II: "Representations of Celestial Coordinates in FITS"
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

5–21 5.5 Miscellaneous Projections GMT Supports 6 Common
GMT TECHNICAL REFERENCE & COOKBOOK 5–21 5.5 Miscellaneous Projections GMT supports 6 common projections for global presentation of data or models. These are the Hammer, Mollweide, Winkel Tripel, Robinson, Eckert VI, and Sinusoidal projections. Due to the small scale used for global maps these projections all use the spherical approximation rather than more elaborate elliptical formulae. 5.5.1 Hammer Projection (–Jh or –JH) The equal-area Hammer projection, first presented by Ernst von Hammer in 1892, is also known as Hammer-Aitoff (the Aitoff projection looks similar, but is not equal-area). The border is an ellipse, equator and central meridian are straight lines, while other parallels and meridians are complex curves. The projection is defined by selecting • The central meridian • Scale along equator in inch/degree or 1:xxxxx (–Jh), or map width (–JH) A view of the Pacific ocean using the Dateline as central meridian is accomplished by running the command pscoast -R0/360/-90/90 -JH180/5 -Bg30/g15 -Dc -A10000 -G0 -P -X0.1 -Y0.1 > hammer.ps 5.5.2 Mollweide Projection (–Jw or –JW) This pseudo-cylindrical, equal-area projection was developed by Mollweide in 1805. Parallels are unequally spaced straight lines with the meridians being equally spaced elliptical arcs. The scale is only true along latitudes 40˚ 44' north and south. The projection is used mainly for global maps showing data distributions. It is occasionally referenced under the name homalographic projection. Like the Hammer projection, outlined above, we need to specify only -

Applications of Solar Wind Particle Impact Simulations at Lunar Magnetic Anomalies to the Study of Lunar Swirls
47th Lunar and Planetary Science Conference (2016) 2648.pdf APPLICATIONS OF SOLAR WIND PARTICLE IMPACT SIMULATIONS AT LUNAR MAGNETIC ANOMALIES TO THE STUDY OF LUNAR SWIRLS. C. J. Tai Udovicic1, G. Y. Kramer2, and E. M. Harnett3, 1Dept of Earth Sciences, University of Toronto, 22 Russell St, Toronto, ON, Canada, ([email protected]), 2Lunar and Planetary Institute, 3600 Bay Area Bvld, Houston, TX, ([email protected]), 3University of Washington, Earth and Space Sciences, Seattle, WA ([email protected]). Introduction: Lunar swirls are high albedo features highlands often appear to have swirl-like anomalies due that exhibit low spectral maturity. They have been to their complicated topography. To mitigate this, we identified at various sites on the Moon, and all coincide generated a slope map from the WAC GLD100 (SLP), with a lunar magnetic anomaly (magnomaly) [1], which we overlayed with the WAC 643 nm normalized although not all magnomalies have an identifiable swirl. reflectance image to distinguish high albedo swirls from The leading hypothesis for lunar swirl origin is high albedo slopes. Even so, after one pass of the region, presented in [2] as magnetic field standoff of the solar only about half of the swirls could be detected with this wind which causes uneven space weathering at the swirl method alone. The remaining half were found after surface. This hypothesis fails to explain why lunar using particle simulations as a guide. swirls are observed at some but not all of the magnetic Solar wind particle tracking simulations: We anomalies present on the Moon. To investigate the solar used the 2D solar wind particle tracking simulation wind standoff hypothesis further and to improve swirl presented in [2]. -

A Bevy of Area Preserving Transforms for Map Projection Designers.Pdf
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2018): A bevy of area-preserving transforms for map projection designers, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2018.1452632 To link to this article: https://doi.org/10.1080/15230406.2018.1452632 Published online: 05 Apr 2018. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2018 https://doi.org/10.1080/15230406.2018.1452632 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Sometimes map projection designers need to create equal-area projections to best fill the Received 1 January 2018 projections’ purposes. However, unlike for conformal projections, few transformations have Accepted 12 March 2018 been described that can be applied to equal-area projections to develop new equal-area projec- KEYWORDS tions. Here, I survey area-preserving transformations, giving examples of their applications and Map projection; equal-area proposing an efficient way of deploying an equal-area system for raster-based Web mapping. projection; area-preserving Together, these transformations provide a toolbox for the map projection designer working in transformation; the area-preserving domain. area-preserving homotopy; Strebe 1995 projection 1. Introduction two categories: plane-to-plane transformations and “sphere-to-sphere” transformations – but in quotes It is easy to construct a new conformal projection: Find because the manifold need not be a sphere at all. -

Apollo 17 Index: 70 Mm, 35 Mm, and 16 Mm Photographs
General Disclaimer One or more of the Following Statements may affect this Document This document has been reproduced from the best copy furnished by the organizational source. It is being released in the interest of making available as much information as possible. This document may contain data, which exceeds the sheet parameters. It was furnished in this condition by the organizational source and is the best copy available. This document may contain tone-on-tone or color graphs, charts and/or pictures, which have been reproduced in black and white. This document is paginated as submitted by the original source. Portions of this document are not fully legible due to the historical nature of some of the material. However, it is the best reproduction available from the original submission. Produced by the NASA Center for Aerospace Information (CASI) Preparation, Scanning, Editing, and Conversion to Adobe Portable Document Format (PDF) by: Ronald A. Wells University of California Berkeley, CA 94720 May 2000 A P O L L O 1 7 I N D E X 7 0 m m, 3 5 m m, A N D 1 6 m m P H O T O G R A P H S M a p p i n g S c i e n c e s B r a n c h N a t i o n a l A e r o n a u t i c s a n d S p a c e A d m i n i s t r a t i o n J o h n s o n S p a c e C e n t e r H o u s t o n, T e x a s APPROVED: Michael C . -

COORDINATES, TIME, and the SKY John Thorstensen
COORDINATES, TIME, AND THE SKY John Thorstensen Department of Physics and Astronomy Dartmouth College, Hanover, NH 03755 This subject is fundamental to anyone who looks at the heavens; it is aesthetically and mathematically beautiful, and rich in history. Yet I'm not aware of any text which treats time and the sky at a level appropriate for the audience I meet in the more technical introductory astronomy course. The treatments I've seen either tend to be very lengthy and quite technical, as in the classic texts on `spherical astronomy', or overly simplified. The aim of this brief monograph is to explain these topics in a manner which takes advantage of the mathematics accessible to a college freshman with a good background in science and math. This math, with a few well-chosen extensions, makes it possible to discuss these topics with a good degree of precision and rigor. Students at this level who study this text carefully, work examples, and think about the issues involved can expect to master the subject at a useful level. While the mathematics used here are not particularly advanced, I caution that the geometry is not always trivial to visualize, and the definitions do require some careful thought even for more advanced students. Coordinate Systems for Direction Think for the moment of the problem of describing the direction of a star in the sky. Any star is so far away that, no matter where on earth you view it from, it appears to be in almost exactly the same direction. This is not necessarily the case for an object in the solar system; the moon, for instance, is only 60 earth radii away, so its direction can vary by more than a degree as seen from different points on earth. -

Arxiv:Astro-Ph/0608273 V1 13 Aug 2006 Ln Oteotclpt Ea Ocuetemanuscript the Conclude IV
CORE Metadata, citation and similar papers at core.ac.uk Provided by CERN Document Server Spherical Trigonometry of the Projected Baseline Angle Richard J. Mathar∗ Leiden Observatory, P.O. Box 9513, 2300 RA Leiden, The Netherlands (Dated: August 15, 2006) The basic geometry of a stellar interferometer with two telescopes consists of a baseline vector and a direction to a star. Two derived vectors are the delay vector, and the projected baseline vector in the plane of the wavefronts of the stellar light. The manuscript deals with the trigonometry of projecting the baseline further outwards onto the celestial sphere. The position angle of the projected baseline is defined, measured in a plane tangential to the celestial sphere, tangent point at the position of the star. This angle represents two orthogonal directions on the sky, differential star positions which are aligned with or orthogonal to the gradient of the delay recorded in the u−v plane. The North Celestial Pole is chosen as the reference direction of the projected baseline angle, adapted to the common definition of the “parallactic” angle. PACS numbers: 95.10.Jk, 95.75.Kk Keywords: projected baseline; parallactic angle; position angle; celestial sphere; spherical astronomy; stellar interferometer I. SCOPE II. SITE GEOMETRY A. Telescope Positions The paper describes a standard to define the plane that 1. Spherical Approximation contains the baseline of a stellar interferometer and the star, and its intersection with the Celestial Sphere. This In a geocentric coordinate system, the Cartesian coor- intersection is a great circle, and its section between the dinates of the two telescopes of a stellar interferometer star and the point where the stretched baseline meets the are related to the geographic longitude λi, latitude Φi Celestial Sphere defines an oriented projected baseline. -

Strategy for Optimal, Long-Term Stationkeeping of Libration Point Orbits in the Earth-Moon System
Strategy for Optimal, Long-Term Stationkeeping of Libration Point Orbits in the Earth-Moon System Thomas A. Pavlak∗ and Kathleen C. Howelly Purdue University, West Lafayette, IN, 47907-2045, USA In an effort to design low-cost maneuvers that reliably maintain unstable libration point orbits in the Earth-Moon system for long durations, an existing long-term stationkeeping strategy is augmented to compute locally optimal maneuvers that satisfy end-of-mission constraints downstream. This approach reduces stationkeeping costs for planar and three- dimensional orbits in dynamical systems of varying degrees of fidelity and demonstrates the correlation between optimal maneuver direction and the stable mode observed during ARTEMIS mission operations. An optimally-constrained multiple shooting strategy is also introduced that is capable of computing near optimal maintenance maneuvers without formal optimization software. I. Introduction Most orbits in the vicinity of collinear libration points are inherently unstable and, consequently, sta- tionkeeping strategies are a critical component of mission design and operations in these chaotic dynamical regions. Stationkeeping is particularly important for libration point missions in the Earth-Moon system since fast time scales require that orbit maintenance maneuvers be implemented approximately once per week. Assuming that acceptable orbit determination solutions require 3-4 days to obtain, stationkeeping ∆V planning activities must be quick, efficient, and effective. Furthermore, the duration of a libration point mission is often dictated by the remaining propellant so a key capability is maintenance maneuvers that are low-cost. Thus, to accommodate a likely increase in future operations in the vicinity of the Earth-Moon libration points, fast, reliable algorithms capable of rapidly computing low-cost stationkeeping maneuvers, with little or no human interaction, are critical. -

Simulations of Particle Impact at Lunar Magnetic Anomalies and Comparison with Spectral Observations
Simulations of Particle Impact at Lunar Magnetic Anomalies and Comparison with Spectral Observations Erika Harnett∗ Department of Earth and Space Science, University of Washington,Seattle, WA 98195-1310, USA Georgiana Kramer Lunar and Planetary Institute, 3600 Bay Area Blvd, Houston, TX 77058, USA Christian Udovicic Department of Physics, University of Toronto, 60 St George St,Toronto, ON M5S 1A7, Canada Ruth Bamford RAL Space, STFC, Rutherford Appleton Laboratory,Chilton, Didcot Ox11 0Qx, UK (Dated: November 5, 2018) Ever since the Apollo era, a question has remained as to the origin of the lunar swirls (high albedo regions coincident with the regions of surface magnetization). Different processes have been proposed for their origin. In this work we test the idea that the lunar swirls have a higher albedo relative to surrounding regions because they deflect incoming solar wind particles that would otherwise darken the surface. 3D particle tracking is used to estimate the influence of five lunar magnetic anomalies on incoming solar wind. The regions investigated include Mare Ingenii, Gerasimovich, Renier Gamma, Northwest of Apollo and Marginis. Both protons and electrons are tracked as they interact with the anomalous magnetic field and impact maps are calculated. The impact maps are then compared to optical observations and comparisons are made between the maxima and minima in surface fluxes and the albedo and optical maturity of the regions. Results show deflection of slow to typical solar wind particles on a larger scale than the fine scale optical, swirl, features. It is found that efficiency of a particular anomaly for deflection of incoming particles does not only scale directly with surface magnetic field strength, but also is a function of the coherence of the magnetic field. -

Mars Astrobiological Cave and Internal Habitability Explorer (MACIE): a New Frontiers Mission Concept
Mars Astrobiological Cave and Internal habitability Explorer (MACIE): A New Frontiers Mission Concept By: C. Phillips-Lander ([email protected])1, A. Agha-mohamamdi2, J. J. Wynne3, T. N. Titus4, N. Chanover5, C. Demirel-Floyd6, K. Uckert2, K. Williams4, D. Wyrick1, J.G. Blank7,8, P. Boston8, K. Mitchell2, A. Kereszturi9, J. Martin-Torres10,11, S. Shkolyar12, N. Bardabelias13, S. Datta14, K. Retherford1, Lydia Sam11, A. Bhardwaj11, A. Fairén15,16, D. Flannery17, R. Wiens17 1Southwest Research Institute 2 NASA Jet Propulsion Laboratory 3Northern Arizona University 4U.S. Geological Survey 5New Mexico State University 6University of Oklahoma 7Blue Marble Space Institute of Science 8NASA Ames Research Center 9Konkoly Thege Miklos Astronomical Institute, Budapest, Hungary 10Instituto Andaluz de Ciencias de la Tierra (CSIC-UGR), Spain 11University of Aberdeen, United Kingdo 12USRA/NASA Goddard 13University of Arizona 14University of Texas-San Antonio 15Centro de Astrobiogía, Spain 16Cornell University 17Queensland University for Technology, Australia 18Los Alamos National Laboratory Cosigners 1 Summary of Key Points 1. Martian subsurface habitability and astrobiology can be evaluated via a lava tube cave, without drilling. 2. MACIE addresses two key goals of the Decadal Survey (2013-2022) and three MEPAG goals. 3. New advances in robotic architectures, autonomous navigation, target sample selection, and analysis will enable MACIE to explore the Martian subsurface. 1. Martian lava tubes are one of the best places to search for evidence of life The Mars Astrobiological Cave and Internal habitability Explorer (MACIE) mission concept is named for Macie Roberts, one of NASA’s ‘human computers’ (Conway 2007). MACIE would access the Martian subsurface via a lava tube. -

Trajectory Design Tools for Libration and Cislunar Environments
TRAJECTORY DESIGN TOOLS FOR LIBRATION AND CISLUNAR ENVIRONMENTS David C. Folta, Cassandra M. Webster, Natasha Bosanac, Andrew D. Cox, Davide Guzzetti, and Kathleen C. Howell National Aeronautics and Space Administration Goddard Space Flight Center, Greenbelt, MD, 20771 [email protected], [email protected] School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN 47907 {nbosanac,cox50,dguzzett,howell}@purdue.edu ABSTRACT supplies insight into the natural dynamics associated with multi- body systems. In fact, such information enables a rapid and robust Innovative trajectory design tools are required to support methodology for libration point orbit and transfer design when challenging multi-body regimes with complex dynamics, uncertain used in combination with numerical techniques such as targeting perturbations, and the integration of propulsion influences. Two and optimization. distinctive tools, Adaptive Trajectory Design and the General Strategies that offer interactive access to a variety of solutions Mission Analysis Tool have been developed and certified to enable a thorough and guided exploration of the trajectory design provide the astrodynamics community with the ability to design space. ATD is intended to provide access to well-known solutions multi-body trajectories. In this paper we discuss the multi-body that exist within the framework of the Circular Restricted Three- design process and the capabilities of both tools. Demonstrable Body Problem (CR3BP) by leveraging both interactive and applications to confirmed missions, the Lunar IceCube CubeSat automated features to facilitate trajectory design in multi-body mission and the Wide-Field Infrared Survey Telescope Sun-Earth regimes [8]. In particular, well-known solutions from the CR3BP, such as body-centered, resonant and libration point periodic and L2 mission, are presented. -
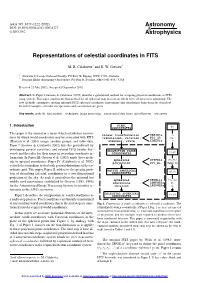
Representations of Celestial Coordinates in FITS
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Instrument Manual
MODS Instrument Manual Document Number: OSU-MODS-2011-003 Version: 1.2.4 Date: 2012 February 7 Prepared by: R.W. Pogge, The Ohio State University MODS Instrument Manual Distribution List Recipient Institution/Company Number of Copies Richard Pogge The Ohio State University 1 (file) Chris Kochanek The Ohio State University 1 (PDF) Mark Wagner LBTO 1 (PDF) Dave Thompson LBTO 1 (PDF) Olga Kuhn LBTO 1 (PDF) Document Change Record Version Date Changes Remarks 0.1 2011-09-01 Outline and block draft 1.0 2011-12 Too many to count... First release for comments 1.1 2012-01 Numerous comments… First-round comments 1.2 2012-02-07 LBTO comments First Partner Release 2 MODS Instrument Manual OSU-MODS-2011-003 Version 1.2 Contents 1 Introduction .................................................................................................................. 6 1.1 Scope .......................................................................................................................... 6 1.2 Citing and Acknowledging MODS ............................................................................ 6 1.3 Online Materials ......................................................................................................... 6 1.4 Acronyms and Abbreviations ..................................................................................... 7 2 Instrument Characteristics .......................................................................................... 8 2.1 Instrument Configurations .......................................................................................