An Analysis of Inertial Seisometer-Galvanometer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Absolute Measurement of Capacity
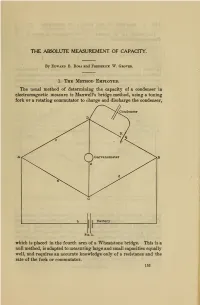
THE ABSOLUTE MEASUREMENT OF CAPACITY. By Edwakd B. Rosa and Frederick "W. Grover. 1. The Method Employed. The usual method of determining the capacity of a condenser in electromagnetic measure is Maxwell's bridge method, using a tuning fork or a rotating commutator to charge and discharge the condenser, Fig. 1. which is placed in the fourth arm of a Wheatstone bridge. This is a null method, is adapted to measuring large and small capacities equally well, and requires an accurate knowledge only of a resistance and the rate of the fork or commutator. 153 154 BULLETIN OF THE BUREAU OF STANDARDS. [vol.1, no. 2. The formula for the capacity C of the condenser as given by J. J Thomson, is as follows: * i_L a (a+h+d){a+c+g) 0= (1) ncd \} +c{a+l+d))\} + d(a+c+g)) in which <z, c, and d are the resistances of three arms of a Wheatstone bridge, b and g are battery and galvanometer resistances, respectively, and n is the number of times the condenser is charged and discharged per second. When the vibrating arm P touches Q the condenser is charged, and when it touches P it is short circuited and discharged. When Pis not touching Q the arm BD of the bridge is interrupted and a current flows from D to C through the galvanometer; when P touches Q the condenser is charged by a current coming partly through c and partly through g from C to D. Thus the current through the galvanometer is alternately in opposite directions, and when these opposing currents balance each other there is no deflection of the gal- vanometer. -

Electrical & Electronics Measurement Laboratory Manual
DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT Electrical & Electronics Measurement Laboratory Manual By Dr. Madhab Chandra Tripathy Assistant Professor DEPARTMENT OF INSTRUMENTAION AND ELECTRONICS ENGINEERING COLLEGE OF ENGINEERING AND TECHNOLOGY BHUBANESWAR-751003 PAGE 1 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT List of Experiments PCEE7204 Electrical and Electronics Measurement Lab Select any 8 experiments from the list of 10 experiments 1. Measurement of Low Resistance by Kelvin’s Double Bridge Method. 2. Measurement of Self Inductance and Capacitance using Bridges. 3. Study of Galvanometer and Determination of Sensitivity and Galvanometer Constants. 4. Calibration of Voltmeters and Ammeters using Potentiometers. 5. Testing of Energy meters (Single phase type). 6. Measurement of Iron Loss from B-H Curve by using CRO. 7. Measurement of R, L, and C using Q-meter. 8. Measurement of Power in a single phase circuit by using CTs and PTs. 9. Measurement of Power and Power Factor in a three phase AC circuit by two-wattmeter method. 10. Study of Spectrum Analyzers. PAGE 2 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT DO’S AND DON’TS IN THE LAB DO’S:- 1. Students should carry observation notes and records completed in all aspects. 2. Correct specifications of the equipment have to be mentioned in the circuit diagram. 3. Students should be aware of the operation of equipments. 4. Students should take care of the laboratory equipments/ Instruments. 5. After completing the connections, students should get the circuits verified by the Lab Instructor. -
Manual S/N Prefix 11
HP Archive This vintage Hewlett Packard document was preserved and distributed by www. hparchive.com Please visit us on the web ! On-line curator: Glenn Robb This document is for FREE distribution only! OPERATING AND SERVICING MANUAL FOR MODEL 475B TUNABLE BOLOMETER MOUNT Serial 11 and Above Copyright 1956 by Hewlett-Packard Company The information contained in this booklet is intended for the operation and main· tenance oC Hewlett-Packard equipment and is not to be used otherwise or reproduced without the written consent of the Hewlett Packard Company. HEWLETT-PACKARD COMPANY 275 PAGE MILL ROAD, PALO ALTO, CALIFORNIA, U. S. A. 475BOOl-1 SPECIFICATIONS FREQUENCY RANGE: Approximately 1000 - 4000 MC (varies with SWR and phase of source and value of bolometer load.) POWER RANGE: 0.1 to 10 milliwatts (with -hp- Model 430C Microwave Power Meter.) FITTINGS: Input Connector - Type N female (UG 23/U). Output Connector (bolometer dc connec tion) - Type BNC (UG 89/U). Type N Male Connector (UG 21/U) sup plied to replace bolometer connector so that mount may be used as a conven tional double -stub transformer. POWER SENSITIVE ELEMENT: Selected 1/100 ampere instrument fuse. Sperry 821 or Narda N821 Barretter. Western Electric Type D166382 Ther mistor. OVERALL DIMENSIONS: 1811 long x 7-3/8" wide x 3-5/811 deep. WEIGHT: 8 pounds. ...... ...... Pl ::l P. Pl 0-' o <: Cil >+> -J lJ1 lJj o o ...... ......I • OPERATING INSTRUC TIONS INSPECTION This instrument has been thoroughly tested and inspected before being shipped and is ready for use when received. After the instrument is unpacked, it should be carefully inspected for any damage received in transit. -

(Ohmmeter). Aims: • Calibrating of a Sensitive Galvanometer for Measuring a Resistance
Exp ( ) Calibrating of a sensitive galvanometer for measuring a resistance (Ohmmeter). Aims: • Calibrating of a sensitive galvanometer for measuring a resistance. The theory When a galvanometer is used as an ohmmeter for measuring an ohmic resistance R, the deviation angle θ of the galvanometer’s coil is directly proportional to the flowing current through the coil and inversely proportional to the value of the resistance. The deviation will reach to the maximum end when the resistance equals to zero or the current has the maximum value. For this reason, the scale will be divide by inversely way in comparison with the ammeter and the voltmeter. The original circuit as shown in Fig(1) consists of a dry cell(E) , rheostat and ammeter (A) are connected in series with small resistor s has the range of 1 omega. The two terminals of “s” are connected in parallel to another combination includes a sensitive galvanometer “G” which has internal resistance “r” and a resistors box “R”, this combination is called the measuring circuit. When the value of R equals zero, and by moving the rheostat in the original circuit, it is possible to set the flowing electric current in measuring the circuit as a maximum value od deviation in the galvanometer. By assigning different values of R, the deviation θ is decreasing with increasing the value of R or by another meaning when the flowing current through the galvanometer decreases. Therefore, the current through the galvanometer is inversely proportional to the value of R according the following Figure 1: Ohmmeter Circuit diagram equation; V=I(R+r) R=V/I-r or R=V/θ-r 1 | P a g e This is a straight-line equation between R and (1/θ) as shown in Fig(2). -

Ballastic Galvanometer This Is a Sophisticated Instrument. This
Ballastic galvanometer This is a sophisticated instrument. This works on the principle of PMMC meter. The only difference is the type of suspension is used for this meter. Lamp and glass scale method is used to obtain the deflection. A small mirror is attached to the moving system. Phosphorous bronze wire is used for suspension. When the D.C. voltage is applied to the terminals of moving coil, current flows through it. When a current carrying coil kept in the magnetic field, produced by permanent magnet, it experiences a force. The coil deflects and mirror deflects. The light spot on the glass scale also move. This deflection is proportional to the current through the coil. Q i = , Q = it = idt t Q , deflection Charge Fig 2.27 Ballastic galvanometer Measurements of flux and flux density (Method of reversal) D.C. voltage is applied to the electromagnet through a variable resistance R1 and a reversing switch. The voltage applied to the toroid can be reversed by changing the switch from position 2 to position ‘1’. Let the switch be in position ‘2’ initially. A constant current flows through the toroid and a constant flux is established in the core of the magnet. A search coil of few turns is provided on the toroid. The B.G. is connected to the search coil through a current limiting resistance. When it is required to measure the flux, the switch is changed from position ‘2’ to position ‘1’. Hence the flux reduced to zero and it starts increasing in the reverse direction. The flux goes from + to - , in time ‘t’ second. -

802314-3) Laboratory Manual (Fall 2016: Term 1, 1437/1438H
اﳌﻤﻠﻜﺔ اﻟﻌﺮﺑﻴﺔ اﻟﺴﻌﻮدﻳﺔ KINGDOM OF SAUDI ARABIA Ministry of Higher Education وزارة اﻟﺘﻌﻠﻴﻢ اﻟﻌﺎﱄ - ﺟﺎﻣﻌﺔ أم اﻟﻘﺮى Umm Al-Qura University ﻛﻠﻴﺔ اﳍﻨﺪﺳﺔ و اﻟﻌﻤﺎرة اﻹﺳﻼﻣﻴﺔ College of Engineering and Islamic Architecture ﻗﺴﻢ اﳍﻨﺪﺳﺔ اﻟﻜﻬﺮ?ﺋﻴﺔ Electrical Engineering Department ELECTRICAL AND ELECTRONIC MEASUREMENTS (802314-3) Laboratory Manual (Fall 2016: Term 1, 1437/1438H) Prepared by: Dr. Makbul Anwari Approved by: Control Sequence Committee Table of Contents Page 1. Introduction 3 2. Laboratory Safety 3 3. Lab Report 5 4. Experiment # 1: 6 5. Experiment # 2: 11 6. Experiment # 3: 19 7. Experiment # 4: 25 8. Experiment # 5: 29 2 Introduction This manual has been prepared for use in the course 802314-3, Electrical and Electronic Measurements. The laboratory exercises are devised is such a way as to reinforce the concepts taught in the lectures. Before performing the experiments the student must be aware of the basic laboratory safety rules for minimizing any potential dangers. The students must complete and submit the pre-lab report of each exercise before performing the experiment. The objective of the experiment must be kept in mind throughout the lab experiment. Laboratory Safety: ∑ Safety in the electrical engineering laboratory, as everywhere else, is a matter of the knowledge of potential hazards, following safety regulations and precautions, and common sense. ∑ Observing safety precautions is important due to pronounced hazards in any electrical engineering laboratory. ∑ All the UQU Electrical Engineering Students, Teaching Assistants, Lab Engineers, and Lab technicians are required to be familiar with the LABORATORY SAFETY GUIDELINES FOR THE UQU ELECTRICAL ENGINEERING UNDERGRADUATE LAB AREAS published on the department web-page. -
TI S4 Audio Frequency Test Apparatus.Pdf
TECHNICAL INSTRUCTION S.4 Audio-frequency Test Apparatus BRITISH BROADCASTING , CORPORATION ENGINEERING DlVlSlON - ', : . iv- TECHNICAL INSTRUCTION S.4 Third Issue 1966 instruction S.4 Page reissued May. 1966 CONTENTS Page Section I . Amplifier Detector AD14 . 1.1 Section 2 . Variable Attenuator AT119 . Section 3 . Wheatstone Bridge BG/I . Section 4 . Calibration IJnit CALI1 . Section 5. Harmonic Routine Tester FHP/3 . Section 6 . 0.B. Testing Unit 0BT/2 . Section . 7 . Fixed-frequency Oscillators OS/9. OS/ 10. OS/ IOA . Section 8 . Variable-frequency Oscillators TS/5 .. TS/7 . 1' . TS/8 . TS/9 . TS/ 10. TS/ 1OP . Section 9 . Portable Oscillators PTS/9 . PTS/IO . ... PTS/12 . PTS/13 . PTS/l5 .... PTS/l6 .... Appendix . The Zero Phase-shift Oscillator with Wien-bridge Control Section 10. Transmission Measuring Set TM/I . Section 1 I . Peak Programme Meter Amplifiers PPM/2 ..... PPM/6 . TPM/3 . Section 12 Valve Test Panels VT/4. VT/5 "d . Section 13. Microphone Cable Tester MCT/I . Section 14 . Aural Sensitivity Networks ASN/3. ASN/4 Section 15 . Portable Amplifier Detector PAD19 . Section 16. Portable Intermodulation Tester PIT11 Section 17. A.C. Test Meters ATM/I. ATM/IP . Section 18 . Routine Line Testers RLT/I. RLT/IP . Section 19. Standard Level Panel SLP/3 . Section 20 . A.C. Test Bay AC/55 . Section 21 . Fixed-frequency Oscillators: OS2 Series Standard Level Meter ME1611 . INSTRUCTION S.4 Page reissued May 1966 ... CIRCUIT DIAGRAMS AT END Fig. 1. Amplifier Detector AD14 Fig. 2. Wheatstone Bridge BG/1 Fig. 3. Harmonic Routine Tester FHP/3 Fig. 4. Oscillator OS/9 Fig. -

A History of Impedance Measurements
A History of Impedance Measurements by Henry P. Hall Preface 2 Scope 2 Acknowledgements 2 Part I. The Early Experimenters 1775-1915 3 1.1 Earliest Measurements, Dc Resistance 3 1.2 Dc to Ac, Capacitance and Inductance Measurements 6 1.3 An Abundance of Bridges 10 References, Part I 14 Part II. The First Commercial Instruments 1900-1945 16 2.1 Comment: Putting it All Together 16 2.2 Early Dc Bridges 16 2.3 Other Early Dc Instruments 20 2.4 Early Ac Bridges 21 2.5 Other Early Ac Instruments 25 References Part II 26 Part III. Electronics Comes of Age 1946-1965 28 3.1 Comment: The Post-War Boom 28 3.2 General Purpose, “RLC” or “Universal” Bridges 28 3.3 Dc Bridges 30 3.4 Precision Ac Bridges: The Transformer Ratio-Arm Bridge 32 3.5 RF Bridges 37 3.6 Special Purpose Bridges 38 3,7 Impedance Meters 39 3.8 Impedance Comparators 40 3.9 Electronics in Instruments 42 References Part III 44 Part IV. The Digital Era 1966-Present 47 4.1 Comment: Measurements in the Digital Age 47 4.2 Digital Dc Meters 47 4.3 Ac Digital Meters 48 4.4 Automatic Ac Bridges 50 4.5 Computer-Bridge Systems 52 4.6 Computers in Meters and Bridges 52 4.7 Computing Impedance Meters 53 4.8 Instruments in Use Today 55 4.9 A Long Way from Ohm 57 References Part IV 59 Appendices: A. A Transformer Equivalent Circuit 60 B. LRC or Universal Bridges 61 C. Microprocessor-Base Impedance Meters 62 A HISTORY OF IMPEDANCE MEASUREMENTS PART I. -

Complex Circuits Paige Cooper, Adriana Knight, Liz Larsen, Ryan Olesen Meters
Complex Circuits Paige Cooper, Adriana Knight, Liz Larsen, Ryan Olesen Meters Voltmeters are devices that measure voltage → use parallel connections Ammeters are devices that measure current → use series connections If charges only flow in one direction, then the circuit is considered a Direct Current. In this unit we are talking about meters that utilize DCs. Parallel Connection - A parallel circuit has more than one resistor (anything that uses electricity to do work) and gets its name from having multiple (parallel) paths to move along . Charges can move through any of several paths. - More current flows through the smaller resistance. (More charges take the easiest path.) - As the charges move through the resistors they do work on the resistor and as a result, they lose electrical energy. - By the time each charge makes it back to the battery, it has lost all the electrical energy given to it by the battery. - a charge can only do as much work as was done on it by the battery Series Connection In a series connection the currents all go through the same series of components in the circuit. Because of this, all of the components carry the same current. There is only one path in which the current may go. Analog Meters : Galvanometers ● Analog: Needles that swivel and point at number on the scale ● Digital meters: numerical readouts ● Current flows through the Galvanometers and produces a proportional needle deflection ● Current sensitivity→ It is deflection produced in the galvanometer per unit current flowing through it, the maximum current that the instrument can measure. ● The internal resistance of galvanometers are close to zero. -

The OHM Meter an Ohmmeter Is an Electrical Instrument That Measures
The OHM meter An ohmmeter is an electrical instrument that measures electrical resistance, the opposition to an electric current. Micro-ohmmeters (microhmmeter or microohmmeter) make low resistance measurements. Megohmmeters (aka megaohmmeter or in the case of a trademarked device Megger) measure large values of resistance. The unit of measurement for resistance is ohms (). The original design of an ohmmeter provided a small battery to apply a voltage to a resistance. It uses a galvanometer to measure the electric current through the resistance. The scale of the galvanometer was marked in ohms, because the fixed voltage from the battery assured that as resistance is decreased, the current through the meter would increase. Ohmmeters form circuits by themselves, therefore they cannot be used within an assembled circuit. A more accurate type of ohmmeter has an electronic circuit that passes a constant current (I) through the resistance, and another circuit that measures the voltage (V) across the resistance. According to the following equation, derived from Ohm's Law, the value of the resistance (R) is given by: On the ohms ranges of a normal multimeter the unknown resistance is connected in series with a battery and the meter and the scale reads backwards. A variable resistor is included in the circuit so that the meter can be adjusted to read full scale with the test terminals shorted (Fig 1). In the shunt ohmmeter a battery and variable resistor are connected across a milli ammeter and the resistor is adjusted so that the meter reads full scale with the test terminals are unconnected (Fig.2). -

Megohmmeter Model 1000N (Catalog# 185.100) Repair and Calibration Manual
Rev. 8 3/04 MEGOHMMETER MODEL 1000N (CATALOG# 185.100) REPAIR AND CALIBRATION MANUAL MODEL 1000N REPAIR AND CALIBRATION MANUAL CAT. #185.100 TABLE OF CONTENTS Repair and Technical Services....................................................................................... 3 Introduction..................................................................................................................... 4 Specific Features............................................................................................................ 4 Principal Characteristics ................................................................................................. 4 Specifications ..................................................................................................................6 Operation........................................................................................................................ 7 Calibration .................................................................................................................... 11 Taking the Instrument Apart ......................................................................................... 14 Troubleshooting............................................................................................................ 17 Summary of Malfunctions ............................................................................................. 20 Component Parts List................................................................................................... 21 Mechanical -

Microwave Measurements of Hall Mobilities in Semiconductors
MICROWAVE MEASUREMENTS OF HALL MOBILITIES IN SEMICONDUCTORS by Yuiehiro Nishina A Dissertation Submitted to the Graduate Faculty in Partial Fulfillment of The Requirements for the Degree of DOCTOR OF PHILOSOPHY Major Subject: Physics Approved: Signature was redacted for privacy. In Chargé of Major Work Signature was redacted for privacy. /Head of Major Department / Signature was redacted for privacy. Iowa State University Of Science and Technology Ames, Iowa 1960 il TABLE OF CONTENTS Page ABSTRACT vi I. INTRODUCTION 1 A. Hall Effect 1 B. Hall Effect In High Frequency Field .... 4 C. Previous Work on Microwave Hall Effect Measurement 6 D. Purpose of This Investigation 8 II. THEORY 9 A. Conductivity Tensor 9 B. Conductivity Tensor and the Hall Effect . 12 C. Principle of Measurement 15 1. Microwave degenerate cavity 15 2. Microwave power relationship 19 III. EXPERIMENTAL PROCEDURE 26 A. Microwave Measurement 26 1. Microwave cavity £6 2. Sample preparation 29 3. Temperature measurement and control . 31 4. Microwave measurement 34 B . D . C. Measurement 38 1. Cryostat and sample preparation .... 38 2. Electrical measurement 41 IV. EXPERIMENTAL RESULTS 45 A. N-type Germanium 45 1. Room temperature measurement 45 2. Low temperature measurement 52 B . P-type Germanium 57 iii Page V. DISCUSSION 65 A. Errors 65 1. Microwave measurement 65 c- D-C. measurement 68 B. Effect of Depolarization 70 C. Effect of Cyclotron Resonance 73 D - Future v/ork 76 VI. CONCLUSION 78 VII. REFERENCES 80 VIII. ACKNOWLEDGMENTS 83 IX. APPENDIX 84 iv LIST OF TABLES Page /Pjj i Table 1. Magnetic field dependence of VPII/-= i 1_ + R_| I for n-type germanium (GK-ô) at room temperature 85 Table 'c.