Sts-110 F R a M E W O R K F O R E X P a N D I N G S T a T I O N R E S E a R C H
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Soyuz TMA-11 / Expedition 16 Manuel De La Mission
Soyuz TMA-11 / Expedition 16 Manuel de la mission SOYUZ TMA-11 – EXPEDITION 16 Par Philippe VOLVERT SOMMAIRE I. Présentation des équipages II. Présentation de la mission III. Présentation du vaisseau Soyuz IV. Précédents équipages de l’ISS V. Chronologie de lancement VI. Procédures d’amarrage VII. Procédures de retour VIII. Horaires IX. Sources A noter que toutes les heures présentes dans ce dossier sont en heure GMT. I. PRESENTATION DES EQUIPAGES Equipage Expedition 15 Fyodor YURCHIKHIN (commandant ISS) Lieu et Lieu et date de naissance : 03/01/1959 ; Batumi (Géorgie) Statut familial : Marié et 2 enfants Etudes : Graduat d’économie à la Moscow Service State University Statut professionnel: Ingénieur et travaille depuis 1993 chez RKKE Roskosmos : Sélectionné le 28/07/1997 (RKKE-13) Précédents vols : STS-112 (07/10/2002 au 18/10/2002), totalisant 10 jours 19h58 Oleg KOTOV(ingénieur de bord) Lieu et date de naissance : 27/10/1965 ; Simferopol (Ukraine) Statut familial : Marié et 2 enfants Etudes : Doctorat en médecine obtenu à la Sergei M. Kirov Military Medicine Academy Statut professionnel: Colonel, Russian Air Force et travaille au centre d’entraînement des cosmonautes, le TsPK Roskosmos : Sélectionné le 09/02/1996 (RKKE-12) Précédents vols : - Clayton Conrad ANDERSON (Ingénieur de vol ISS) Lieu et date de naissance : 23/02/1959 ; Omaha (Nebraska) Statut familial : Marié et 2 enfants Etudes : Promu bachelier en physique à Hastings College, maîtrise en ingénierie aérospatiale à la Iowa State University Statut professionnel: Directeur du centre des opérations de secours à la Nasa Nasa : Sélectionné le 04/06/1998 (Groupe) Précédents vols : - Equipage Expedition 16 / Soyuz TM-11 Peggy A. -

Valentine's Day
Dudley Hart REMINISCE leading at SUNDAY Vintage Valentines Pebble Beach ..........Page A-8 Feb. 10, 2008 ................................Page A-3 INSIDE Mendocino County’s World briefly The Ukiah local newspaper .......Page A-2 Monday: Mostly sunny; H 68º L 40º Tuesday: Sunshine, clouds; H 66º L 41º $1 tax included DAILY JOURNAL ukiahdailyjournal.com 44 pages, Volume 149 Number 307 email: [email protected] BOARD OF Local candy shop turning out SUPERVISORS Valentine’s Day: the chocolates Asphalt House of facility Burgess EIR on The bridge agenda By ROB BURGESS to nowhere The Daily Journal By ROB BURGESS A long-simmering debate The Daily Journal about the future of a local I’ve decided that I’m pretty quarry is likely set to once much the last person to know again boil over into impas- when it comes to most things. sioned rhetoric at Tuesday’s Before my coworker Sarah Mendocino County Board of told me about the documen- Supervisors meeting. tary “The Bridge,” I had no At 9:15 a.m., the board is idea the Golden Gate Bridge scheduled to introduce the was such a popular suicide Harris Quarry Draft destination. There have been Environmental Impact Report, more than 1,200 such deaths which will focus on both pub- there since it opened in 1937. lic and supervisor comments The film’s director, Eric on a proposed asphalt batch Steel, explored this phenome- plant on the site near Willits. non by recording almost two Several community groups, dozen of these leaps during including the Ridgewood Park the course of a year. -

Address by NASA Administrator Sean O'keefe
Remarks by the Honorable Sean O’Keefe NASA Administrator Apollo 11 Anniversary Event Smithsonian National Air and Space Museum July 20, 2004 Good evening ladies and gentlemen. It is a great privilege to be in this shrine to aviation and spaceflight achievement in the presence of America's first great generation of space explorers, those who made their epic voyages possible, and of our current astronauts and the NASA team members who will enable humanity's next momentous steps in space as Dr. Marburger (Presidential Science Advisory Dr. Jack Marburger) just so eloquently discussed. There are so many great friends here from Congress who been very, very important in our quest to make this next great step feasible. Senator Bill Nelson, Congressmen Ralph Hall, Nick Lampson, Sheila Jackson Lee, Mike McIntyre, Mike Pence, Vic Snyder, Dave Weldon, Bob Aderholt, Chairman of 1 the Science Committee Sherry Boehlert, Sam Johnson, Tom Feeney, Space and Aeronautics Subcommittee Chairman Dana Rohrabacher and Juliane Sullivan who is here representing Majority Leader Tom DeLay. We are delighted for their participation, their help, their enthusiasm for I think the importance of this evening's event, as well as for our continued quest forward. I doubt there are any historical parallels to our good fortune here. Certainly, no records exist of people living in Lisbon 500 years ago attending a candlelit tribute to Amerigo Vespucci, Vasco da Gama and Ferdinand Magellan, who was about to set forth on his voyage to circle the globe. Yet here we are, in the midst of another great age of exploration, thrilled to have under one roof so many heroes who've sailed over the far horizon to the shores of space and back, including to a dusty Sea named Tranquility. -

Expedition 8 MISSION OVERVIEW
Expedition 8 MISSION OVERVIEW To Improve Life Here, Science Comes to the Forefront To Extend Life to There, To Find Life Beyond. Experiments from earlier expeditions will Education Payload Operations (EPO) remain aboard the International Space include three educational activities that That is NASAs vision. Station (ISS), continuing to benefit from will focus on demonstrating science, long-term exposure to microgavity, and mathematics, technology, engineering or Michael Foale, additional studies in the life and physical geography principles. Expedition 8 Commander, NASA ISS sciences and space technology development Group Activation Packs -- YEAST will Science Officer: will be added. evaluate the role of individual genes in the When we look back fifty years to this time, we Most of the research complement for response of yeast to space flight conditions. wont remember the experiments that were Expedition 8 will be carried out with The results of this research could help performed, we wont remember the assembly scientific research facilities and samples clarify how mammalian cells grow under that was done, we may barely remember any already on board the Space Station. microgravity conditions and determine if individuals. What we will know was that countries Additional experiments are being evaluated genes are altered. came together to do the first joint international and prepared to take advantage of the Synchronized Position Hold, Engage, project, and we will know that that was the seed limited cargo space on the Soyuz or Reorient, Experimental Satellites that started us off to the moon and Mars. Progress vehicles. The research agenda for (SPHERES) will allow scientists to study the expedition remains flexible. -
Appendix Program Managers/Acknowledgments
Flight Information Appendix Program Managers/Acknowledgments Selected Readings Acronyms Contributors’ Biographies Index Image of a Legac y—The Final Re-entry Appendix 517 Flight Information Approx. Orbiter Enterprise STS Flight No. Orbiter Crew Launch Mission Approach and Landing Test Flights and Crew Patch Name Members Date Days 1 Columbia John Young (Cdr) 4/12/1981 2 Robert Crippen (Plt) Captive-Active Flights— High-speed taxi tests that proved the Shuttle Carrier Aircraft, mated to Enterprise, could steer and brake with the Orbiter perched 2 Columbia Joe Engle (Cdr) 11/12/1981 2 on top of the airframe. These fights featured two-man crews. Richard Truly (Plt) Captive-Active Crew Test Mission Flight No. Members Date Length 1 Fred Haise (Cdr) 6/18/1977 55 min 46 s Gordon Fullerton (Plt) 2 Joseph Engle (Cdr) 6/28/1977 62 min 0 s 3 Columbia Jack Lousma (Cdr) 3/22/1982 8 Richard Truly (Plt) Gordon Fullerton (Plt) 3 Fred Haise (Cdr) 7/26/1977 59 min 53 s Gordon Fullerton (Plt) Free Flights— Flights during which Enterprise separated from the Shuttle Carrier Aircraft and landed at the hands of a two-man crew. 4 Columbia Thomas Mattingly (Cdr) 6/27/1982 7 Free Flight No. Crew Test Mission Henry Hartsfield (Plt) Members Date Length 1 Fred Haise (Cdr) 8/12/1977 5 min 21 s Gordon Fullerton (Plt) 5 Columbia Vance Brand (Cdr) 11/11/1982 5 2 Joseph Engle (Cdr) 9/13/1977 5 min 28 s Robert Overmyer (Plt) Richard Truly (Plt) William Lenoir (MS) 3 Fred Haise (Cdr) 9/23/1977 5 min 34 s Joseph Allen (MS) Gordon Fullerton (Plt) 4 Joseph Engle (Cdr) 10/12/1977 2 min 34 s Richard Truly (Plt) 5 Fred Haise (Cdr) 10/26/1977 2 min 1 s 6 Challenger Paul Weitz (Cdr) 4/4/1983 5 Gordon Fullerton (Plt) Karol Bobko (Plt) Story Musgrave (MS) Donald Peterson (MS) The Space Shuttle Numbering System The first nine Space Shuttle flights were numbered in sequence from STS -1 to STS-9. -

ISS Spacewalk History Spacecalc
CBS News/Spaceflight Now U.S. Spacewalk Statistics 9/15/06 ISS Spacewalk History SpaceCalc Expedition EVAs HH MM # Astronaut/Cosmonaut EVAs HH MM 0 Expedition 1 00 00 1 Anatoly Solovyov 16 77 41 1 Expedition 2 2001 00 19 2 Jerry Ross 9 58 18 4 Expedition 3 2001 18 40 3 Steven Smith 7 49 48 3 Expedition 4 2001-2002 17 49 4 Joe Tanner 7 46 29 2 Expedition 5 2002 09 46 5 Nikolai Budarin 9 46 14 2 Expedition 6 2003 13 17 6 James Newman 6 43 13 0 Expedition 7 00 00 7 Talgat Musabayev 8 43 02 1 Expedition 8 2004 03 55 8 Yuri Onufrienko 8 42 52 4 Expedition 9 2004 15 45 9 Sergei Avdeyev 10 41 59 2 Expedition 10 2004-2005 09 58 10 Piers Sellers 6 41 10 1 Expedition 11 2005 04 58 11 Sergei Krikalev 8 41 08 2 Expedition 12 2005-2006 11 05 12 Victor Afanaseyev 7 38 33 2 Expedition 13 2006 12 25 13 Vladimir Dezhurov 9 37 56 0 Expedition 14 00 00 14 John Grunsfeld 5 37 32 0 Expedition 15 00 00 15 Leroy Chiao 6 36 16 0 Expedition 16 00 00 16 Musa Manarov 7 34 32 0 Expedition 17 00 00 17 Mike Lopez-Alegria 5 33 58 18 Pavel Vinogradov 6 32 50 24 TOTAL ISS Expedition EVA Time 117 57 19 Yury Usachev 7 31 48 20 Tom Akers 4 29 41 28 Total STS-based ISS EVAs 187 20 21 Story Musgrave 4 26 19 44 Total ISS-based ISS/STS EVAs 251 16 22 Mark Lee 4 26 01 Shortest ISS EVA (U.S. -

International Space Medicine Summit 2019
INTERNATIONAL SPACE MEDICINE SUMMIT 2019 October 10–13, 2019 • Rice University’s Baker Institute for Public Policy • Houston, Texas INTERNATIONAL SPACE MEDICINE SUMMIT 2019 October 10–13, 2019 • Rice University’s Baker Institute for Public Policy • Houston, Texas About the Event As we continue human space exploration, much more research is needed to prevent and/or mitigate the medical, psychological and biomedical challenges spacefarers face. The International Space Station provides an excellent laboratory in which to conduct such research. It is essential that the station be used to its fullest potential via cooperative studies and the sharing of equipment and instruments between the international partners. The application of the lessons learned from long-duration human spaceflight and analog research environments will not only lead to advances in technology and greater knowledge to protect future space travelers, but will also enhance life on Earth. The 13th annual International Space Medicine Summit on Oct. 10-13, 2019, brings together the leading physicians, space biomedical scientists, engineers, astronauts, cosmonauts and educators from the world’s spacefaring nations for high-level discussions to identify necessary space medicine research goals as well as ways to further enhance international cooperation and collaborative research. All ISS partners are represented at the summit. The summit is co-sponsored by the Baker Institute Space Policy Program, Texas A&M University College of Engineering and Baylor College of Medicine. Organizers Rice University’s Baker Institute for Public Policy The mission of Rice University’s Baker Institute is to help bridge the gap between the theory and practice of public policy by drawing together experts from academia, government, media, business and nongovernmental organizations. -
C a L E N D a R International Space Station
For more information on the International Space Station, visit: www.nasa.gov/station visit: Station, Space International the on information more For www.nasa.gov National Aeronautics and Space Administration INTERNATIONAL SPACE STATION CALENDAR 2011 A MESSAGE FROM THE PROGRAM MANAGER The International Space Station (ISS) is one of the greatest technological, geopolitical and engineering accomplishments in human 2011 history. The completion of the ISS on-orbit assembly allows for a focus on the multifaceted purpose of the ISS, one of scientific research, technology development, exploration and education. As a National Laboratory, the ISS will provide opportunities beyond NASA to academia, commercial entities and other government agencies to pursue their research and development needs in science, technology development and education. With everyone working together, we look forward to extending human presence beyond and improving life here on Earth. This calendar is designed to show all facets of the ISS using displays of astounding imagery and providing significant historical events with the hope of inspiring the next generation. NASA is appreciative of the commitment that America’s educators demonstrate each and every day as they instruct and shape the young students who will be tomorrow’s explorers and leaders. I hope you enjoy the calendar and are encouraged to learn new and exciting aspects about NASA and the ISS throughout the year. Regards, MICHAEL T. SUFFREDINI ISS Program Manager 1 2 2 3 4 6 5 LOOK HOW FAR WE’VE COME 20 JANUARY NASA has powered us into the 21st century through signature 11 accomplishments that are enduring icons of human achievement. -

STS-135: the Final Mission Dedicated to the Courageous Men and Women Who Have Devoted Their Lives to the Space Shuttle Program and the Pursuit of Space Exploration
National Aeronautics and Space Administration STS-135: The Final Mission Dedicated to the courageous men and women who have devoted their lives to the Space Shuttle Program and the pursuit of space exploration PRESS KIT/JULY 2011 www.nasa.gov 2 011 2009 2008 2007 2003 2002 2001 1999 1998 1996 1994 1992 1991 1990 1989 STS-1: The First Mission 1985 1981 CONTENTS Section Page SPACE SHUTTLE HISTORY ...................................................................................................... 1 INTRODUCTION ................................................................................................................................... 1 SPACE SHUTTLE CONCEPT AND DEVELOPMENT ................................................................................... 2 THE SPACE SHUTTLE ERA BEGINS ....................................................................................................... 7 NASA REBOUNDS INTO SPACE ............................................................................................................ 14 FROM MIR TO THE INTERNATIONAL SPACE STATION .......................................................................... 20 STATION ASSEMBLY COMPLETED AFTER COLUMBIA ........................................................................... 25 MISSION CONTROL ROSES EXPRESS THANKS, SUPPORT .................................................................... 30 SPACE SHUTTLE PROGRAM’S KEY STATISTICS (THRU STS-134) ........................................................ 32 THE ORBITER FLEET ............................................................................................................................ -

Expedition 11
EXPEDITION 11: Opening the Door for Return to Flight WWW.SHUTTLEPRESSKIT.COM Updated April 4, 2004 Expedition 11 Press Kit National Aeronautics and Space Administration Table of Contents Mission Overview .................................................................................................... 1 Crew .......................................................................................................................... 5 Mission Objectives ................................................................................................ 10 Spacewalks ............................................................................................................ 19 Russian Soyuz TMA................................................................................................ 20 Science Overview ................................................................................................... 42 Payload Operations Center.................................................................................... 47 Russian Experiments ............................................................................................ 50 U.S. Experiments .................................................................................................... 58 Italian Soyuz Mission Eneide................................................................................... 92 Media Assistance.................................................................................................. 111 Media Contacts .................................................................................................... -

ESA's ISS External Payloads
number 8, march 2002 on station The Newsletter of the Directorate of Manned Spaceflight and Microgravity http://www.esa.int/spaceflight in this issue A Promising Start to 2002 aurora Jörg Feustel-Büechl Aurora: A European Roadmap 4 ESA Director of Manned Spaceflight and Microgravity for Solar System Exploration Rolf Schulze I want to highlight two very important milestones for this year. Firstly, the final integration and test of our Columbus virtual campus laboratory for the International Space Station began at The Erasmus Virtual Campus 6 Astrium GmbH in Bremen (D) following the arrival in Dieter Isakeit September of the Pre-Integrated Columbus Assembly (PICA) from Alenia Spazio in Turin (I). I believe that we have a payloads masterpiece of European engineering here, and I am ESA’s ISS External Payloads 8 delighted with the progress so far.We should be seeing some Steve Feltham & Giacinto Gianfiglio very real advance on Columbus by the end of 2002 and look forward to its status then. xeus Secondly, I had the opportunity on 15 January to review ISS Assembly of XEUS 10 the course of the Automated Transfer Vehicle (ATV) project at Jens Schiemann Les Mureaux (F), together with our team and the industries involved in the project under prime contractor EADS-LV.The spoe progress is quite remarkable when we remember the SPOE 12 difficulties of last year. All in all, I think that the technical Rolf-Dieter Andresen, Maurizio Nati achievements so far are satisfactory. One important & Chris Taylor demonstration of this progress is the arrival of the ATV Structural Test Model in ESTEC’s Test Centre, where it will research undergo testing during the whole of this year. -
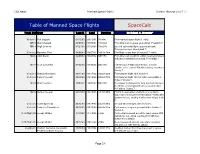
Table of Manned Space Flights Spacecalc
CBS News Manned Space Flights Current through STS-117 Table of Manned Space Flights SpaceCalc Total: 260 Crew Launch Land Duration By Robert A. Braeunig* Vostok 1 Yuri Gagarin 04/12/61 04/12/61 1h:48m First manned space flight (1 orbit). MR 3 Alan Shepard 05/05/61 05/05/61 15m:22s First American in space (suborbital). Freedom 7. MR 4 Virgil Grissom 07/21/61 07/21/61 15m:37s Second suborbital flight; spacecraft sank, Grissom rescued. Liberty Bell 7. Vostok 2 Guerman Titov 08/06/61 08/07/61 1d:01h:18m First flight longer than 24 hours (17 orbits). MA 6 John Glenn 02/20/62 02/20/62 04h:55m First American in orbit (3 orbits); telemetry falsely indicated heatshield unlatched. Friendship 7. MA 7 Scott Carpenter 05/24/62 05/24/62 04h:56m Initiated space flight experiments; manual retrofire error caused 250 mile landing overshoot. Aurora 7. Vostok 3 Andrian Nikolayev 08/11/62 08/15/62 3d:22h:22m First twinned flight, with Vostok 4. Vostok 4 Pavel Popovich 08/12/62 08/15/62 2d:22h:57m First twinned flight. On first orbit came within 3 miles of Vostok 3. MA 8 Walter Schirra 10/03/62 10/03/62 09h:13m Developed techniques for long duration missions (6 orbits); closest splashdown to target to date (4.5 miles). Sigma 7. MA 9 Gordon Cooper 05/15/63 05/16/63 1d:10h:20m First U.S. evaluation of effects of one day in space (22 orbits); performed manual reentry after systems failure, landing 4 miles from target.