Crosstalk Mitigation Techniques for Digital Subscriber Line Systems: Not Used So
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
How to Choose the Right Cable Category
How to Choose the Right Cable Category Why do I need a different category of cable? Not too long ago, when local area networks were being designed, each work area outlet typically consisted of one Category 3 circuit for voice and one Category 5e circuit for data. Category 3 cables consisted of four loosely twisted pairs of copper conductor under an overall jacket and were tested to 16 megahertz. Category 5e cables, on the other hand, had its four pairs more tightly twisted than the Category 3 and were tested up to 100 megahertz. The design allowed for voice on one circuit and data on the other. As network equipment data rates increased and more network devices were finding their way onto the network, this design quickly became obsolete. Companies wisely began installing all Category 5e circuits with often three or more circuits per work area outlet. Often, all circuits, including voice, were fed off of patch panels. This design allowed information technology managers to use any circuit as either a voice or a data circuit. Overbuilding the system upfront, though it added costs to the original project, ultimately saved money since future cable additions or cable upgrades would cost significantly more after construction than during the original construction phase. By installing all Category 5e cables, they knew their infrastructure would accommodate all their network needs for a number of years and that they would be ready for the next generation of network technology coming down the road. Though a Category 5e cable infrastructure will safely accommodate the widely used 10 and 100 megabit-per-second (Mbits/sec) Ethernet protocols, 10Base-T and 100Base-T respectively, it may not satisfy the needs of the higher performing Ethernet protocol, gigabit Ethernet (1000 Mbits/sec), also referred to as 1000Base-T. -

The Transport Layer: Tutorial and Survey SAMI IREN and PAUL D
The Transport Layer: Tutorial and Survey SAMI IREN and PAUL D. AMER University of Delaware AND PHILLIP T. CONRAD Temple University Transport layer protocols provide for end-to-end communication between two or more hosts. This paper presents a tutorial on transport layer concepts and terminology, and a survey of transport layer services and protocols. The transport layer protocol TCP is used as a reference point, and compared and contrasted with nineteen other protocols designed over the past two decades. The service and protocol features of twelve of the most important protocols are summarized in both text and tables. Categories and Subject Descriptors: C.2.0 [Computer-Communication Networks]: General—Data communications; Open System Interconnection Reference Model (OSI); C.2.1 [Computer-Communication Networks]: Network Architecture and Design—Network communications; Packet-switching networks; Store and forward networks; C.2.2 [Computer-Communication Networks]: Network Protocols; Protocol architecture (OSI model); C.2.5 [Computer- Communication Networks]: Local and Wide-Area Networks General Terms: Networks Additional Key Words and Phrases: Congestion control, flow control, transport protocol, transport service, TCP/IP 1. INTRODUCTION work of routers, bridges, and communi- cation links that moves information be- In the OSI 7-layer Reference Model, the tween hosts. A good transport layer transport layer is the lowest layer that service (or simply, transport service) al- operates on an end-to-end basis be- lows applications to use a standard set tween two or more communicating of primitives and run on a variety of hosts. This layer lies at the boundary networks without worrying about differ- between these hosts and an internet- ent network interfaces and reliabilities. -
Moving to Ipv6(PDF)
1 Chicago, IL 9/1/15 2 Moving to IPv6 Mark Kosters, Chief Technology Officer With some help from Geoff Huston 3 The Amazing Success of the Internet • 2.92 billion users! • 4.5 online hours per day per user! • 5.5% of GDP for G-20 countries Just about anything about the Internet Time 3 4 Success-Disaster 5 The Original IPv6 Plan - 1995 Size of the Internet IPv6 Deployment IPv6 Transition – Dual Stack IPv4 Pool Size Time 6 The Revised IPv6 Plan - 2005 IPv4 Pool Size Size of the Internet IPv6 Transition – Dual Stack IPv6 Deployment 2004 2006 2008 2010 2012 Date 7 Oops! We were meant to have completed the transition to IPv6 BEFORE we completely exhausted the supply channels of IPv4 addresses! 8 Today’s Plan IPv4 Pool Size Today Size of the Internet ? IPv6 Transition IPv6 Deployment 0.8% Time 9 Transition... The downside of an end-to-end architecture: – There is no backwards compatibility across protocol families – A V6-only host cannot communicate with a V4-only host We have been forced to undertake a Dual Stack transition: – Provision the entire network with both IPv4 AND IPv6 – In Dual Stack, hosts configure the hosts’ applications to prefer IPv6 to IPv4 – When the traffic volumes of IPv4 dwindle to insignificant levels, then it’s possible to shut down support for IPv4 10 Dual Stack Transition ... We did not appreciate the operational problems with this dual stack plan while it was just a paper exercise: • The combination of an end host preference for IPv6 and a disconnected set of IPv6 “islands” created operational problems – Protocol -

Routing Loop Attacks Using Ipv6 Tunnels
Routing Loop Attacks using IPv6 Tunnels Gabi Nakibly Michael Arov National EW Research & Simulation Center Rafael – Advanced Defense Systems Haifa, Israel {gabin,marov}@rafael.co.il Abstract—IPv6 is the future network layer protocol for A tunnel in which the end points’ routing tables need the Internet. Since it is not compatible with its prede- to be explicitly configured is called a configured tunnel. cessor, some interoperability mechanisms were designed. Tunnels of this type do not scale well, since every end An important category of these mechanisms is automatic tunnels, which enable IPv6 communication over an IPv4 point must be reconfigured as peers join or leave the tun- network without prior configuration. This category includes nel. To alleviate this scalability problem, another type of ISATAP, 6to4 and Teredo. We present a novel class of tunnels was introduced – automatic tunnels. In automatic attacks that exploit vulnerabilities in these tunnels. These tunnels the egress entity’s IPv4 address is computationally attacks take advantage of inconsistencies between a tunnel’s derived from the destination IPv6 address. This feature overlay IPv6 routing state and the native IPv6 routing state. The attacks form routing loops which can be abused as a eliminates the need to keep an explicit routing table at vehicle for traffic amplification to facilitate DoS attacks. the tunnel’s end points. In particular, the end points do We exhibit five attacks of this class. One of the presented not have to be updated as peers join and leave the tunnel. attacks can DoS a Teredo server using a single packet. The In fact, the end points of an automatic tunnel do not exploited vulnerabilities are embedded in the design of the know which other end points are currently part of the tunnels; hence any implementation of these tunnels may be vulnerable. -

Lecture 11: PKI, SSL and VPN Information Security – Theory Vs
Lecture 11: PKI, SSL and VPN Information Security – Theory vs. Reality 0368-4474-01, Winter 2011 Yoav Nir ©2011 Check Point Software Technologies Ltd. | [Restricted] ONLY for designated groups and individuals What is VPN ° VPN stands for Virtual Private Network ° A private network is pretty obvious – An Ethernet LAN running in my building – Wifi with access control – A locked door and thick walls can be access control – An optical fiber running between two buildings ©2011 Check Point Software Technologies Ltd. 2 What is a VPN ° What is a non-private network? – Obviously, someone else’s network. ° Obvious example: the Internet. ° The Internet is pretty fast, and really cheap. ° What do I do if I have offices in several cities – And people working from home – And sales people working from who knows where ° We could use the Internet, but… – People could see my data – People could modify my messsages – People could pretend to be other people ©2011 Check Point Software Technologies Ltd. 3 What is a VPN ° I could run my own cables around the world. ° I could buy an MPLS connection from a local telco – Bezeq would love to sell me one. They call it IPVPN, and it’s pretty much a switched link just for my company – But I can’t get that to the home or mobile users – And it’s mediocre (but consistent) speed – And Bezeq can still do whatever it wants – And it’s really expensive – The incremental cost of using the Internet is zero ° A virtual private network combines the relative low-cost of using the Internet with the privacy of a leased line. -

Modeling and Estimation of Crosstalk Across a Channel with Multiple, Non-Parallel Coupling and Crossings of Multiple Aggressors in Practical PCBS
Scholars' Mine Doctoral Dissertations Student Theses and Dissertations Fall 2014 Modeling and estimation of crosstalk across a channel with multiple, non-parallel coupling and crossings of multiple aggressors in practical PCBS Arun Reddy Chada Follow this and additional works at: https://scholarsmine.mst.edu/doctoral_dissertations Part of the Electrical and Computer Engineering Commons Department: Electrical and Computer Engineering Recommended Citation Chada, Arun Reddy, "Modeling and estimation of crosstalk across a channel with multiple, non-parallel coupling and crossings of multiple aggressors in practical PCBS" (2014). Doctoral Dissertations. 2338. https://scholarsmine.mst.edu/doctoral_dissertations/2338 This thesis is brought to you by Scholars' Mine, a service of the Missouri S&T Library and Learning Resources. This work is protected by U. S. Copyright Law. Unauthorized use including reproduction for redistribution requires the permission of the copyright holder. For more information, please contact [email protected]. MODELING AND ESTIMATION OF CROSSTALK ACROSS A CHANNEL WITH MULTIPLE, NON-PARALLEL COUPLING AND CROSSINGS OF MULTIPLE AGGRESSORS IN PRACTICAL PCBS by ARUN REDDY CHADA A DISSERTATION Presented to the Faculty of the Graduate School of the MISSOURI UNIVERSITY OF SCIENCE AND TECHNOLOGY In Partial Fulfillment of the Requirements for the Degree DOCTOR OF PHILOSOPHY in ELECTRICAL ENGINEERING 2014 Approved Jun Fan, Advisor James L. Drewniak Daryl Beetner Richard E. Dubroff Bhyrav Mutnury 2014 ARUN REDDY CHADA All Rights Reserved iii ABSTRACT In Section 1, the focus is on alleviating the modeling challenges by breaking the overall geometry into small, unique sections and using either a Full-Wave or fast equivalent per-unit-length (Eq. PUL) resistance, inductance, conductance, capacitance (RLGC) method or a partial element equivalent circuit (PEEC) for the broadside coupled traces that cross at an angle. -
Ipsec and IKE Administration Guide
IPsec and IKE Administration Guide Sun Microsystems, Inc. 4150 Network Circle Santa Clara, CA 95054 U.S.A. Part No: 816–7264–10 April 2003 Copyright 2003 Sun Microsystems, Inc. 4150 Network Circle, Santa Clara, CA 95054 U.S.A. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution, and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, docs.sun.com, AnswerBook, AnswerBook2, SunOS, Sun ONE Certificate Server, and Solaris are trademarks, registered trademarks, or service marks of Sun Microsystems, Inc. in the U.S. and other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. in the U.S. and other countries. Products bearing SPARC trademarks are based upon an architecture developed by Sun Microsystems, Inc. The OPEN LOOK and Sun™ Graphical User Interface was developed by Sun Microsystems, Inc. for its users and licensees. Sun acknowledges the pioneering efforts of Xerox in researching and developing the concept of visual or graphical user interfaces for the computer industry. Sun holds a non-exclusive license from Xerox to the Xerox Graphical User Interface, which license also covers Sun’s licensees who implement OPEN LOOK GUIs and otherwise comply with Sun’s written license agreements. -

Federal Communications Commission FCC 98-221 Federal
Federal Communications Commission FCC 98-221 Federal Communications Commission Washington, D.C. 20554 In the Matter of ) ) 1998 Biennial Regulatory Review -- ) Modifications to Signal Power ) Limitations Contained in Part 68 ) CC Docket No. 98-163 of the Commission's Rules ) ) ) ) ) NOTICE OF PROPOSED RULEMAKING Adopted: September 8, 1998 Released: September 16, 1998 Comment Date: 30 days from date of publication in the Federal Register Reply Comment Date: 45 days from date of publication in the Federal Register By the Commission: Commissioner Furchtgott-Roth issuing a separate statement. I. INTRODUCTION 1. In this proceeding, we seek to make it possible for customers to download data from the Internet more quickly. Our proposal, if adopted, could somewhat improve the transmission rates experienced by persons using high speed digital information products, such as 56 kilobits per second (kbps) modems, to download data from the Internet. Currently, our rules limiting the amount of signal power that can be transmitted over telephone lines prohibit such products from operating at their full potential. We believe these signal power limitations can be relaxed without causing interference or other technical problems. Therefore, we propose to relax the signal power limitations contained in Part 68 of our rules and explore the benefits and harms, if any, that may result from this change. This change would allow Pulse Code Modulation (PCM) modems, which are used by Internet Service Providers (ISPs) and other online information service providers to transmit data to consumers, to operate at higher signal powers. This modification will allow ISPs and other online information service providers to transmit data at moderately higher speeds to end-users. -

Zerox Algorithms with Free Crosstalk in Optical Multistage Interconnection Network
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 4, No. 2, 2013 ZeroX Algorithms with Free crosstalk in Optical Multistage Interconnection Network M.A.Al-Shabi Department of Information Technology, College of Computer, Qassim University, KSA. Abstract— Multistage interconnection networks (MINs) have is on the time dilation approach to solve the optical crosstalk been proposed as interconnecting structures in various types of problem in the omega networks, a class of self-routable communication applications ranging from parallel systems, networks, which is topologically equivalent to the baseline, switching architectures, to multicore systems and advances. butterfly, cube networks et[10]. The time dilation approach Optical technologies have drawn the interest for optical solves the crosstalk problem by ensuring that only one signal is implementation in MINs to achieve high bandwidth capacity at allowed to pass through each switching element at a given time the rate of terabits per second. Crosstalk is the major problem in the network [11][12]. Typical MINs consist of N inputs, N with optical interconnections; it not only degrades the outputs and n stages with n=log N. Each stage is numbered performance of network but also disturbs the path of from 0 to (n-1), from left to right and has N/2 Switching communication signals. To avoid crosstalk in Optical MINs many Elements (SE). Each SE has two inputs and two outputs algorithms have been proposed by many researchers and some of the researchers suppose some solution to improve Zero connected in a certain pattern. Algorithm. This paper will be illustrated that is no any crosstalk The critical challenges with optical multistage appears in Zero based algorithms (ZeroX, ZeroY and ZeroXY) in interconnections are optical loss, path dependent loss and using refine and unique case functions. -
An Introduction to the Identifier-Locator Network Protocol (ILNP)
An Introduction to the Identifier-Locator Network Protocol (ILNP) Presented by Joel Halpern Material prepared by Saleem N. Bhatti & Ran Atkinson https://ilnp.cs.st-andrews.ac.uk/ IETF102, Montreal, CA. (C) Saleem Bhatti, 21 June 2018. 1 Thanks! • Joel Halpern: presenting today! • Ran Atkinson: co-conspirator. • Students at the University of St Andrews: • Dr Ditchaphong Phoomikiatissak (Linux) • Dr Bruce Simpson (FreeBSD, Cisco) • Khawar Shezhad (DNS/Linux, Verisign) • Ryo Yanagida (Linux, Time Warner) • … many other students on sub-projects … • IRTF (Routing RG, now concluded) • Discussions on various email lists. IETF102, Montreal, CA. (C) Saleem Bhatti, 21 June 2018. 2 Background to Identifier-Locator IETF102, Montreal, CA. (C) Saleem Bhatti, 21 June 2018. 3 “IP addresses considered harmful” • “IP addresses considered harmful” Brian E. Carpenter ACM SIGCOMM CCR, vol. 44, issue 2, Apr 2014 http://dl.acm.org/citation.cfm?id=2602215 http://dx.doi.org/10.1145/2602204.2602215 • Abstract This note describes how the Internet has got itself into deep trouble by over-reliance on IP addresses and discusses some possible ways forward. IETF102, Montreal, CA. (C) Saleem Bhatti, 21 June 2018. 4 RFC2104 (I), IAB, Feb 1997 • RFC2104, “IPv4 Address Behaviour Today”. • Ideal behaviour of Identifiers and Locators: Identifiers should be assigned at birth, never change, and never be re-used. Locators should describe the host's position in the network's topology, and should change whenever the topology changes. Unfortunately neither of the these ideals are met by IPv4 addresses. IETF102, Montreal, CA. (C) Saleem Bhatti, 21 June 2018. 5 RFC6115 (I), Feb 2011 • RFC6115, “Recommendation for a Routing Architecture”. -
WP Demystifyingcble B 5/19/11 9:49 AM Page 2
WP_DeMystifyingCble_F (US)_WP_DeMystifyingCble_B 5/19/11 9:49 AM Page 2 FROM 5e TO 7A De-Mystifying Cabling Specifications – From 5e to 7A tructured cabling standards specify generic installation and design topologies that are characterized by a S“category” or “class” of transmission performance. These cabling standards are subsequently referenced in applications standards, developed by committees such as IEEE and ATM, as a minimum level of performance necessary to ensure application operation. There are many advantages to be realized by specifying standards-compliant structured cabling. These include the assurance of applications operation, the flexibility of cable and connectivity choices that are backward compatible and interoperable, and a structured cabling design and topology that is universally recognized by cabling professionals responsible for managing cabling additions, upgrades, and changes. CONNECTING THE WORLD TO A HIGHER STANDARD WWW. SIEMON. COM WP_DeMystifyingCble_F (US)_WP_DeMystifyingCble_B 5/19/11 9:49 AM Page 3 FROM 5e TO 7A The Telecommunications Industry Association (TIA) and International Standard for Organization (ISO) commit- tees are the leaders in the development of structured cabling standards. Committee members work hand-in-hand with applications development committees to ensure that new grades of cabling will support the latest innovations in signal transmission technology. TIA Standards are often specified by North American end-users, while ISO Standards are more commonly referred to in the global marketplace. In addition to TIA and ISO, there are often regional cabling standards groups such as JSA/JSI (Japanese Standards Association), CSA (Canadian Standards Association), and CENELEC (European Committee for Electrotechnical Standardization) developing local specifications. These regional cabling standards groups contribute actively to their country’s ISO technical advisory committees and the contents of their Standards are usually very much in harmony with TIA and ISO requirements. -
Secure Socket Layer Transport Layer Security
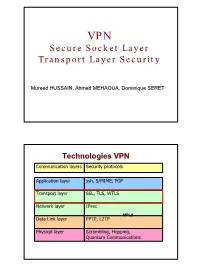
VPN Secure Socket Layer Transport Layer Security Mureed HUSSAIN, Ahmed MEHAOUA, Dominique SERET Technologies VPN Communication layers Security protocols Application layer ssh, S/MIME, PGP Transport layer SSL, TLS, WTLS Network layer IPsec MPLS Data Link layer PPTP, L2TP Physical layer Scrambling, Hopping, Quantum Communications 1 Agenda • Introduction – Motivation, evolution, standardization – Applications • SSL Protocol – SSL phases and services – Sessions and connections – SSL protocols and layers • SSL Handshake protocol • SSL Record protocol / layer • SSL solutions and products • Conclusion Sécurisation des échanges • Pour sécuriser les échanges ayant lieu sur le réseau Internet, il existe plusieurs approches : - niveau applicatif (PGP) - niveau réseau (protocole IPsec) - niveau physique (boîtiers chiffrant). • TLS/SSL vise à sécuriser les échanges au niveau de la couche Transport. • Application typique : sécurisation du Web 2 Transport Layer Security • Advantages – Does not require enhancement to each application – NAT friendly – Firewall Friendly • Disadvantages – Embedded in the application stack (some mis-implementation) – Protocol specific --> need to duplicated for each transport protocol – Need to maintain context for connection (not currently implemented for UDP) – Doesn’t protect IP adresses & headers Security-Sensitive Web Applications • Online banking • Online purchases, auctions, payments • Restricted website access • Software download • Web-based Email • Requirements – Authentication: Of server, of client, or (usually)