 6060 Broadway • Denver, CO 80216 (303) 291-7295 • (303) 297-1192 • www.parks.state.co.us • www.wildlife.state.co.us The purpose of this compendium is to provide guidance to certified boat inspectors and decontaminators on various watercraft often used for recreational boating in Colorado. This book is not inclusive of all boats that inspectors may encounter, but provides detailed information for the majority of watercraft brands and different boat types. Included are the make and models along with the general anatomy of the watercraft, to ensure a successful inspection and/or decontamination to prevent the spread of harmful aquatic nuisance species (ANS). Note: We do not endorse any products or brands pictured or mentioned in this manual. Cover Photo Contest Winner: Cindi Frank, Colorado Parks and Wildlife Crew Leader Granby Reservoir, Shadow Mountain Reservoir and Grand Lake Cover Photo Contest 2nd Place Winner (Photo on Back Cover): Douglas McMillin, BDM Photography Aspen Yacht Club at Ruedi Reservoir Table of Contents Boat Terminology . 2 Marine Propulsion Systems . 6 Alumacraft . 10 Bayliner . 12 Chris-Craft . 15 Fisher . 16 Four Winns . 17 Glastron . 18 Grenada Ballast Tank Sailboats . 19 Hobie Cat . 20 Jetcraft . 21 Kenner . 22 Lund . 23 MacGregor Sailboats . 26 Malibu . 27 MasterCraft . 28 Maxum . 30 Pontoon . 32 Personal Watercraft (PWC) . 34 Ranger . 35 Tracker . 36 Trophy Sportfishing . 37 Wakeboard Ballast Tanks and Bags . 39 Acknowledgements . Inside back cover Boat Compendium for Aquatic Nuisance Species (ANS) Inspectors 1 Boat Terminology aft—In naval terminology, means towards the stern (rear) bow—A nautical term that refers to the forward part of of the boat. -

Aftermarket Catalog - 2019 We Have Moved - 75 North Frontage Road, Suite 106, North Stonington, CT 06359
Aftermarket Catalog - 2019 We Have Moved - 75 North Frontage Road, Suite 106, North Stonington, CT 06359 Rugged • Reliable • Innovative Faria Beede Instruments, Inc. has been manufacturing gauges and instruments in Connecticut for more than 60 years. The company offers analog and digital engine monitoring and telematics solutions for a wide range of global marine, military, industrial and performance industries. With the recent expansion into the Indiana facilities we have doubled our manufacturing capabilities and improved our state of the art electronic board building capabilities, this change makes Faria Beede digital instruments even more Instruments for reliable than ever before. One of the few remaining vertically integrated U.S. manufacturers of SAE J1939 Automotive instrumentation, Faria Beede provides some of the best turnaround times and Commercial responsive support in the industry. This is only possible by having total control of all aspects of design, engineering and manufacturing. Industrial This year we are moving our facilities to North Stonington, CT. This new building Performance offers better control of our manufacturing processes that our current 200 year old building could not. We are all excited for this move and look forward to the Recreational changes this move will bring. Marine Whether your needs are simple or for the more advanced computerized engines, Faria Beede has the instrumentation solution that is right for you. Military www.FariaBeede.com Made in the USA Featured Boxed Sets GPS Speedometer Depth Sounders -
2020 Sailfish 270 WAC Specifications
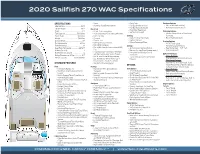
2020 Sailfish 270 WAC Specifications 07/30/201907/31/2018 SPECIFICATIONS • Mirror • Porta Potti Hardware Options LOA Hull Only ..................................26’ 2” • Stand-up Head Compartment • Pull Out Shower in Head • Ski Tow Bar (Retractable) • Mid-Ship Fender Cleats (2) Length Rigged ................................28’ 2” • Pull Out Transom Shower Electrical • Raw Water Washdown Beam ................................................9’ 0” • 12 Volt DC Accessory Plug • Self Bailing Cockpit Plumbing Options Fuel Capacity .........................188 Gallons • Accessory Switch Panel w/Circuit Breakers • Electric Marine Head w/ Overboard Fresh Water .............................14 Gallons • Cabin Lighting Seating Discharge Weight .....................................7,400 lbs. • Compass • Captain’s Chair Foot Rests • Motor Flushing System Cockpit Depth .................................... 30” • Electric Horn • Captain’s Chairs • Deluxe Passenger Chair Seating Options Max Horsepower .......................... 400 hp • Full Digital Instrumentation • 40” Aft Folding Seat Draft (Hull Only) ...................................18” • Fully NEMA Compliant Storage • Port Side Lounge Seating Dead Rise (Multiangle) .................22°-24° • Fusion/Wet Sounds Stereo System & USB • Anchor Locker (w/ Bow Roller) • Rear Cooler Seat - 75 Qt. Yeti Battery Capacity ................................... 3 Port • Battery Storage (Bilge Compartment) • Rear Jump Seats • Heavy Duty High Performance Trim Tabs Rod Holders (Standard) ........................14 -

LEXIQUE NAUTIQUE ANGLAIS-FRANÇAIS – 2E ÉDITION, NUMÉRIQUE, ÉVOLUTIVE, GRATUITE
Aa LEXIQUE NAUTIQUE ANGLAIS-FRANÇAIS – 2e ÉDITION, NUMÉRIQUE, ÉVOLUTIVE, GRATUITE « DIX MILLE TERMES POUR NAVIGUER EN FRANÇAIS » ■ Dernière mise à jour le 19 octobre 2017 ■ Présenté sur MS Word 2011 pour Mac ■ Taille du fichier 2,3 Mo – Pages : 584 - Notes de bas de page : 51 ■ Ordre de présentation : alphabétique anglais ■ La lecture en mode Page sur deux colonnes est recommandée Mode d’emploi: Cliquer [Ctrl-F] sur PC ou [Cmd-F] sur Mac pour trouver toutes les occurrences d’un terme ou expression en anglais ou en français AVERTISSEMENT AUX LECTEURS Ouvrage destiné aux plaisanciers qui souhaitent naviguer en français chez eux comme à l’étranger, aux instructeurs, modélistes navals et d’arsenal, constructeurs amateurs, traducteurs en herbe, journalistes et adeptes de sports nautiques et lecteurs de revues spécialisées. Il subsiste moult coquilles, doublons et lacunes dont l’auteur s’excuse à l’avance. Des miliers d’ajouts et corrections ont été apportés depuis les années 80 et les entrées sont dorénavant accompagnées d’un ou plusieurs domaines. L’auteur autodidacte n’a pas fait réviser l’ouvrage entier par un traducteur professionnel mais l’apport de généreux plaisanciers, qui ont fait parvenir corrections et suggestions depuis plus de trois décennies contribue à cet ouvrage offert gracieusement dans un but strictement non lucratif, pour usage personnel et libre partage en ligne avec les amoureux de la navigation et de la langue française. Les clubs et écoles de voile sont encouragés à s’en servir, à le diffuser aux membres et aux étudiants. Tous droits réservés de propriété intellectuelle de l’ouvrage dans son ensemble (Copyright 28.10.1980 Ottawa); toutefois la citation de courts extraits est autorisée et encouragée. -

2021 Standards & Options
2021 STANDARDS & OPTIONS 34 LX STANDARD EQUIPMENT SPECIFICATIONS HARDTOP FEATURES TRANSOM FEATURES • Molded Fiberglass Full Beam Hardtop with • One 316L SS Entry Transom Door L.O.A. with Integrated Platform ......................34' 9" Integrated Visor and Fiberglass Aft Supports • Integrated Transom Platform Extensions Beam .........................................................................11' 0" • Custom Windshield System with Tempered Outboard of Engines Curved Windshield, Center Opening Section, • 316L SS Grab Rails on Port and Starboard Tempered Side Glass and Fiberglass Frame Hull Draft (with Motors Up) ................................ 2' 2" Platform Extensions • Two Windshield Wipers with Washers Hull Draft (with Motors Down) .......................... 3' 1" • Telescopic Boarding Ladder Mounted in Port • Molded Overhead Electronic Mounting Platform Extension Approx. Dry Weight ...................................13,800 lbs. Surface • Top Mount Removable Telescopic Swimming • Folding LED Combination Anchor/All-Round Ladder on Starboard Platform Extension Maximum Horsepower Navigation Light Twin 400 Mercurys .......................................... 800 HP • Recessed Cold Water Transom Shower with • Sunroof, Manually Operated Pull Out Sprayer Clearance to Top of Hardtop • Two Red/White LED Lights • Molded Non-Skid Passage for Athwartship (from waterline) ...................................................... 8' 7" • Multicolor LED Dramatic Lighting with Access Gasoline Fuel Capacity ..................200 U.S. Gallons Shadow-Caster® -

H.M.S Victory 1805
H.M.S VICTORY 1805 Exact scale model of the 100-Gun British Ship of the Line. This, the fifth ship of the Royal Navy to bear the name Victory, had three major battle honours. The first being the Battle of Ushant 1781, the second, the Battle of St. Vincent 1797 and the third, for which she is most famed, the Battle of Trafalgar 1805. By the end of the Battle of Trafalgar, there was not a mast, spar, shroud or sail on board Victory that had not been severely damaged, lost or destroyed in the conflict. Manual 2 of 3 Masting & Rigging Additional photos of every stage of construction can be found on our website at: http://www.jotika-ltd.com Nelsons Navy Kits manufactured and distributed by JoTiKa Ltd. Model Marine Warehouse, Hadzor, Droitwich, WR9 7DS. Tel ~ +44 (0) 1905 776 073 Fax ~ +44 (0) 1905 776 712 Email ~ [email protected] Masts & Bowsprit You may find it easier to avoid turning the round dowel into an oval dowel when tapering by using a David plane, draw knife or similar as follows: 1. Slice the dowel (running with the grain), from a round at the start point of the taper to a square at the end of the taper. 2. Repeat this process so that the dowel runs from round at the start of the taper to an eight sided polygon at the end of the taper. 3. Repeat step two as desired so that the dowel runs from a round at the start of the taper to a 16 or 32 sided polygon at the end, of a diameter marginally more than that required. -

Nautical Terms for the Model Ship Builder
Nautical Terms For The Model Ship Builder Compliments of www.modelshipbuilder.com “Preserving the Art of Model Ship Building for a new Generation” January 2007 Nautical Terms For The Model Ship Builder Copyright, 2007 by modelshipbuidler.com Edition 1.0 All rights reserved under International Copyright Conventions “The purpose of this book is to help educate.” For this purpose only may you distribute this book freely as long as it remain whole and intact. Though we have tried our best to ensure that the contents of this book are error free, it is subject to the fallings of human frailty. If you note any errors, we would appreciate it if you contact us so they may be rectified. www.modelshipbuilder.com www.modelshipbuilder.com 2 Nautical Terms For The Model Ship Builder Contents A......................................................................................................................................................................4 B ......................................................................................................................................................................5 C....................................................................................................................................................................12 D....................................................................................................................................................................20 E ....................................................................................................................................................................23 -

1077 Subpart A—General
Coast Guard, DHS Pt. 183 § 181.701 Applicability. 183.5 Incorporation by reference. This subpart applies to all personal Subpart B—Display of Capacity flotation devices that are sold or of- Information fered for sale for use on recreational boats. 183.21 Applicability. 183.23 Capacity marking required. § 181.702 Information pamphlet: re- 183.25 Display of markings. quirement to furnish. 183.27 Construction of markings. (a) Each manufacturer of a personal Subpart C—Safe Loading flotation device (PFD) must furnish with each PFD that is sold or offered 183.31 Applicability. for sale for use on a recreational boat, 183.33 Maximum weight capacity: Inboard and inboard-outdrive boats. an information pamphlet meeting the 183.35 Maximum weight capacity: Outboard requirements of § 181.703, § 181.704, or boats. § 181.705 of this subpart, as appropriate. 183.37 Maximum weight capacity: Boats (b) No person may sell or offer for rated for manual propulsion and boats sale for use on a recreational boat, a rated for outboard motors of 2 horse- PFD unless an information pamphlet power or less. required by this section is attached in 183.39 Persons capacity: Inboard and in- such a way that it can be read prior to board-outdrive boats. purchase. 183.41 Persons capacity: Outboard boats. 183.43 Persons capacity: Boats rated for [CGD 93–055, 61 FR 13927, Mar. 28, 1996, as manual propulsion and boats rated for amended by USCG–2013–0263, 79 FR 56499, outboard motors of 2 horsepower or less. Sept. 22, 2014] Subpart D—Safe Powering § 181.703 Information pamphlet: Con- tents. -

Argonauta Vol 9 No 1
ARGONAUTA The Newsletter of The Canadian Nautical Research Society Volume IX Number One January 1992 ARGONAUTA Founded 1984 by Kenneth S. Mackenzie ISSN No. 0843-8544 EDITORS Lewis R. FISCHER Olaf U. JANZEN Gerald E. PANTING EDITORIAL ASSISTANT Margaret M. GULLIVER ARGONAUTA EDITORIAL OFFICE Maritime Studies Research Unit Memorial University of Newfoundland St. John's, Nfld. A1C 5S7 Telephones: (709) 737-8424/(709) 737-2602 FAX: (709) 737-4569 ARGONAUTA is published four times per year in January, April, July and October and is edited for the Canadian Nautical Research Society within the Maritime Studies Research Unit at Memorial University of Newfoundland. THE CANADIAN NAUTICAL RESEARCH SOCIETY Honourary President: Niels JANNASCH, Halifax Executive Officers Liaison Committee President: WA.B. DOUGLAS, Ottawa Chair: Fraser M. MCKEE, Markdale Past President: Barry M. GOUGH, Waterloo Atlantic: David FLEMMING, Halifax Vice-President: Eileen R. MARCIL, Charlesbourg Quebec: Eileen R. MARCIL, Charlesbourg Vice-President: Eric W. SAGER, Victoria Ontario: Maurice D. SMITH, Kingston Councillor: Garth S. WILSON, Ottawa Western: Christon I. ARCHER, Calgary Councillor: M. Stephen SALMON, Ottawa Pacific: John MACFARLANE, Victoria Councillor: Thomas BEASLEY, Vancouver Arctic: Kenneth COATES, Victoria Councillor: Fraser M. MCKEE, Markdale Secretary: Lewis R. FISCHER, St. John's CNRS MAILING ADDRESS Treasurer: G. Edward REED, Ottawa Assistant Treasurer: Faye KERT, Ottawa P.O. Box 7008, Station J Ottawa, Ontario K2A 3Z6 Annual Membership, which includes four issues of ARGO Individual $25 NAUTA and four issues of The Northern Mariner. Institution $50 JANUARY 1992 ARGONAUTA 1 ARGONAUTA EDITORIALS the Prime Minister requires little effort, and the cause surely is deserving. If we and our friends and relatives were to do (I) this, who knows but that it might make all the difference? A few weeks before we began this editorial, Canada observ (II) ed Remembrance Day (or Armistice Day as our American members will know it). -

2015 Owners Manual Glass.Pdf
Keep this manual with the boat at all times. All operators must read and fully understand the operational instructions before the boat is used. Z-Comanche ®, Z100, Angler, Reata ®, Fisherman, Cayman ®, Bay Ranger ®, TR, Bahia, Ghost ®, Phantom and Banshee ® models. Ranger Trail ® trailers. ® Ranger ® boats include a wide variety of advantages in quality, construction and performance. For even more details, visit us at www.rangerboats.com ® ™ ® ® ® ™ ® ™ ™ ® ® ® RPM Performance™ A MESSAGE FROM RANGER FOUNDER, FORREST WOOD Congratulations! You and your new Ranger® are part of a celebrated legacy of leadership spanning over four decades. From the first six boats built in 1968, Ranger has grown into an internationally known household name. Today, it’s the boat of choice for the world’s most accomplished anglers as well as NASCAR, Cabela’s, the Wal-Mart FLW Tour and countless other leading organizations around the globe. Most importantly, though, it’s your boat of choice and we’re truly honored to be a part of your family and the dreams and memories you’ll share with others. As the owner of a new Ranger boat, you’re eligible for even more benefits from the Ranger Owner’s Group. Drop us a line or visit our website at rangerboats.com for more details. It’s just one more way we’d like to say ‘thank you’. This manual is intended to help you better understand your boat while also helping make basic care and maintenance even easier. Additionally, it provides important information essential for safe and pleasant boat operation. Please take the time to study this manual along with your engine and equipment manuals before operating your boat.