Chapter 10 Differential Amplifiers
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Notes for Lab 1 (Bipolar (Junction) Transistor Lab)
ECE 327: Electronic Devices and Circuits Laboratory I Notes for Lab 1 (Bipolar (Junction) Transistor Lab) 1. Introduce bipolar junction transistors • “Transistor man” (from The Art of Electronics (2nd edition) by Horowitz and Hill) – Transistors are not “switches” – Base–emitter diode current sets collector–emitter resistance – Transistors are “dynamic resistors” (i.e., “transfer resistor”) – Act like closed switch in “saturation” mode – Act like open switch in “cutoff” mode – Act like current amplifier in “active” mode • Active-mode BJT model – Collector resistance is dynamically set so that collector current is β times base current – β is assumed to be very high (β ≈ 100–200 in this laboratory) – Under most conditions, base current is negligible, so collector and emitter current are equal – β ≈ hfe ≈ hFE – Good designs only depend on β being large – The active-mode model: ∗ Assumptions: · Must have vEC > 0.2 V (otherwise, in saturation) · Must have very low input impedance compared to βRE ∗ Consequences: · iB ≈ 0 · vE = vB ± 0.7 V · iC ≈ iE – Typically, use base and emitter voltages to find emitter current. Finish analysis by setting collector current equal to emitter current. • Symbols – Arrow represents base–emitter diode (i.e., emitter always has arrow) – npn transistor: Base–emitter diode is “not pointing in” – pnp transistor: Emitter–base diode “points in proudly” – See part pin-outs for easy wiring key • “Common” configurations: hold one terminal constant, vary a second, and use the third as output – common-collector ties collector -
I. Common Base / Common Gate Amplifiers
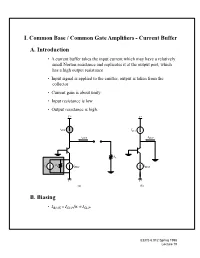
I. Common Base / Common Gate Amplifiers - Current Buffer A. Introduction • A current buffer takes the input current which may have a relatively small Norton resistance and replicates it at the output port, which has a high output resistance • Input signal is applied to the emitter, output is taken from the collector • Current gain is about unity • Input resistance is low • Output resistance is high. V+ V+ i SUP ISUP iOUT IOUT RL R is S IBIAS IBIAS V− V− (a) (b) B. Biasing = /α ≈ • IBIAS ISUP ISUP EECS 6.012 Spring 1998 Lecture 19 II. Small Signal Two Port Parameters A. Common Base Current Gain Ai • Small-signal circuit; apply test current and measure the short circuit output current ib iout + = β v r gmv oib r − o ve roc it • Analysis -- see Chapter 8, pp. 507-509. • Result: –β ---------------o ≅ Ai = β – 1 1 + o • Intuition: iout = ic = (- ie- ib ) = -it - ib and ib is small EECS 6.012 Spring 1998 Lecture 19 B. Common Base Input Resistance Ri • Apply test current, with load resistor RL present at the output + v r gmv r − o roc RL + vt i − t • See pages 509-510 and note that the transconductance generator dominates which yields 1 Ri = ------ gm µ • A typical transconductance is around 4 mS, with IC = 100 A • Typical input resistance is 250 Ω -- very small, as desired for a current amplifier • Ri can be designed arbitrarily small, at the price of current (power dissipation) EECS 6.012 Spring 1998 Lecture 19 C. Common-Base Output Resistance Ro • Apply test current with source resistance of input current source in place • Note roc as is in parallel with rest of circuit g v m ro + vt it r − oc − v r RS + • Analysis is on pp. -

Precision Current Sources and Sinks Using Voltage References
Application Report SNOAA46–June 2020 Precision Current Sources and Sinks Using Voltage References Marcoo Zamora ABSTRACT Current sources and sinks are common circuits for many applications such as LED drivers and sensor biasing. Popular current references like the LM134 and REF200 are designed to make this choice easier by requiring minimal external components to cover a broad range of applications. However, sometimes the requirements of the project may demand a little more than what these devices can provide or set constraints that make them inconvenient to implement. For these cases, with a voltage reference like the TL431 and a few external components, one can create a simple current bias with high performance that is flexible to fit meet the application requirements. Current sources and sinks have been covered extensively in other Texas Instruments application notes such as SBOA046 and SLYC147, but this application note will cover other common current sources that haven't been previously discussed. Contents 1 Precision Voltage References.............................................................................................. 1 2 Current Sink with Voltage References .................................................................................... 2 3 Current Source with Voltage References................................................................................. 4 4 References ................................................................................................................... 6 List of Figures 1 Current -
Lecture 12 Digital Circuits (II) MOS INVERTER CIRCUITS
Lecture 12 Digital Circuits (II) MOS INVERTER CIRCUITS Outline • NMOS inverter with resistor pull-up –The inverter • NMOS inverter with current-source pull-up • Complementary MOS (CMOS) inverter • Static analysis of CMOS inverter Reading Assignment: Howe and Sodini; Chapter 5, Section 5.4 6.012 Spring 2007 Lecture 12 1 1. NMOS inverter with resistor pull-up: Dynamics •CL pull-down limited by current through transistor – [shall study this issue in detail with CMOS] •CL pull-up limited by resistor (tPLH ≈ RCL) • Pull-up slowest VDD VDD R R VOUT: VOUT: HI LO LO HI V : VIN: IN C LO HI CL HI LO L pull-down pull-up 6.012 Spring 2007 Lecture 12 2 1. NMOS inverter with resistor pull-up: Inverter design issues Noise margins ↑⇒|Av| ↑⇒ •R ↑⇒|RCL| ↑⇒ slow switching •gm ↑⇒|W| ↑⇒ big transistor – (slow switching at input) Trade-off between speed and noise margin. During pull-up we need: • High current for fast switching • But also high incremental resistance for high noise margin. ⇒ use current source as pull-up 6.012 Spring 2007 Lecture 12 3 2. NMOS inverter with current-source pull-up I—V characteristics of current source: iSUP + 1 ISUP r i oc vSUP SUP _ vSUP Equivalent circuit models : iSUP + ISUP r r vSUP oc oc _ large-signal model small-signal model • High current throughout voltage range vSUP > 0 •iSUP = 0 for vSUP ≤ 0 •iSUP = ISUP + vSUP/ roc for vSUP > 0 • High small-signal resistance roc. 6.012 Spring 2007 Lecture 12 4 NMOS inverter with current-source pull-up Static Characteristics VDD iSUP VOUT VIN CL Inverter characteristics : iD = V 4 3 VIN VGS I + DD SUP roc 2 1 = vOUT vDS VDD (a) VOUT 1 2 3 4 VIN (b) High roc ⇒ high noise margins 6.012 Spring 2007 Lecture 12 5 PMOS as current-source pull-up I—V characteristics of PMOS: + S + VSG _ VSD G B − _ + IDp 5 V + D − V + G − V − D − ID(VSG,VSD) (a) = VSG 3.5 V 300 V = V + V = V − 1 V 250 (triode SD SG Tp SG region) V = 3 V 200 SG − IDp (µA) (saturation region) 150 = VSG 25 100 = 0, 0.5, VSG 1 V (cutoff region) V = 2 V 50 SG = VSG 1.5 V 12345 VSD (V) (b) Note: enhancement-mode PMOS has VTp <0. -

Transistor Current Source
PY 452 Advanced Physics Laboratory Hans Hallen Electronics Labs One electronics project should be completed. If you do not know what an op-amp is, do either lab 2 or lab 3. A written report is due, and should include a discussion of the circuit with inserted equations and plots as appropriate to substantiate the words and show that the measurements were taken. The report should not consist of the numbered items below and short answers, but should be one coherent discussion that addresses most of the issues brought out in the numbered items below. This is not an electronics course. Familiarity with electronics concepts such as input and output impedance, noise sources and where they matter, etc. are important in the lab AND SHOULD APPEAR IN THE REPORT. The objective of this exercise is to gain familiarity with these concepts. Electronics Lab #1 Transistor Current Source Task: Build and test a transistor current source, , +V with your choice of current (but don't exceed the transistor, power supply, or R ratings). R1 Rload You may wish to try more than one current. (1) Explain your choice of R1, R2, and Rsense. VCE (a) In particular, use the 0.6 V drop of VBE - rule for current flow to calculate I in R2 VBE Rsense terms of Rsense, and the Ic/Ib rule to estimate Ib hence the values of R1&R2. (2) Try your source over a wide range of Rload values, plot Iload vs. Rload and interpret. You may find it instructive to look at VBE and VCE with a floating (neither side grounded) multimeter. -

Differential Amplifiers
www.getmyuni.com Operational Amplifiers: The operational amplifier is a direct-coupled high gain amplifier usable from 0 to over 1MH Z to which feedback is added to control its overall response characteristic i.e. gain and bandwidth. The op-amp exhibits the gain down to zero frequency. Such direct coupled (dc) amplifiers do not use blocking (coupling and by pass) capacitors since these would reduce the amplification to zero at zero frequency. Large by pass capacitors may be used but it is not possible to fabricate large capacitors on a IC chip. The capacitors fabricated are usually less than 20 pf. Transistor, diodes and resistors are also fabricated on the same chip. Differential Amplifiers: Differential amplifier is a basic building block of an op-amp. The function of a differential amplifier is to amplify the difference between two input signals. How the differential amplifier is developed? Let us consider two emitter-biased circuits as shown in fig. 1. Fig. 1 The two transistors Q1 and Q2 have identical characteristics. The resistances of the circuits are equal, i.e. RE1 = R E2, RC1 = R C2 and the magnitude of +VCC is equal to the magnitude of �VEE. These voltages are measured with respect to ground. To make a differential amplifier, the two circuits are connected as shown in fig. 1. The two +VCC and �VEE supply terminals are made common because they are same. The two emitters are also connected and the parallel combination of RE1 and RE2 is replaced by a resistance RE. The two input signals v1 & v2 are applied at the base of Q1 and at the base of Q2. -

Current Source & Source Transformation Notes
EE301 – CURRENT SOURCES / SOURCE CONVERSION Learning Objectives a. Analyze a circuit consisting of a current source, voltage source and resistors b. Convert a current source and a resister into an equivalent circuit consisting of a voltage source and a resistor c. Evaluate a circuit that contains several current sources in parallel Ideal sources An ideal source is an active element that provides a specified voltage or current that is completely independent of other circuit elements. DC Voltage DC Current Source Source Constant Current Sources The voltage across the current source (Vs) is dependent on how other components are connected to it. Additionally, the current source voltage polarity does not have to follow the current source’s arrow! 1 Example: Determine VS in the circuit shown below. Solution: 2 Example: Determine VS in the circuit shown above, but with R2 replaced by a 6 k resistor. Solution: 1 8/31/2016 EE301 – CURRENT SOURCES / SOURCE CONVERSION 3 Example: Determine I1 and I2 in the circuit shown below. Solution: 4 Example: Determine I1 and VS in the circuit shown below. Solution: Practical voltage sources A real or practical source supplies its rated voltage when its terminals are not connected to a load (open- circuited) but its voltage drops off as the current it supplies increases. We can model a practical voltage source using an ideal source Vs in series with an internal resistance Rs. Practical current source A practical current source supplies its rated current when its terminals are short-circuited but its current drops off as the load resistance increases. We can model a practical current source using an ideal current source in parallel with an internal resistance Rs. -

Class 08: NMOS, Pseudo-NMOS
Class 08: NMOS, Pseudo-NMOS Topics: •02 NMOS Logic Gates •03 NMOS Logic Gates •04 Pseudo-NMOS •05 Pseudo-NMOS •06 Transistor Equivalency Dr. Joseph Elias; Dr. Andrew Mason 1 Class 08: NMOS, Pseudo-NMOS NMOS (Martin c. 1) § nMOS Inverter with resistive load § nMOS Inverter with depletion load Depletion nMOS, Vtn < 0 always ON for VGS = 0 § switch level model W/L Q1 > W/L Q2 so Q1 can “pull down” Vout § nMOS NOR gate c = a+b (a) NMOS off (b) NMOS on want to realize resistor with a transistor § nMOS NAND gate § Including transistor resistance c = ab rds º channel resistance RL >> rds so output close to 0V Dr. Joseph Elias; Dr. Andrew Mason 2 Class 08: NMOS, Pseudo-NMOS NMOS (Martin c. 1) • General nMOS schematic Examples: depletion-load nMOS logic – single load transistor – parallel and series nMOS transistor to complete the compliment of the desired function i.e., they determine when the output is low “0” rather than high “1” Dr. Joseph Elias; Dr. Andrew Mason 3 Class 08: NMOS, Pseudo-NMOS Pseudo-NMOS (Martin c. 4) •NMOS Common-Source Amplifier with •Pseudo-NMOS inverter with PMOS load current sourrce load and load capacitor •Choose W/L so that: •Choose Vbias in between VDD and ground Q2 always on since |Vgs| > |Vtp| Q2 in saturation if (for VDD=3.3) |Vds| > |Veff| > |Vgs| – |Vt| VDD – Vout > |Vgs| - |Vt| Vout < VDD - |Vgs| + |Vt| Vout < 1.65 + Vt < 2.45 Q1 in saturation if Vgs = Vin > Vt Vds > Veff > Vgs – Vt => •Current-source realized with a PMOS transistor Vout > Vin - Vt •Power Dissipation: Veff = Vgs - Vt output low (Vin is high): P = IL * VDD Vds = Vgs + Vdg at saturation, Vdg=-Vt output high (Vin is low): P = 0 Valid if: average static dissipation: P = ½ * IL * VDD Veff = |Vds-sat| > |Vgs| - |Vtp| -want drain at least Vt from gate Dr. -

621 212 Electronics and Communication Engineering Ec6304/Linear Integrated Circuits
DSEC/ECE/EC6304-LIC/QB 1 DHANALAKSHMI SRINIVASAN ENGINEERING COLLEGE -621 212 ELECTRONICS AND COMMUNICATION ENGINEERING EC6304/LINEAR INTEGRATED CIRCUITS QUESTION BANK UNIT 1(2 MARKS) 1. What is an integrated circuit? APRIL/MAY 2010 An integrated circuit (IC) is a miniature, low cost electronic circuit consisting of active and Passive components fabricated together on a single crystal of silicon. The active components are Transistors and diodes and passive components are resistors and capacitors. 2. What is current mirror? APRIL/MAY 2010 A constant current source (current mirror) makes use of the fact that for a transistor in the active mode of operation, the collector current is relatively independent of the collector voltage 3. What are two requirements to be met for a good current source? MAY/JUNE 2012 a. Superior insensitivity of circuit performance to power supply variations and temperature. b. More economical than resistors in terms of die area required providing bias currents of small value. c. When used as load element, the high incremental resistance of current source results in high voltage gains at low supply voltages. 4. What are all the important characteristics of ideal op-amp? APRIL/MAY 2015 Ideal characteristics of OPAMP 1. Open loop gain infinite 2. Input impedance infinite 3. Output impedance low 4. Bandwidth infinite 5. Zero offset, ie, Vo=0 when V1=V2=0 5. Define CMRR of OP-AMP APRIL/MAY 2011 The relative sensitivity of an op-amp to a difference signal as compared to a common - mode signal is called the common -mode rejection ratio. It is expressed in decibels. -

Fully-Differential Amplifiers
Application Report S Fully-Differential Amplifiers James Karki AAP Precision Analog ABSTRACT Differential signaling has been commonly used in audio, data transmission, and telephone systems for many years because of its inherent resistance to external noise sources. Today, differential signaling is becoming popular in high-speed data acquisition, where the ADC’s inputs are differential and a differential amplifier is needed to properly drive them. Two other advantages of differential signaling are reduced even-order harmonics and increased dynamic range. This report focuses on integrated, fully-differential amplifiers, their inherent advantages, and their proper use. It is presented in three parts: 1) Fully-differential amplifier architecture and the similarities and differences from standard operational amplifiers, their voltage definitions, and basic signal conditioning circuits; 2) Circuit analysis (including noise analysis), provides a deeper understanding of circuit operation, enabling the designer to go beyond the basics; 3) Various application circuits for interfacing to differential ADC inputs, antialias filtering, and driving transmission lines. Contents 1 Introduction . 3 2 What Is an Integrated, Fully-Differential Amplifier? . 3 3 Voltage Definitions . 5 4 Increased Noise Immunity . 5 5 Increased Output Voltage Swing . 6 6 Reduced Even-Order Harmonic Distortion . 6 7 Basic Circuits . 6 8 Circuit Analysis and Block Diagram . 8 9 Noise Analysis . 13 10 Application Circuits . 15 11 Terminating the Input Source . 15 12 Active Antialias Filtering . 20 13 VOCM and ADC Reference and Input Common-Mode Voltages . 23 14 Power Supply Bypass . 25 15 Layout Considerations . 25 16 Using Positive Feedback to Provide Active Termination . 25 17 Conclusion . 27 1 SLOA054E List of Figures 1 Integrated Fully-Differential Amplifier vs Standard Operational Amplifier. -

AN-1530 Application Note
AN-1530 APPLICATION NOTE One Technology Way • P. O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • www.analog.com High Precision, Low Cost Current Sources Using the AD8276 Difference Amplifier and the AD8603 Op Amp CIRCUIT FUNCTION AND BENEFITS integrated current source, and the AD7794 is a high resolution, Current sources are widely used in industrial, communication, Σ-Δ, analog-to-digital converter (ADC) with two integrated and other equipment for sensor excitation and machine to current sources. For high currents, external MOSFETs or machine communication. For example, the 4 mA to 20 mA loop transistors are generally required. is widely used in process control equipment. Current sources using the low power AD8276 difference amplifier Programmable current sources can be built using a digital-to- and the AD8603 op amp are affordable, flexible, and is small in analog converter (DAC), op amp or difference amplifier, and size. Performance characteristics such as initial error, temperature matched resistors. Low value current sources can be integrated drift, and power dissipation make the AD8276 and the AD8603 into low output current sources or amplifiers. For example, the ideal candidates. AD8290 is an instrumentation amplifier with a single, +5V +VS 7 AD8276 RF1 40kΩ SENSE 5 –IN RG1 40kΩ 2 T1 OUT 6 RG2 40kΩ V V 3 OUT REF +IN RF2 40kΩ REF +5V R1 1 3 5 V 1 LOAD 4 4 AD8603 I –VS 2 O RLOAD 08358-001 Figure 1. Current Source Using the AD8276 Difference Amplifier and the AD8603 Op Amp (Simplified Schematic) Rev. -
Mosfet Differential Amplifier (Two-Week Lab)
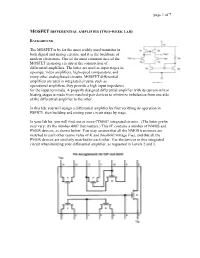
page 1 of 7 MOSFET DIFFERENTIAL AMPLIFIER (TWO-WEEK LAB) BACKGROUND The MOSFET is by far the most widely used transistor in both digital and analog circuits, and it is the backbone of modern electronics. One of the most common uses of the MOSFET in analog circuits is the construction of differential amplifiers. The latter are used as input stages in op-amps, video amplifiers, high-speed comparators, and many other analog-based circuits. MOSFET differential amplifiers are used in integrated circuits, such as operational amplifiers, they provide a high input impedance for the input terminals. A properly designed differential amplifier with its current-mirror biasing stages is made from matched-pair devices to minimize imbalances from one side of the differential amplifier to the other. In this lab, you will design a differential amplifier by first verifying its operation in PSPICE, then building and testing your circuit stage by stage. In your lab kit, you will find one or more CD4007 integrated circuits. (The letter prefix may vary; it's the number 4007 that matters.) This IC contains a number of NMOS and PMOS devices, as shown below. You may assume that all the NMOS transistors are matched to each other (same value of K and threshold voltage VTR), and that all the PMOS devices are similarly matched to each other. Use the devices in this integrated circuit when building your differential amplifier, as requested in Levels 2 and 3. page 2 of 7 BACKGROUND The general topology of a differential amplifier is shown below. Two active devices are connected to a positive voltage supply via passive series elements.