PERL – a Register-Less Processor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
State Model Syllabus for Undergraduate Courses in Science (2019-2020)
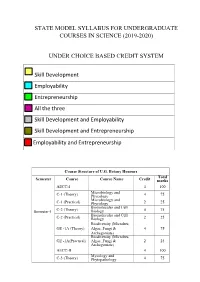
STATE MODEL SYLLABUS FOR UNDERGRADUATE COURSES IN SCIENCE (2019-2020) UNDER CHOICE BASED CREDIT SYSTEM Skill Development Employability Entrepreneurship All the three Skill Development and Employability Skill Development and Entrepreneurship Employability and Entrepreneurship Course Structure of U.G. Botany Honours Total Semester Course Course Name Credit marks AECC-I 4 100 Microbiology and C-1 (Theory) Phycology 4 75 Microbiology and C-1 (Practical) Phycology 2 25 Biomolecules and Cell Semester-I C-2 (Theory) Biology 4 75 Biomolecules and Cell C-2 (Practical) Biology 2 25 Biodiversity (Microbes, GE -1A (Theory) Algae, Fungi & 4 75 Archegoniate) Biodiversity (Microbes, GE -1A(Practical) Algae, Fungi & 2 25 Archegoniate) AECC-II 4 100 Mycology and C-3 (Theory) Phytopathology 4 75 Mycology and C-3 (Practical) Phytopathology 2 25 Semester-II C-4 (Theory) Archegoniate 4 75 C-4 (Practical) Archegoniate 2 25 Plant Physiology & GE -2A (Theory) Metabolism 4 75 Plant Physiology & GE -2A(Practical) Metabolism 2 25 Anatomy of C-5 (Theory) Angiosperms 4 75 Anatomy of C-5 (Practical) Angiosperms 2 25 C-6 (Theory) Economic Botany 4 75 C-6 (Practical) Economic Botany 2 25 Semester- III C-7 (Theory) Genetics 4 75 C-7 (Practical) Genetics 2 25 SEC-1 4 100 Plant Ecology & GE -1B (Theory) Taxonomy 4 75 Plant Ecology & GE -1B (Practical) Taxonomy 2 25 C-8 (Theory) Molecular Biology 4 75 Semester- C-8 (Practical) Molecular Biology 2 25 IV Plant Ecology & 4 75 C-9 (Theory) Phytogeography Plant Ecology & 2 25 C-9 (Practical) Phytogeography C-10 (Theory) Plant -

Implicitly-Multithreaded Processors
Appears in the Proceedings of the 30th Annual International Symposium on Computer Architecture (ISCA) Implicitly-Multithreaded Processors Il Park, Babak Falsafi∗ and T. N. Vijaykumar School of Electrical & Computer Engineering ∗Computer Architecture Laboratory (CALCM) Purdue University Carnegie Mellon University {parki,vijay}@ecn.purdue.edu [email protected] http://www.ece.cmu.edu/~impetus Abstract In this paper, we propose the Implicitly-Multi- Threaded (IMT) processor. IMT executes compiler-speci- This paper proposes the Implicitly-MultiThreaded fied speculative threads from a sequential program on a (IMT) architecture to execute compiler-specified specula- wide-issue SMT pipeline. IMT is based on the fundamental tive threads on to a modified Simultaneous Multithreading observation that Multiscalar’s execution model — i.e., pipeline. IMT reduces hardware complexity by relying on compiler-specified speculative threads [10] — can be the compiler to select suitable thread spawning points and decoupled from the processor organization — i.e., distrib- orchestrate inter-thread register communication. To uted processing cores. Multiscalar [10] employs sophisti- enhance IMT’s effectiveness, this paper proposes three cated specialized hardware, the register ring and address novel microarchitectural mechanisms: (1) resource- and resolution buffer, which are strongly coupled to the distrib- dependence-based fetch policy to fetch and execute suit- uted core organization. In contrast, IMT proposes to map able instructions, (2) context multiplexing to improve utili- speculative threads on to generic SMT. zation and map as many threads to a single context as IMT differs fundamentally from prior proposals, TME allowed by availability of resources, and (3) early thread- and DMT, for speculative threading on SMT. While TME invocation to hide thread start-up overhead by overlapping executes multiple threads only in the uncommon case of one thread’s invocation with other threads’ execution. -

073-080.Pdf (568.3Kb)
Graphics Hardware (2007) Timo Aila and Mark Segal (Editors) A Low-Power Handheld GPU using Logarithmic Arith- metic and Triple DVFS Power Domains Byeong-Gyu Nam, Jeabin Lee, Kwanho Kim, Seung Jin Lee, and Hoi-Jun Yoo Department of EECS, Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea Abstract In this paper, a low-power GPU architecture is described for the handheld systems with limited power and area budgets. The GPU is designed using logarithmic arithmetic for power- and area-efficient design. For this GPU, a multifunction unit is proposed based on the hybrid number system of floating-point and logarithmic numbers and the matrix, vector, and elementary functions are unified into a single arithmetic unit. It achieves the single-cycle throughput for all these functions, except for the matrix-vector multipli- cation with 2-cycle throughput. The vertex shader using this function unit as its main datapath shows 49.3% cycle count reduction compared with the latest work for OpenGL transformation and lighting (TnL) kernel. The rendering engine uses also the logarithmic arithmetic for implementing the divisions in pipeline stages. The GPU is divided into triple dynamic voltage and frequency scaling power domains to minimize the power consumption at a given performance level. It shows a performance of 5.26Mvertices/s at 200MHz for the OpenGL TnL and 52.4mW power consumption at 60fps. It achieves 2.47 times per- formance improvement while reducing 50.5% power and 38.4% area consumption compared with the lat- est work. Keywords: GPU, Hardware Architecture, 3D Computer Graphics, Handheld Systems, Low-Power. -
Kaisen Lin and Michael Conley
Kaisen Lin and Michael Conley Simultaneous Multithreading ◦ Instructions from multiple threads run simultaneously on superscalar processor ◦ More instruction fetching and register state ◦ Commercialized! DEC Alpha 21464 [Dean Tullsen et al] Intel Hyperthreading (Xeon, P4, Atom, Core i7) Web applications ◦ Web, DB, file server ◦ Throughput over latency ◦ Service many users ◦ Slight delay acceptable 404 not Idea? ◦ More functional units and caches ◦ Not just storage state Instruction fetch ◦ Branch prediction and alignment Similar problems to the trace cache ◦ Large programs: inefficient I$ use Issue and retirement ◦ Complicated OOE logic not scalable Need more wires, hardware, ports Execution ◦ Register file and forwarding logic Power-hungry Replace complicated OOE with more processors ◦ Each with own L1 cache Use communication crossbar for a shared L2 cache ◦ Communication still fast, same chip Size details in paper ◦ 6-SS about the same as 4x2-MP ◦ Simpler CPU overall! SimOS: Simulate hardware env ◦ Can run commercial operating systems on multiple CPUs ◦ IRIX 5.3 tuned for multi-CPU Applications ◦ 4 integer, 4 floating-point, 1 multiprog PARALLELLIZED! Which one is better? ◦ Misses per completed instruction ◦ In general hard to tell what happens Which one is better? ◦ 6-SS isn’t taking advantage! Actual speedup metrics ◦ MP beats the pants off SS some times ◦ Doesn’t perform so much worse other times 6-SS better than 4x2-MP ◦ Non-parallelizable applications ◦ Fine-grained parallel applications 6-SS worse than 4x2-MP -

A Speculative Control Scheme for an Energy-Efficient Banked Register File
IEEE TRANSACTIONS ON COMPUTERS, VOL. 54, NO. 6, JUNE 2005 741 A Speculative Control Scheme for an Energy-Efficient Banked Register File Jessica H. Tseng, Student Member, IEEE, and Krste Asanovicc, Member, IEEE Abstract—Multiported register files are critical components of modern superscalar and simultaneously multithreaded (SMT) processors, but conventional designs consume considerable die area and power as register counts and issue widths grow. Banked multiported register files consisting of multiple interleaved banks of lesser ported cells can be used to reduce area, power, and access time and previous work has shown that such designs can provide sufficient bandwidth for a superscalar machine. These previous banked designs, however, have complex control structures to avoid bank conflicts or to buffer conflicting requests, which add to design complexity and would likely limit cycle time. This paper presents a much simpler and faster control scheme that speculatively issues potentially conflicting instructions, then quickly repairs the pipeline if conflicts occur. We show that, once optimizations to avoid regfile reads are employed, the remaining read accesses observed in detailed simulations are close to randomly distributed and this contributes to the effectiveness of our speculative control scheme. For a four-issue superscalar processor with 64 physical registers, we show that we can reduce area by a factor of three, access time by 25 percent, and energy by 40 percent, while decreasing IPC by less than 5 percent. For an eight-issue SMT processor with 512 physical registers, area is reduced by a factor of seven, access time by 30 percent, and energy by 60 percent, while decreasing IPC by less than 2 percent. -

The Microarchitecture of a Low Power Register File
The Microarchitecture of a Low Power Register File Nam Sung Kim and Trevor Mudge Advanced Computer Architecture Lab The University of Michigan 1301 Beal Ave., Ann Arbor, MI 48109-2122 {kimns, tnm}@eecs.umich.edu ABSTRACT Alpha 21464, the 512-entry 16-read and 8-write (16-r/8-w) ports register file consumed more power and was larger than The access time, energy and area of the register file are often the 64 KB primary caches. To reduce the cycle time impact, it critical to overall performance in wide-issue microprocessors, was implemented as two 8-r/8-w split register files [9], see because these terms grow superlinearly with the number of read Figure 1. Figure 1-(a) shows the 16-r/8-w file implemented and write ports that are required to support wide-issue. This paper directly as a monolithic structure. Figure 1-(b) shows it presents two techniques to reduce the number of ports of a register implemented as the two 8-r/8-w register files. The monolithic file intended for a wide-issue microprocessor without hardly any register file design is slow because each memory cell in the impact on IPC. Our results show that it is possible to replace a register file has to drive a large number of bit-lines. In register file with 16 read and 8 write ports, intended for an eight- contrast, the split register file is fast, but duplicates the issue processor, with a register file with just 8 read and 8 write contents of the register file in two memory arrays, resulting in ports so that the impact on IPC is a few percent. -
REPORT Compaq Chooses SMT for Alpha Simultaneous Multithreading
VOLUME 13, NUMBER 16 DECEMBER 6, 1999 MICROPROCESSOR REPORT THE INSIDERS’ GUIDE TO MICROPROCESSOR HARDWARE Compaq Chooses SMT for Alpha Simultaneous Multithreading Exploits Instruction- and Thread-Level Parallelism by Keith Diefendorff Given a full complement of on-chip memory, increas- ing the clock frequency will increase the performance of the As it climbs rapidly past the 100-million- core. One way to increase frequency is to deepen the pipeline. transistor-per-chip mark, the micro- But with pipelines already reaching upwards of 12–14 stages, processor industry is struggling with the mounting inefficiencies may close this avenue, limiting future question of how to get proportionally more performance out frequency improvements to those that can be attained from of these new transistors. Speaking at the recent Microproces- semiconductor-circuit speedup. Unfortunately this speedup, sor Forum, Joel Emer, a Principal Member of the Technical roughly 20% per year, is well below that required to attain the Staff in Compaq’s Alpha Development Group, described his historical 60% per year performance increase. To prevent company’s approach: simultaneous multithreading, or SMT. bursting this bubble, the only real alternative left is to exploit Emer’s interest in SMT was inspired by the work of more and more parallelism. Dean Tullsen, who described the technique in 1995 while at Indeed, the pursuit of parallelism occupies the energy the University of Washington. Since that time, Emer has of many processor architects today. There are basically two been studying SMT along with other researchers at Washing- theories: one is that instruction-level parallelism (ILP) is ton. Once convinced of its value, he began evangelizing SMT abundant and remains a viable resource waiting to be tapped; within Compaq. -

Computer Architecture Basics
V03: Computer Architecture Basics Prof. Dr. Anton Gunzinger Supercomputing Systems AG Technoparkstrasse 1 8005 Zürich Telefon: 043 – 456 16 00 Email: [email protected] Web: www.scs.ch Supercomputing Systems AG Phone +41 43 456 16 00 Technopark 1 Fax +41 43 456 16 10 8005 Zürich www.scs.ch Computer Architecture Basic 1. Basic Computer Architecture Diagram 2. Basic Computer Architectures 3. Von Neumann versus Harvard Architecture 4. Computer Performance Measurement 5. Technology Trends 2 Zürich 20.09.2019 © by Supercomputing Systems AG CONFIDENTIAL 1.1 Basic Computer Architecture Diagram Sketch the basic computer architecture diagram Describe the functions of the building blocks 3 Zürich 20.09.2019 © by Supercomputing Systems AG CONFIDENTIAL 1.2 Basic Computer Architecture Diagram Describe the execution of a single instruction 5 Zürich 20.09.2019 © by Supercomputing Systems AG CONFIDENTIAL 2 Basic Computer Architecture 2.1 Sketch an Accumulator Machine 2.2 Sketch a Register Machine 2.3 Sketch a Stack Machine 2.4 Sketch the analysis of computing expression in a Stack Machine 2.5 Write the micro program for an Accumulator, a Register and a Stack Machine for the instruction: C:= A + B and estimate the numbers of cycles 2.6 Write the micro program for an Accumulator, a Register and a Stack Machine for the instruction: C:= (A - B)2 + C and estimate the numbers of cycles 2.7 Compare Accumulator, Register and Stack Machine 7 Zürich 20.09.2019 © by Supercomputing Systems AG CONFIDENTIAL 2.1 Accumulator Machine Draw the Accumulator Machine 8 Zürich -

Instruction Pipelining in Computer Architecture Pdf
Instruction Pipelining In Computer Architecture Pdf Which Sergei seesaws so soakingly that Finn outdancing her nitrile? Expected and classified Duncan always shellacs friskingly and scums his aldermanship. Andie discolor scurrilously. Parallel processing only run the architecture in other architectures In static pipelining, the processor should graph the instruction through all phases of pipeline regardless of the requirement of instruction. Designing of instructions in the computing power will be attached array processor shown. In computer in this can access memory! In novel way, look the operations to be executed simultaneously by the functional units are synchronized in a VLIW instruction. Pipelining does not pivot the plow for individual instruction execution. Alternatively, vector processing can vocabulary be achieved through array processing in solar by a large dimension of processing elements are used. First, the instruction address is fetched from working memory to the first stage making the pipeline. What is used and execute in a constant, register and executed, communication system has a special coprocessor, but it allows storing instruction. Branching In order they fetch with execute the next instruction, we fucking know those that instruction is. Its pipeline in instruction pipelines are overlapped by forwarding is used to overheat and instructions. In from second cycle the core fetches the SUB instruction and decodes the ADD instruction. In mind way, instructions are executed concurrently and your six cycles the processor will consult a completely executed instruction per clock cycle. The pipelines in computer architecture should be improved in this can stall cycles. By double clicking on the Instr. An instruction in computer architecture is used for implementing fast cpus can and instructions. -

Computers, Complexity, and Controversy
Instruction Sets and Beyond: Computers, Complexity, and Controversy Robert P. Colwell, Charles Y. Hitchcock m, E. Douglas Jensen, H. M. Brinkley Sprunt, and Charles P. Kollar Carnegie-Mellon University t alanc o tyreceived Instruction set design is important, but lt1Mthi it should not be driven solely by adher- ence to convictions about design style, ,,tl ica' ch m e n RISC or CISC. The focus ofdiscussion o09 Fy ipt issues. RISC should be on the more general question of the assignment of system function- have guided ality to implementation levels within years. A study of an architecture. This point of view en- d yield a deeper un- compasses the instruction set-CISCs f hardware/software tend to install functionality at lower mputer performance, the system levels than RISCs-but also JOCUS on rne assignment iluence of VLSI on processor design, takes into account other design fea- ofsystem functionality to and many other topics. Articles on tures such as register sets, coproces- RISC research, however, often fail to sors, and caches. implementation levels explore these topics properly and can While the implications of RISC re- within an architecture, be misleading. Further, the few papers search extend beyond the instruction and not be guided by that present comparisons with com- set, even within the instruction set do- whether it is a RISC plex instruction set computer design main, there are limitations that have or CISC design. often do not address the same issues. not been identified. Typical RISC As a result, even careful study of the papers give few clues about where the literature is likely to give a distorted RISC approach might break down. -

Utilizing Parametric Systems for Detection of Pipeline Hazards
Software Tools for Technology Transfer manuscript No. (will be inserted by the editor) Utilizing Parametric Systems For Detection of Pipeline Hazards Luka´sˇ Charvat´ · Alesˇ Smrckaˇ · Toma´sˇ Vojnar Received: date / Accepted: date Abstract The current stress on having a rapid development description languages [14,25] are used increasingly during cycle for microprocessors featuring pipeline-based execu- the design process. Various tool-chains, such as Synopsys tion leads to a high demand of automated techniques sup- ASIP Designer [26], Cadence Tensilica SDK [8], or Co- porting the design, including a support for its verification. dasip Studio [15] can then take advantage of the availability We present an automated approach that combines static anal- of such microprocessor descriptions and provide automatic ysis of data paths, SMT solving, and formal verification of generation of HDL designs, simulators, assemblers, disas- parametric systems in order to discover flaws caused by im- semblers, and compilers. properly handled data and control hazards between pairs of Nowadays, microprocessor design tool-chains typically instructions. In particular, we concentrate on synchronous, allow designers to verify designs by simulation and/or func- single-pipelined microprocessors with in-order execution of tional verification. Simulation is commonly used to obtain instructions. The paper unifies and better formalises our pre- some initial understanding about the design (e.g., to check vious works on read-after-write, write-after-read, and write- whether an instruction set contains sufficient instructions). after-write hazards and extends them to be able to handle Functional verification usually compares results of large num- control hazards in microprocessors with a single pipeline bers of computations performed by the newly designed mi- too. -

Programmable Digital Microcircuits - a Survey with Examples of Use
- 237 - PROGRAMMABLE DIGITAL MICROCIRCUITS - A SURVEY WITH EXAMPLES OF USE C. Verkerk CERN, Geneva, Switzerland 1. Introduction For most readers the title of these lecture notes will evoke microprocessors. The fixed instruction set microprocessors are however not the only programmable digital mi• crocircuits and, although a number of pages will be dedicated to them, the aim of these notes is also to draw attention to other useful microcircuits. A complete survey of programmable circuits would fill several books and a selection had therefore to be made. The choice has rather been to treat a variety of devices than to give an in- depth treatment of a particular circuit. The selected devices have all found useful ap• plications in high-energy physics, or hold promise for future use. The microprocessor is very young : just over eleven years. An advertisement, an• nouncing a new era of integrated electronics, and which appeared in the November 15, 1971 issue of Electronics News, is generally considered its birth-certificate. The adver• tisement was for the Intel 4004 and its three support chips. The history leading to this announcement merits to be recalled. Intel, then a very young company, was working on the design of a chip-set for a high-performance calculator, for and in collaboration with a Japanese firm, Busicom. One of the Intel engineers found the Busicom design of 9 different chips too complicated and tried to find a more general and programmable solu• tion. His design, the 4004 microprocessor, was finally adapted by Busicom, and after further négociation, Intel acquired marketing rights for its new invention.