Autonomous and Unmanned Systems in the Department of the Navy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Strategic Systems Programs
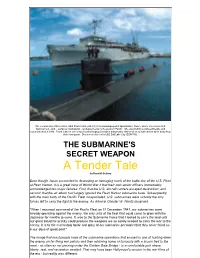
The second ship of their class, USS Frank Cable (AS-40) is forward-deployed at Apra Harbor, Guam, where she serves U.S. Submarines - and - surfaces combatants - on deployments to the western Pacific. She was built by Lockheed/Seattle and commissioned in 1980. Frank Cable is one of two forward-deployed tenders that provide vital services to submarines while away from their homeports. She is seen here with USS Salt Lake City (SSN-716). THE SUBMARINE'S SECRET WEAPON A Tender Tale by Randall Guttery Even though Japan succeeded in destroying or damaging much of the battle line of the U.S. Fleet at Pearl Harbor, it is a great irony of World War II that their own senior officers immediately acknowledged two major failures: First, that the U.S. aircraft carriers escaped destruction; and second, that the air attack had largely ignored the Pearl Harbor submarine base. Subsequently, with the main body of the Pacific Fleet incapacitated, U.S. submarines were virtually the only forces left to carry the fight to the enemy. As Admiral Chester W. Nimitz observed, "When I assumed command of the Pacific Fleet on 31 December 1941, our submarines were already operating against the enemy, the only units of the fleet that could come to grips with the Japanese for months to come. It was to the Submarine Force that I looked to carry the load until our great industrial activity could produce the weapons we so sorely needed to carry the war to the enemy. It is to the everlasting honor and glory of our submarine personnel that they never failed us in our days of great peril." The image that most people have of the submarine operations that ensued is one of hunting down the enemy on far-flung war patrols and then returning home victoriously with a broom tied to the mast - as often as not passing under the Golden Gate Bridge - to a comfortable port where liberty, rest, and recreation awaited. -

Detach for Cause: Examining the Organizational and Cultural Influences on the Dismissal of Surface Warfare Commanding Officers
Detach for Cause: Examining the Organizational and Cultural Influences on the Dismissal of Surface Warfare Commanding Officers A Dissertation submitted to the Graduate School Valdosta State University in partial fulfillment of requirements for the degree of DOCTOR OF PUBLIC ADMINISTRATION in Public Administration in the Department of Political Science of the College of Arts and Sciences May 2014 Michael John Higgs MA, Naval War College, 1997 MPA, University of North Carolina at Charlotte, 1996 MA, Webster University, 1986 BBA, Armstrong State College, 1978 © Copyright 2014 Michael John Higgs All Rights Reserved This dissertation, "Detach for Cause: Examining the Organizational and Cultural Influences on the Dismissal of Surface Warfare Commanding Officers,” by Michael John Higgs, is approved by: Dissertation Committee Gerald A. Merwin, Ph.D. Chair Professor of Public Administration / Committee v— <- —I j —L-A-— Members Carl M. Hand, Ph.D. Professor of Sociology Mary Elfeanor Wickersham, D.P.A. Assistant Professor of Public Affairs College of Coastal Georgia Dean of the College of Arts and Sciences Connie L. Richards, Ph.D. Professor of English Interim Dean of the Graduate School JameiJP. LaPlant, Ph.D. Professor of Political Science FAIR USE This dissertation is protected by the Copyright Laws of the United States (Public Law 94 553, revised in 1976). Consistent with fair use as defined in the Copyright Laws, brief quotations from this material are allowed with proper acknowledgement. Use of the material for financial gain without the author’s expressed written permission is not allowed. DUPLICATION I authorize the Head of Interlibrary Loan or the Head of Archives at the Odum Library at Valdosta State University to arrange for duplication of this dissertation for educational or scholarly purposes when so requested by a library user. -

Steel Navy Website
A Sailor's Life in the New Steel Navy Home Page Banner Credits: Navy Logo from cover of Lawrence, W.J. The United States Navy Illustrated. New York, NY: The Continent Publishing Company, 1898. Sailor images from Naval History and Heritage Command, NH 94006 and NH 101116 At the dawn of the 20thwww.steelnavy.org century, the United States Navy was in the midst of a revolutionary technological transformation. The obsolete wooden sailing ships of the post-Civil War Navy, with their underpowered auxiliary steam engines, were swept away, and replaced by steel-hulled warships with powerful steam engines. This New Steel Navy was the first step in the long process that would eventually lead the United States Navy to a position of world dominance. This website examines the lives of the men who made that transformation possible – the officers and enlisted sailors of the Navy. They lived a life that was rugged and frequently dangerous, a life that was transformed by the new technologies of the ships they served on. They fought battles at sea, and even on land. They existed in a physically claustrophobic, yet socially divided world that adhered to naval traditions both old and new. They endured these hardships, and enjoyed brief moments of fun whenever possible. Pay a visit to an often overlooked moment in time, and get to know the sailors of the New Steel Navy. Video Credits: Title cards created in Photoshop, using graphics from cover of Lawrence, W.J. The United States Navy Illustrated. New York, NY: The Continent Publishing Company, 1898. -

Twenty Foilborne Years, the U.S
TWENTY FOILBORNE YEARS THE U.S. NAVY HYDROFOIL High Point PCH- 1 Wm. M. Ellsworth Prepared for DTNSRDC under Contract #N00600-81-D-0252- FD 36 and FD 40 Approved for Public Release; Distribution Unlimited. This document prepared for the David Taylor Naval Ship Research and Development Center under Contract No. NO06004 I -D-O252-FD36iFD40. TWENTY FOILBORNE YEARS THE U.S. NAVY HYDROFOIL High Point PCH- 1 Wm. M. Ellsworth Prepared for DTNSRDC under Contract #NOO600-8 l-D-0252- FD 36 and FD 40 Table of Contents PAGE . TABLE OF CONTENTS.. ._. .._.. ,__.,,... .,... , . ..I...._. ..I 111 LIST OF FIGURES . .._........._................. .._ . vii . LIST OF TABLES.. .._. .._.................. ,.... .._. _..... .xl11 . ABSTRACT.. ,_. ._. xv PREFACE .._........ .._............ .xvii . CHAPTER I - HYDROFOIL EVOLUTION.. ,. ._. 1 EARLY TEST CRAFT ......................................................................... ............................ 1 EUROPEAN DEVELOPMENT.. ............................................................. ........................... 2 EARLY U.S. NAVY DEVELOPMENTS.. ................................................. ........................... 7 THE LANDING CRAFT DIVERSION .................................................... ........................... 10 THE CANADIAN CONNECTION ......................................................... ........................... 15 DEVELOPMENT OF SEA LEGS ............................................................ ........................... 19 THE MARITIME CONNECTION .......................................................... -

GNM Silent Killers.Qxd:Layout 1
“A truly engrossing chronicle.” Clive Cussler JAMES P. DELGADO SILENT KILLERS SUBMARINES AND UNDERWATER WARFARE FOREWORD BY CLIVE CUSSLER © Osprey Publishing • www.ospreypublishing.com © Osprey Publishing • www.ospreypublishing.com SUBMARINES AND UNDERWATER WARFARE JAMES P. DELGADO With a foreword by Clive Cussler © Osprey Publishing • www.ospreypublishing.com CONTENTS Foreword 6 Author’s Note 7 Introduction: Into the Deep 11 Chapter 1 Beginnings 19 Chapter 2 “Sub Marine Explorers”: Would-be Warriors 31 Chapter 3 Uncivil Warriors 45 Chapter 4 Missing Links 61 Chapter 5 Later 19th Century Submarines 73 Chapter 6 Transition to a New Century 91 Chapter 7 Early 20th Century Submariness 107 Chapter 8 World War I 123 Chapter 9 Submarines Between the Wars 143 Chapter 10 World War II: the Success of the Submarine 161 Chapter 11 Postwar Innovations: the Rise of Atomic Power 189 Chapter 12 The Ultimate Deterrent: the Role of the 207 Submarine in the Modern Era Chapter 13 Memorializing the Submarine 219 Notes 239 Sources & Select Bibliography 248 Index 260 © Osprey Publishing • www.ospreypublishing.com FOREWORD rom the beginning of recorded history the inhabitants of the earth have had a Fgreat fascination with what exists under the waters of lakes, rivers, and the vast seas. They also have maintained a great fear of the unknown and very few wished to actually go under the surface. In the not too distant past, they had a morbid fear and were deeply frightened of what they might find. Only three out of one hundred old-time sailors could swim because they had no love of water. -

The Silent Sentinel August 2009 Page 1 American Submariners Inc
The Silent Sentinel August 2009 Page 1 American Submariners Inc. Non-Profit Org. 4370 Twain Ave. U.S. Postage Paid San Diego, CA 92120-3404 Permit No. 445 Chula Vista, CA The Silent Sentinel AUGUST 2009 Our Creed To perpetuate the memory of our shipmates who gave their lives in the pursuit of their duties while serving their country. That their dedication, deeds, and supreme sacrifice be a constant source of motivation towards greater accom- plishment and patriotism to the United States of America and its Constitution. CONTINUED FROM PAGE 16 BUSTER from land, while the submarine “pull[s] in the full motion video and the infrared, correlate[s] it and fuse[s] it in our battle management centers on board.” Looking ahead, the Navy wants to give its new Virginia-class attack submarines the same ability to carry robots, by outfitting them with a “payload module” similar to the SSGNs’ former missile tubes. Russia To Lay Down One Multipurpose Submarine A Year From 2011 Novosti, July 27, 2009 SEVASTOPOL, July 26 (RIA Novosti) - The Russian Navy command has made a decision on building one nuclear-powered multipurpose attack submarine a year from 2011, the Navy chief said on Sunday. Adm. Vladimir Vysotsky said that construction of a second Project 885 Yasen (Graney) class nuclear-powered multipurpose attack submarine started at the Sevmash shipyard in northern Russia on July 24. Vysotsky said the state currently had all possibilities, including economic and financial, to implement this project as soon as possible. The Kazan submarine will feature more advanced equipment than the first vessel in the series - the Severodvinsk, which was laid down in 1992 and is scheduled to join the Russian navy in 2010 or early 2011 after a long delay for financial reasons. -

Connecticut College Alumni Magazine, Spring 1979
Connecticut College Digital Commons @ Connecticut College Linda Lear Center for Special Collections & Alumni News Archives Spring 1979 Connecticut College Alumni Magazine, Spring 1979 Connecticut College Follow this and additional works at: https://digitalcommons.conncoll.edu/alumnews Recommended Citation Connecticut College, "Connecticut College Alumni Magazine, Spring 1979" (1979). Alumni News. 210. https://digitalcommons.conncoll.edu/alumnews/210 This Magazine is brought to you for free and open access by the Linda Lear Center for Special Collections & Archives at Digital Commons @ Connecticut College. It has been accepted for inclusion in Alumni News by an authorized administrator of Digital Commons @ Connecticut College. For more information, please contact [email protected]. The views expressed in this paper are solely those of the author. EDITORIAL BOARD: Vivian Segall '73 Editor(15A Latham Lane, EXECUTIVE BOARD OF THE ALUMNI ASSOCIA nON: Britta Noank, CT 06340), Gertrude E. Noyes '25, Sarah Hargrove Schein McNemar '67 President I Michael J. Farrar '73 Vice Harris '57, Wayne Swanson, Marilyn EHman Frankel '64, Marion President / Sally Lane Braman '54 Secretary / Platt Townend Vibert Clark '24 Arnold '64 Treasurer Class NOles Editor, Elizabeth Damerel Gongaware '26 Assistant Editor, Britta Schein McNemar '67, Louise Stevenson Directors-at-Large: Anne Godsey Stinnett '56, Terry Munger '50, Andersen '41 ex officio Gwendolyn Rendall Cross '62, Nancy L. Close '72 I Alumni Trustees: Virginia Golden Kent '35, Jane Smith Moody '49, Joan The Connecticut College Alumni Magazine (USPS 129-140). Jacobson Kronick '46 I Chairman of Alumni Giving: Helene Zimmer Official publication of the Connecticut College Alumni Association. Loew '57 I Chairman of Nominating Committee: Ellen Lougee All publication rights reserved. -
USS Albacore (SS-218)
1 OUR CREED: To perpetuate the memory of our shipmates who gave their lives in the pursuit of duties while serving their country. That their dedication, deeds, and supreme sacrifice be a constant source of motivation toward greater accomplishments. Pledge loyalty and patriotism to the United States of America and its constitution. UNITED STATES SUBMARINE VETERANS INCORPORTATED PALMETTO BASE NEWSLETTER November 2013 2 Lost Boats 4 Picture of the Month 14 Featured World War II Submarine Commanding Officer of the Month 15 CO’s Stateroom 17 XO’S Stateroom 18 Members 19 Honorary Members 19 Meeting Attendees 20 Old Business 21 New Business 21 Good of the Order 21 Base Contacts 22 Birthdays 22 Welcome 22 Binnacle List 22 Quote of the Month 22 Word of the Month 22 Member Profile of the Month 23 Traditions of the Naval Service 27 Dates in U.S. Naval History 29 U.S. Submarine History 35 Submarine Memorials 56 Monthly Calendar 62 Submarine Trivia 63 Advertising Partners 64 3 USS Albacore (SS-218) Lost on Nov 7, 1944 with the loss of 86 men when she was sunk off Lost on: northern Hokkaido. Winner of two Presidential Unit Citations, Albacore 11/7/1944 was on her eleventh war patrol and struck a mine while running submerged near a Japanese patrol craft that had detected her. US Navy Official Photo www.bcpatch.com Class: SS 212 Commissioned: 6/1/1942 Launched: 2/17/1942 Builder: Electric Boat Co (General Dynamics) Length: 312 , Beam: 27 #Officers: 6, #Enlisted: 54 Fate: Albacore was assumed to have been lost. -

Eternal Patrol
AMERICAN SUBMARINER2019 • Second Quarter • $6.00 LEST WE FORGET 10 APRIL 1963 22 MAY 1968 || 1 Second Quarter 2019 THE 2019 USSVI SUBMARINE CALENDAR 2019 United States Submarine Calendar UNITED STATES SUBMARINES Submarine Squadrons of the Atlantic Fleet Plan your next reunion in USS Nautilus become an important (SSN 571), national the firsthistoric nuclear landmark vessel, anchoring was a true a trailblazerpopular East and Coast record-breaker, submarine museum.serving the None Navy of 25 the years Force’s under “firsts,” COMSUBLANT however, hasbefore had retiring more impact to USS NAUTILUS (SSN 571) than the truly pioneering initial message sent by this very boat to COMSUBLANT in January of 1955: “UNDERWAY ON NUCLEAR POWER.” NORTH LITTLE ROCK, ARKANSAS! It is our purpose to perpetuate the memory of our shipmates who gave their lives in the pursuit of their duties while serving their country. That their dedication, deeds and supreme sacrifi ce be a constant source of motivation toward greater accomplishments. Pledge loyalty and patriotism to the United States of America and its Constitution. COMSUBLANT Commander, Submarine Force Atlantic (COMSUBLANT) is the Submarine Force U.S. Atlantic Fleet type commander under the United States Fleet Forces Command. The principal responsibility is to operate, maintain, train, and equip submarines. SUBMARINE REUNION PACKAGE COMSUBLANT also has additional duties as commander of NATO’s Allied Submarine Command and also Commander, • Full run of USS Razorback Naval Submarine Forces. Have your next reunion at USS • Experienced sub vets on-hand Dedicated to all U.S. submariners who manned January 2019 Razorback (SS-394), a 90-percent (Five Submarines and 318 men lost) • Group photo our U.S. -

UNITED STATES SUBMARINE VETERANS INCORPORTATED PALMETTO BASE NEWSLETTER November 2011
OUR CREED: To perpetuate the memory of our shipmates who gave their lives in the pursuit of duties while serving their country. That their dedication, deeds, and supreme sacrifice be a constant source of motivation toward greater accomplishments. Pledge loyalty and patriotism to the United States of America and its constitution. UNITED STATES SUBMARINE VETERANS INCORPORTATED PALMETTO BASE NEWSLETTER November 2011 1 Picture of the Month………………………………………………………………………………………………………………...3 Members…………………………………………………………………………………………………………………………………..5 Honorary Members……………………………………………………………………………………………………………………5 Meeting Attendees………………………………………………………………………………………………………………..….6 Old Business….…………………………………………………………………………………………………………………………..6 New Business…………………………………………………………………………………………………………………………….7 Good of the Order……………………………………………………………………………………………………………………..7 Base Contacts…………………………………………………………………………………………………………………………….8 Birthdays……………………………………………………………………………………………………………………………………8 Welcome…………………………………………………………………………………………………………………………………..8 Binnacle List………………………………………………………………………………………………………………………………8 Quote of the Month.…………………………………………………………………………………………………………………8 Robert Gibbs’ Memorial Restoration….…………………..…………………………………………………………………9 Dates in American Naval History………………………………………………………………………………………………16 Dates in U.S. Submarine History………………………………………………………………………………………………22 Traditions of the Naval Service………………………………………………………………………………………………..43 Monthly Calendar……………………………………………………………………………………………………………………46 Lost Boats...................................................................................................................................47 -

SSN 594 Permit - 1978
SSN 594 Permit - 1978 United States Type: SSN - Nuclear Powered Attack Submarine Max Depth: -400 m Max Speed: 30 kt Commissioned: 1978 Length: 84.9 m Beam: 9.6 m Draft: 7.4 m Crew: 112 Displacement: 3810 t Displacement Full: 4370 t Propulsion: 1x S5W Nuclear Reactor Sensors / EW: - AN/WLR-11 - (RWR for AN/WLR-1G, Improved AN/WLR-3 & AN/ALR-52) ESM, RWR, Radar Warning Receiver, Max range: 222.2 km - AN/WLR-1G - (RWR for AN/WLR-1G, Improved AN/WLR-3 & AN/ALR-52) ESM, ELINT, Max range: 926 km - AN/BQS-14 - (RWR for AN/WLR-1G, Improved AN/WLR-3 & AN/ALR-52) Hull Sonar, Active-Only, Hull Sonar, Active-Only Under-Ice Navigation and Mine & Obstacle Avoidance, Max range: 0.4 km - AN/BQQ-5A(V)3 [BQS-11] - (Permit) Hull Sonar, Active/Passive, Hull Sonar, Active/Passive Search & Track, Max range: 74.1 km - AN/BPS-14 - (Permit) Radar, Radar, Surface Search, Short-Range, Max range: 74.1 km - AN/WLR-9 - (AN/BLR-14, Sonar Warning Receiver) Acoustic Intercept (Active Sonar Warning), Acoustic Intercept & Torpedo Warning, Max range: 27.8 km - Generic Submarine Periscope, LLTV - (1970s, Gen 1, 1x/2x Zoom) Visual, LLTV, Surveillance & Navigation Camera, Max range: 27.8 km - Generic Submarine Periscope, Optical - (1970s, 1.5x/8x Zoom) Visual, Visual, Surveillance Periscope, Max range: 41.7 km Weapons / Loadouts: - Mk48 Mod 3 - (1978) Torpedo. Surface Max: 11.1 km. Subsurface Max: 11.1 km. - UUM-44A SUBROC [10kT Nuclear DC] - (1966-1989) Guided Weapon. Subsurface Max: 55.6 km. -

THE NEITHER CONFIRM NOR DENY POLICY: Nuclear Diplomacy at Work
THE NEITHER CONFIRM NOR DENY POLICY: Nuclear Diplomacy At Work A Working Paper Prepared By Hans M. Kristensen Director, Nuclear Information Project Federation of American Scientists 1717 K Street. N.W., Suite 209 Washington, D.C. 20036 Phone : 202-454-4695 Fax : 202-454-675-1010 Website: http://www.fas.org | http://www.nukestrat.com (February 2006) The Neither Confirm Nor Deny Policy Hans M. Kristensen Introduction This working paper is a chronological compilation of statements, documents, and events relating to the policy of the United States to neither confirm not deny the presence (or absence) of nuclear weapons anywhere. The material is collected as part of on-going research into the impact of nuclear weapons on international relations. Because nuclear weapons and nuclear propulsion are so closely related both in terms of policy and operations, the chronology also includes events relating to nuclear-powered warships. The information is derived from official U.S. documents (particularly those released under the Freedom of Information Act), reports and other publications, magazines, and newspaper articles. The working paper is a living document, which means that it continues to be updated as new information becomes available. Incredibly, even after the U.S. Government confirmed the removal of all tactical nuclear weapons from ships and submarines in 1992, the U.S. military continues to uphold the neither confirm nor deny (NCND) policy on its warships, aircraft, and bases, and the State Department continues to punish New Zealand for its non-nuclear legislation against nuclear weapons on visiting warships. Quotation from this document is permitted only with clear reference to title and author.