Complete System Power Estimation Using Processor Performance Events W
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SIMD Extensions
SIMD Extensions PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 12 May 2012 17:14:46 UTC Contents Articles SIMD 1 MMX (instruction set) 6 3DNow! 8 Streaming SIMD Extensions 12 SSE2 16 SSE3 18 SSSE3 20 SSE4 22 SSE5 26 Advanced Vector Extensions 28 CVT16 instruction set 31 XOP instruction set 31 References Article Sources and Contributors 33 Image Sources, Licenses and Contributors 34 Article Licenses License 35 SIMD 1 SIMD Single instruction Multiple instruction Single data SISD MISD Multiple data SIMD MIMD Single instruction, multiple data (SIMD), is a class of parallel computers in Flynn's taxonomy. It describes computers with multiple processing elements that perform the same operation on multiple data simultaneously. Thus, such machines exploit data level parallelism. History The first use of SIMD instructions was in vector supercomputers of the early 1970s such as the CDC Star-100 and the Texas Instruments ASC, which could operate on a vector of data with a single instruction. Vector processing was especially popularized by Cray in the 1970s and 1980s. Vector-processing architectures are now considered separate from SIMD machines, based on the fact that vector machines processed the vectors one word at a time through pipelined processors (though still based on a single instruction), whereas modern SIMD machines process all elements of the vector simultaneously.[1] The first era of modern SIMD machines was characterized by massively parallel processing-style supercomputers such as the Thinking Machines CM-1 and CM-2. These machines had many limited-functionality processors that would work in parallel. -
This Is Your Presentation Title
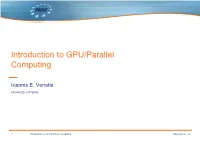
Introduction to GPU/Parallel Computing Ioannis E. Venetis University of Patras 1 Introduction to GPU/Parallel Computing www.prace-ri.eu Introduction to High Performance Systems 2 Introduction to GPU/Parallel Computing www.prace-ri.eu Wait, what? Aren’t we here to talk about GPUs? And how to program them with CUDA? Yes, but we need to understand their place and their purpose in modern High Performance Systems This will make it clear when it is beneficial to use them 3 Introduction to GPU/Parallel Computing www.prace-ri.eu Top 500 (June 2017) CPU Accel. Rmax Rpeak Power Rank Site System Cores Cores (TFlop/s) (TFlop/s) (kW) National Sunway TaihuLight - Sunway MPP, Supercomputing Center Sunway SW26010 260C 1.45GHz, 1 10.649.600 - 93.014,6 125.435,9 15.371 in Wuxi Sunway China NRCPC National Super Tianhe-2 (MilkyWay-2) - TH-IVB-FEP Computer Center in Cluster, Intel Xeon E5-2692 12C 2 Guangzhou 2.200GHz, TH Express-2, Intel Xeon 3.120.000 2.736.000 33.862,7 54.902,4 17.808 China Phi 31S1P NUDT Swiss National Piz Daint - Cray XC50, Xeon E5- Supercomputing Centre 2690v3 12C 2.6GHz, Aries interconnect 3 361.760 297.920 19.590,0 25.326,3 2.272 (CSCS) , NVIDIA Tesla P100 Cray Inc. DOE/SC/Oak Ridge Titan - Cray XK7 , Opteron 6274 16C National Laboratory 2.200GHz, Cray Gemini interconnect, 4 560.640 261.632 17.590,0 27.112,5 8.209 United States NVIDIA K20x Cray Inc. DOE/NNSA/LLNL Sequoia - BlueGene/Q, Power BQC 5 United States 16C 1.60 GHz, Custom 1.572.864 - 17.173,2 20.132,7 7.890 4 Introduction to GPU/ParallelIBM Computing www.prace-ri.eu How do -

A GPU Approach to Fortran Legacy Systems
A GPU Approach to Fortran Legacy Systems Mariano M¶endez,Fernando G. Tinetti¤ III-LIDI, Facultad de Inform¶atica,UNLP 50 y 120, 1900, La Plata Argentina Technical Report PLA-001-2012y October 2012 Abstract A large number of Fortran legacy programs are still running in production environments, and most of these applications are running sequentially. Multi- and Many- core architectures are established as (almost) the only processing hardware available, and new programming techniques that take advantage of these architectures are necessary. In this report, we will explore the impact of applying some of these techniques into legacy Fortran source code. Furthermore, we have measured the impact in the program performance introduced by each technique. The OpenACC standard has resulted in one of the most interesting techniques to be used on Fortran Legacy source code that brings speed up while requiring minimum source code changes. 1 Introduction Even though the concept of legacy software systems is widely known among developers, there is not a unique de¯nition about of what a legacy software system is. There are di®erent viewpoints on how to describe a legacy system. Di®erent de¯nitions make di®erent levels of emphasis on di®erent character- istics, e.g.: a) \The main thing that distinguishes legacy code from non-legacy code is tests, or rather a lack of tests" [15], b) \Legacy Software is critical software that cannot be modi¯ed e±ciently" [10], c) \Any information system that signi¯cantly resists modi¯cation and evolution to meet new and constantly changing business requirements." [7], d) \large software systems that we don't know how to cope with but that are vital to our organization. -

NVIDIA's Fermi: the First Complete GPU Computing Architecture
NVIDIA’s Fermi: The First Complete GPU Computing Architecture A white paper by Peter N. Glaskowsky Prepared under contract with NVIDIA Corporation Copyright © September 2009, Peter N. Glaskowsky Peter N. Glaskowsky is a consulting computer architect, technology analyst, and professional blogger in Silicon Valley. Glaskowsky was the principal system architect of chip startup Montalvo Systems. Earlier, he was Editor in Chief of the award-winning industry newsletter Microprocessor Report. Glaskowsky writes the Speeds and Feeds blog for the CNET Blog Network: http://www.speedsnfeeds.com/ This document is licensed under the Creative Commons Attribution ShareAlike 3.0 License. In short: you are free to share and make derivative works of the file under the conditions that you appropriately attribute it, and that you distribute it only under a license identical to this one. http://creativecommons.org/licenses/by-sa/3.0/ Company and product names may be trademarks of the respective companies with which they are associated. 2 Executive Summary After 38 years of rapid progress, conventional microprocessor technology is beginning to see diminishing returns. The pace of improvement in clock speeds and architectural sophistication is slowing, and while single-threaded performance continues to improve, the focus has shifted to multicore designs. These too are reaching practical limits for personal computing; a quad-core CPU isn’t worth twice the price of a dual-core, and chips with even higher core counts aren’t likely to be a major driver of value in future PCs. CPUs will never go away, but GPUs are assuming a more prominent role in PC system architecture. -

Comparative Study of High Performance Software Rasterization Techniques
MATHEMATICA MONTISNIGRI Vol XLVII (2020) COMPARATIVE STUDY OF HIGH PERFORMANCE SOFTWARE RASTERIZATION TECHNIQUES V. F. FROLOV1;2, V. A. GALAKTIONOV1;∗ AND B. H. BARLADYAN1 1Keldysh Institute of Applied Mathematics of RAS, Miusskaya Sq. 4, Moscow, Russia, 125047 2Lomonosov Moscow State University, GSP-1, Leninskie Gory, Moscow, 119991, Russian Federation *Corresponding author. E-mail: [email protected], web page: http://keldysh.ru/ DOI: 10.20948/mathmontis-2020-47-13 Abstract. This paper provides a comparative study and performance analysis of different rasterization algorithms and approaches. Unlike many other papers, we don't focus on rasterization itself, but investigate complete graphics pipeline with 3D transfor- mations, Z-buffer, perspective correction and texturing that, on the one hand, allow us to implement a useful subset of OpenGL functionality and, on the other hand, consider various bottlenecks in the graphics pipeline and how different approaches manage them. Our ultimate goal is to find a scalable rasterizer technique that on the one hand effectively uses current CPUs and on the other hand is accelerating with the extensive development of hardware. We explore the capabilities of scan-line and half-space algorithms raster- ization, investigate different memory layout for frame buffer data, study the possibility of instruction-level and thread-level parallelism to be applied. We also study relative efficiency of different CPU architectures (in-order CPUs vs out-of-order CPUs) for the graphics pipeline implementation and tested our solution with x64, ARMv7 and ARMv8 instruction sets. We were able to propose an approach that could outperform highly op- timized OpenSWR rasterizer for small triangles. -

Ultrasound Imaging Augmented 3D Flow Reconstruction and Computational Fluid Dynamics Simulation
Imperial College of Science, Technology and Medicine Royal School of Mines Department of Bioengineering Ultrasound Imaging Augmented 3D Flow Reconstruction and Computational Fluid Dynamics Simulation by Xinhuan Zhou A thesis submitted for the degree of Doctor of Philosophy of Imperial College London October 2019 1 Abstract Abstract Cardiovascular Diseases (CVD), including stroke, coronary/peripheral artery diseases, are currently the leading cause of mortality globally. CVD are usually correlated to abnormal blood flow and vessel wall shear stress, and fast/accurate patient-specific 3D blood flow quantification can provide clinicians/researchers the insights/knowledge for better understanding, prediction, detection and treatment of CVD. Experimental methods including mainly ultrasound (US) Vector Flow Imaging (VFI), and Computational Fluid Dynamics (CFD) are usually employed for blood flow quantification. However current US methods are mainly 1D or 2D, noisy, can only obtain velocities at sparse positions in 3D, and thus have difficulties providing information required for research and clinical diagnosis. On the other hand while CFD is the current standard for 3D blood flow quantification it is usually computationally expensive and suffers from compromised accuracy due to uncertainties in the CFD input, e.g., blood flow boundary/initial condition and vessel geometry. To bridge the current gap between the clinical needs of 3D blood flow quantification and measurement technologies, this thesis aims at: 1) developing a fast and accurate -

Intel Literature Or Obtain Literature Pricing Information in the U.S
LITERATURE To order Intel Literature or obtain literature pricing information in the U.S. and Canada call or write Intel Literature Sales. In Europe and other international locations, please contact your local sales office or distributor. INTEL LITERATURE SALES In the U.S. and Canada P.O. BOX 7641 call toll free Mt. Prospect, IL 60056-7641 (800) 548-4725 CURRENT HANDBOOKS Product line handbooks contain data sheets, application notes, article reprints and other design informa tion. TITLE LITERATURE ORDER NUMBER SET OF 11 HANDBOOKS 231003 (Available in U.S. and Canada only) EMBEDDED APPLICATIONS 270648 8-BIT EMBEDDED CONTROLLERS 270645 16-BIT EMBEDDED CONTROLLERS 270646 16/32-BIT EMBEDDED PROCESSORS 270647 MEMORY 210830 MICROCOMMUNICATIONS 231658 (2 volume set) MICROCOMPUTER SYSTEMS 280407 MICROPROCESSORS 230843 PERIPHERALS 296467 PRODUCT GUIDE 210846 (Overview of Intel's complete product lines) PROGRAMMABLE LOGIC 296083 ADDITIONAL LITERATURE (Not included in handbook set) AUTOMOTIVE SUPPLEMENT 231792 COMPONENTS QUALITY/RELIABILITY HANDBOOK 210997 INTEL PACKAGING OUTLINES AND DIMENSIONS 231369 (Packaging types, number of leads, etc.) INTERNATIONAL LITERATURE GUIDE E00029 LITERATURE PRICE LIST (U.S. and Canada) 210620 (Comprehensive list of current Intel literature) MILITARY 210461 (2 volume set) SYSTEMS QUALITY/RELIABILITY 231762 LlTINCOV/10/89 u.s. and CANADA LITERATURE ORDER FORM NAME: __________________________________________________________ COMPANY: _____________________________________________________ ADDRESS: _____________________________________________________ -

A Mobile 3D Display Processor with a Bandwidth-Saving Subdivider
> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) < 1 A Mobile 3D Display Processor with A Bandwidth-Saving Subdivider Seok-Hoon Kim, Sung-Eui Yoon, Sang-Hye Chung, Young-Jun Kim, Hong-Yun Kim, Kyusik Chung, and Lee-Sup Kim Abstract— A mobile 3D display processor with a subdivider is presented for higher visual quality on handhelds. By combining a subdivision technique with a 3D display, the processor can support viewers see realistic smooth surfaces in the air. However, both the subdivision and the 3D display processes require a high number of memory operations to mobile memory architecture. Therefore, we make efforts to save the bandwidth between the processor and off-chip memory. In the subdivider, we propose a re-computing based depth-first scheme that has much smaller working set than prior works. The proposed scheme achieves about 100:1 bandwidth reduction over the prior subdivision Fig. 1 The memory architecture of handhelds is different methods. Also the designed 3D display engine reduces the from the memory architecture of PCs. All the processors bandwidth to 27% by reordering the operation sequence of the 3D share the same bus and a unified memory which is outside display process. This bandwidth saving translates into reductions the chip. of off-chip access energy and time. Consequently the overall bandwidth of both the subdivision and the 3D display processes is affordable to a commercial mobile bus. In addition to saving significant attentions, because they can support smooth bandwidth, our work provides enough visual quality and surfaces, leading to high-quality rendering. -

H Ll What We Will Cover
Whllhat we will cover Contour Tracking Surface Rendering Direct Volume Rendering Isosurface Rendering Optimizing DVR Pre-Integrated DVR Sp latti ng Unstructured Volume Rendering GPU-based Volume Rendering Rendering using Multi-GPU History of Multi-Processor Rendering 1993 SGI announced the Onyx series of graphics servers the first commercial system with a multi-processor graphics subsystem cost up to a million dollars 3DFx Interactive (1995) introduced the first gaming accelerator called 3DFx Voodoo Graphics The Voodoo Graphics chipset consisted of two chips: the Frame Buffer Interface (FBI) was responsible for the frame buffer and the Texture Mapping Unit (TMU) processed textures. The chipset could scale the performance up by adding more TMUs – up to three TMUs per one FBI. early 1998 3dfx introduced its next chipset , Voodoo2 the first mass product to officially support the option of increasing the performance by uniting two Voodoo2-based graphics cards with SLI (Scan-Line Interleave) technology. the cost of the system was too high 1999 NVIDIA released its new graphics chip TNT2 whose Ultra version could challenge the speed of the Voodoo2 SLI but less expensive. 3DFx Interactive was devoured by NVIDIA in 2000 Voodoo Voodoo 2 SLI Voodoo 5 SLI Rendering Voodoo 5 5500 - Two Single Board SLI History of Multi-Processor Rendering ATI Technologies(1999) MAXX –put two chips on one PCB and make them render different frames simultaneously and then output the frames on the screen alternately. Failed by technical issues (sync and performance problems) NVIDIA SLI(200?) Scalable Link Interface Voodoo2 style dual board implementation 3Dfx SLI was PCI based and has nowhere near the bandwidth of PCIE used by NVIDIA SLI. -
ECE 571 – Advanced Microprocessor-Based Design Lecture 36
ECE 571 { Advanced Microprocessor-Based Design Lecture 36 Vince Weaver http://web.eece.maine.edu/~vweaver [email protected] 4 December 2020 Announcements • Don't forget projects, presentations next week (Wed and Fri) • Final writeup due last day of exams (18th) • Will try to get homeworks graded soon. 1 NVIDIA GPUs Tesla 2006 90-40nm Fermi 2010 40nm/28nm Kepler 2012 28nm Maxwell 2014 28nm Pascal/Volta 2016 16nm/14nm Turing 2018 12nm Ampere 2020 8nm/7nm Hopper 20?? ?? • GeForce { Gaming 2 • Quadro { Workstation • DataCenter 3 Also Read NVIDIA AMPERE GPU ARCHITECTURE blog post https://developer.nvidia.com/blog/nvidia-ampere-architecture-in-depth/ 4 A100 Whitepaper • A100 • Price? From Dell: $15,434.81 (Free shipping) • Ethernet and Infiniband (Mellanox) support? • Asynchronous Copy • HBM, ECC single-error correcting double-error detection (SECDED) 5 Homework Reading #1 NVIDIA Announces the GeForce RTX 30 Series: Ampere For Gaming, Starting With RTX 3080 & RTX 3090 https://www.anandtech.com/show/16057/ nvidia-announces-the-geforce-rtx-30-series-ampere-for-gaming-starting-with-rtx-3080-rtx-3090 September 2020 { by Ryan Smith 6 Background • Ampere Architecture • CUDA compute 8.0 • TSMC 7nm FINFET (A100) • Samspun 8n, Geforce30 7 GeForce RTX 30 • Samsung 8nm process • Gaming performance • Comparison to RTX 20 (Turing based) • RTX 3090 ◦ 10496 cores ◦ 1.7GHz boost clock ◦ 19.5 Gbps GDDR6X, 384 bit, 24GB ◦ Single precision 35.7 TFLOP/s ◦ Tensor (16-bit) 143 TFLOP/s 8 ◦ Ray perf 69 TFLOPs ◦ 350W ◦ 8nm Samsung (smallest non-EUV) ◦ 28 billion transistors ◦ $1500 • GA100 compute(?) TODO • Third generation tensor cores • Ray-tracing cores • A lot of FP32 (shader?) cores • PCIe 4.0 support (first bump 8 years, 32GB/s) • SLI support 9 • What is DirectStorage API? GPU can read disk directly? Why might that be useful? • 1.9x power efficiency? Is that possible? Might be comparing downclocked Ampere to Turing rather than vice-versa • GDDR6X ◦ NVidia and Micron? ◦ multi-level singnaling? ◦ can send 2 bits per clock (PAM4 vs NRZ). -

Appendix C Graphics and Computing Gpus
C APPENDIX Graphics and Computing GPUs John Nickolls Imagination is more Director of Architecture important than NVIDIA knowledge. David Kirk Chief Scientist Albert Einstein On Science, 1930s NVIDIA C.1 Introduction C-3 C.2 GPU System Architectures C-7 C.3 Programming GPUs C-12 C.4 Multithreaded Multiprocessor Architecture C-24 C.5 Parallel Memory System C-36 C.6 Floating-point Arithmetic C-41 C.7 Real Stuff: The NVIDIA GeForce 8800 C-45 C.8 Real Stuff: Mapping Applications to GPUs C-54 C.9 Fallacies and Pitfalls C-70 C.10 Concluding Remarks C-74 C.11 Historical Perspective and Further Reading C-75 C.1 Introduction Th is appendix focuses on the GPU—the ubiquitous graphics processing unit graphics processing in every PC, laptop, desktop computer, and workstation. In its most basic form, unit (GPU) A processor the GPU generates 2D and 3D graphics, images, and video that enable window- optimized for 2D and 3D based operating systems, graphical user interfaces, video games, visual imaging graphics, video, visual computing, and display. applications, and video. Th e modern GPU that we describe here is a highly parallel, highly multithreaded multiprocessor optimized for visual computing. To provide visual computing real-time visual interaction with computed objects via graphics, images, and video, A mix of graphics the GPU has a unifi ed graphics and computing architecture that serves as both a processing and computing programmable graphics processor and a scalable parallel computing platform. PCs that lets you visually interact with computed and game consoles combine a GPU with a CPU to form heterogeneous systems. -

An Introductory Tour of Interactive Rendering by Eric Haines, [email protected]
An Introductory Tour of Interactive Rendering by Eric Haines, [email protected] [near-final draft, 9/23/05, for IEEE CG&A January/February 2006, p. 76-87] Abstract: The past decade has seen major improvements, in both speed and quality, in the area of interactive rendering. The focus of this article is on the evolution of the consumer-level personal graphics processor, since this is now the standard platform for most researchers developing new algorithms in the field. Instead of a survey approach covering all topics, this article covers the basics and then provides a tour of some parts the field. The goals are a firm understanding of what newer graphics processors provide and a sense of how different algorithms are developed in response to these capabilities. Keywords: graphics processors, GPU, interactive, real-time, shading, texturing In the past decade 3D graphics accelerators for personal computers have transformed from an expensive curiosity to a basic requirement. Along the way the traditional interactive rendering pipeline has undergone a major transformation, from a fixed- function architecture to a programmable stream processor. With faster speeds and new functionality have come new ways of thinking about how graphics hardware can be used for rendering and other tasks. While expanded capabilities have in some cases simply meant that old algorithms could now be run at interactive rates, the performance characteristics of the new hardware has also meant that novel approaches to traditional problems often yield superior results. The term “interactive rendering” can have a number of different meanings. Certainly the user interfaces for operating systems, photo manipulation capabilities of paint programs, and line and text display attributes of CAD drafting programs are all graphical in nature.