Application and Analysis of Marine Water Jet Propulsion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AEROSPACE Magazine App, for an Online Account and Pay Your Subscription Expanded Our E-Library Resources and Launched a Straight Away
AE December 2020 ROSPACE SMART AIRLINER CABINS UK INTEGRATED REVIEW: ALREADY DEAD? CHANGING BUSINESS AVIATION’S IMAGE www.aerosociety.com December 2020 MARS ATTRACTS V olume 47 Number 12 RED PLANET GETS SET FOR NEW ROBOT VISITORS Royal A eronautical Society 11–15 & 19–21 JANUARY 2021 | ONLINE AN E X P A N DEXPERIENCE E D The world’s largest event for aerospace research and development just got bigger! The virtual 2021 AIAA SciTech Forum has expanded into eight days of programming over a two-week time frame. The new format offers a convenient, condensed daily schedule, allowing you to balance your work load and home life while attending a virtual event. Each day will be anchored by a high-level keynote or lecture, with 2,500+ technical presentations, panels, and special sessions scheduled throughout the forum. The forum will explore the functional role and importance of diversity in advancing the aerospace industry. Hear from high-profile industry leaders as they provide perspectives on how diversification of teams, industry sectors, technologies, and design cycles can all be leveraged toward innovation. REGISTER NOW aiaa.org/2021SciTech Volume 47 Number 12 December 2020 EDITORIAL Contents Lost Moon? Regulars 4 Radome 12 Transmission After a week of nail-biting excitement, last month saw a new president The latest aviation and Your letters, emails, tweets aeronautical intelligence, and social media feedback. elected in the US, Joe Biden. Although he is yet to be formally elected by analysis and comment. the Electoral College and inaugurated in January, it is extremely unlikely that 58 The Last Word this will be overturned. -

Boeing History Chronology Boeing Red Barn
Boeing History Chronology Boeing Red Barn PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 Boeing History Chronology PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 PRE -1910 1910 Los Angeles International Air Meet Museum of Flight Collection HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1881 Oct. 1 William Edward Boeing is born in Detroit, Michigan. 1892 April 6 Donald Wills Douglas is born in Brooklyn, New York. 1895 May 8 James Howard “Dutch” Kindelberger is born in Wheeling, West Virginia. 1898 Oct. 26 Lloyd Carlton Stearman is born in Wellsford, Kansas. 1899 April 9 James Smith McDonnell is born in Denver, Colorado. 1903 Dec. 17 Wilbur and Orville Wright make the first successful powered, manned flight in Kitty Hawk, North Carolina. 1905 Dec. 24 Howard Robard Hughes Jr. is born in Houston, Texas. 1907 Jan. 28 Elrey Borge Jeppesen is born in Lake Charles, Louisiana. HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1910 s Boeing Model 1 B & W seaplane HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1910 January Timber baron William E. Boeing attends the first Los Angeles International Air Meet and develops a passion for aviation. March 10 William Boeing buys yacht customer Edward Heath’s shipyard on the Duwamish River in Seattle. The facility will later become his first airplane factory. 1914 May Donald W. Douglas obtains his Bachelor of Science degree from the Massachusetts Institute of Technology (MIT), finishing the four-year course in only two years. -

IHS Newsletter 1997
The NEWSLETTER International Hydrofoil Society P. O. Box 51, Cabin John MD 20818 USA Editor: Barney C. Black SPRING 1997 Co-Editor: John R. Meyer HIGH SPEED VESSELS LEAD INTERNA- NEW IHS HOME PAGE NEW The IHS home page on the World TIONAL FERRY INDUSTRY GROWTH Wide Web has moved. The new URL is: http://www.erols.com/foiler Reprinted From Marine Log, Jan 1997 HELP A STUDENT “I have been unable to find any High speed vehicle-and passenger-carrying ferries are now the practicing hydrofoil specialists, leaving fastest growing segment of the international ferry market. Though most of my research in dusty books high speed passenger craft have been around for thirty years, the spur printed in the 1940’s!” So writes Owen to the sector*s growth has been recent technological advances that have Morris, a student at University of New- improved the economics of this type of vessel operation. This has castle. Every month, IHS receives two or opened up a wide sphere of potential deployment. three calls for help from students and hob- byists working on hydrofoil projects. If “With technology still developing rapidly,” predicts Ocean you can help occasionally with advice, Shipping Consultants of Chertsey, England, “the period to 2005 is design criticism, and ideas, please contact likely to witness considerable advances in both vessel design and in the IHS. We promise not to overload you! acceptance and adoption of the fast ferry concept in ferry markets throughout the world.” NEW IHS E-MAIL ADDRESS NEW At Marine Log*s Ferries ‘96 conference in Fort Lauderdale, [email protected] Ocean Shipping*s director Stephen Hanrahan further predicted that while the scale of growth of passenger-only fast ferries might slacken, the fast car/passenger sector would continue “to display a high level of dynamism.” INSIDE.. -

Driemaandelijks Leden Magazine Oktober-December 12 2012
[13 e s □ n1 — □ o A L i D D X ^ 7 12 Driemaandelijks maritiem magazine 3de jaargang [oktober-december] Verantwoordelijke uitgever: B.S.A. (Belgian Ships Archive) vzw, Letlandstraat 2, 2030 Antwerpen Ondernemingsnummer 0820.847.256 Belgian Ships Archive 2012 Voorwoord Beste lezer Sinterklaas bracht bij ons wat lekkers daarom dachten wij u ook iets te geven aan onze leden rond deze heuglijke tijd: ons 12de (gratis, digitaal (pdf) magazine voor onze leden), weer zoals steeds goedgevuld en nog altijd het hebbedingetje voor onze leden die er met vol enthousiasme naar uitkijken. Zoals reeds in de voorgaande nummers vermeld blijven we vragen om de hulp van onze leden of andere mensen die voor ons artikels willen schrijven, onderwerpen aanbrengen of scheepslijsten maken. Drie maanden zijn kort om steeds zelf het magazine te blijven vullen met maar enkele mensen. Herhaling: Lijsten van schepen, waar er al een heel aantal van verschenen zijn in onze vorige nummers kunnen soms foutieve gegevens bevatten, alsook tekortkomingen. Daarom vragen wij aan onze lezers aanpassingen, verbeteringen en eventueel andere opmerkingen steeds aan ons te laten weten via ons mail adres. De lezers zullen merken dan het artikel over Flandria afgewerkt is, zodoende er nog één lang lopend project bezig is, namelijk de URS, wat is onze volgende nummers verder verwerkt zal worden. Er zullen ook tai van nieuwe initiatieven genomen worden zoals onder andere bijeenkomsten, vergaderingen, happenings en deze zullen georganiseerd worden in ons nieuwe clubhuis. Hiervan zullen wij jullie via deze weg zo goed mogelijk op de hoogte houden. Verder wensen wij jullie alvast veel plezier met ons twaalfde exemplaar van ons magazine dat weer boordevol maritiem nieuws staat. -

When Boeing Is Dreaming – a Review
Journal of Aircraft and Spacecraft Technology Review When Boeing is Dreaming – a Review 1Relly Victoria Virgil Petrescu, 2Raffaella Aversa, 3Bilal Akash, 4Juan Corchado, 2Antonio Apicella and 1Florian Ion T. Petrescu 1ARoTMM-IFToMM, Bucharest Polytechnic University, Bucharest, (CE), Romania 2Advanced Material Lab, Department of Architecture and Industrial Design, Second University of Naples, 81031 Aversa (CE), Italy 3Dean of School of Graduate Studies and Research, American University of Ras Al Khaimah, UAE 4University of Salamanca, Spain Article history Abstract: Boeing is an aeronautical and aerospace manufacturer. Its head Received: 17-04-2017 office is located in Chicago, Illinois. Its two largest plants are located in Revised: 09-05-2017 Wichita, Kansas and Everett, near Seattle. This aircraft manufacturer Accepted: 07-07-2017 specializes in the design of civil aircraft, but also in military aircraft, helicopters Corresponding Author: and in satellites and rockets with its Boeing Defense, Space and Security Florian Ion Tiberiu Petrescu division. In 2012, it ranks second in world military equipment sales. The ARoTMM-IFToMM, Bucharest company was born on July 15, 1916, thanks to its two fathers William E. Polytechnic University, Boeing and George Conrad Westervelt and is named "B and W". Shortly Bucharest, (CE), Romania afterwards, his name became "Pacific Aero Products" and finally "Boeing E-mail: [email protected] Airplane Company". In 1938, Boeing commissioned the 307 Stratoliner; It was the first airplane with pressurized cabin; He was able to fly at a cruising altitude of 20,000 feet, so above most weather disturbances, making him the strongest aircraft in the Boeing fleet. In response to the concentration move in the US defense industry initiated by its competitor Lockheed in 1995, Boeing acquired Rockwell International's space and defense operations in August 1996 for $3.2 billion. -

S I G N I F I C a N T Quickscan Personenvervoer Over Water
1. 1e WOB-verzoek FFF-6.Rapport Significant Quick scan personenvervoer te water (Agenda) SIGNIFICANT Quickscan personenvervoer over water Signifcant B.V. Thorbeckelaan 91 3771 ED Barneveld Provincie Noord-Holland T 0342 40 52 40 Barneveld, 21 november 2012 KvK 39081506 Referentie: PT/mu/12.244 [email protected] Versie: definitief www.significant.nl Auteur(s): Patrick Tazelaar, Paul Jacobs SIGNIFICANT Inhoudsopgave 1. Inleiding 3 1.1 Inleiding 3 1.2 Doelstelling van het onderzoek 3 1.3 Aanpak en karakter van het onderzoek 4 2. Resultaten van de quickscan 5 2.1 De hoofdtypen schepen voor personenvervoer over water 5 2.2 Criteria voor het bepalen van een type schip voor de inzet op een verbinding voor personenvervoer over water 5 2.3 Algemene bevindingen ten aanzien van snelle verbindingen voor personenvervoer over water in de wereld 6 2.3.1 Algemene bevindingen ten aanzien van snelle verbindingen 6 2.3.2 Overzicht van ingezette schepen voor personenvervoer over water 7 2.4 Inzet van snelle schepen op andere verbindingen voor personenvervoer over water in Nederland 8 2.5 Diverse ontwikkelingen ten aanzien van (snelle) schepen voor personenvervoer over water 9 2.6 Overige opmerkingen 10 2.7 Samenvattende conclusies 10 A. Overzicht van verschillende schepen voor personenvervoer over water 12 B. Onderzoeksverantwoording 20 Inhoudsopgave Pagina 2 van 21 SIGNIFICANT 1. Inleiding 01 In dit hoofdstuk zijn de doelstelling en aanpak van de quickscan weergegeven. Dit hoofdstuk is als volgt opgebouwd: 1.1 Inleiding; 1.2 Doelstelling van het onderzoek; 1.3 Aanpak en karakter van het onderzoek. 1.1 Inleiding 02 De Provincie Noord-Holland is opdrachtgever voor de Fast Flying Ferry, de snelle veer• verbinding, op het Noordzeekanaal. -

Batteridrift På Alle Hurtigbåtruter I Trøndelag
Batteridrift på alle hurtigbåtruter i Trøndelag Rapport fra utviklingskontrakt for fremtidens hurtigbåt Flying Foil, Brødrene Aa, Westcon Power and Automation og NTNU FORORD Denne rapporten er skrevet som et resultat av samarbeidet mellom Flying Foil AS, Brødrene Aa AS, Westcon Power & Automation AS og NTNU. Hovedforfatteren av teksten i dette dokumentet er Flying Foil AS, representert ved John Martin Kleven Godø ([email protected]) og Jarle Vinje Kramer ([email protected]) Deler av dette dokumentet inneholder sensitivt informasjon. Det finnes derfor to versjoner av denne teksten; en hvor all informasjon er vist, ment for komiteen til utviklingskontrakten, og en versjon hvor sensitiv informasjon er sladdet. Sladdet tekst og bilder ser slik ut: Sammendrag Utviklingskontrakt for fremtidens hurtigbåt søker svar på spørsmålet: Kan man kjøre de tre hurtigbåtrutene Trondheim-Vanvikan (16km), Trondheim-Brekstad (53km) og Trondheim-Kristiansund (176km) med nullutslipps hurtigbåter? Denne rapporten søker å besvare dette spørsmålet, og er et resultat av et samarbeidsprosjekt mellom Flying Foil, Brødrene Aa, Westcon Power & Automation og NTNU. Målet med dette prosjektet var å lage en ny generasjon hydrofoilfartøy, bygget av karbonfiber med forbedret energieffektivitet i forhold til både tidligere hydrofoilbåter og dagens hurtigbåter. To fartøyer har blitt designet og prosjektert: et 20 m langt fartøy med 129 seter for Trondheim- Vanvikan, og et 30 meter langt fartøy med 270 seter for de resterende rutene. Både batteri- og hydrogendrift har vært vurdert, med den konklusjonen at batteridrift virker å være det foretrukne alternativet for alle rutene. Konklusjonen er basert på økonomiske beregninger som viser at kostnader knyttet til kraftforsyning – drift og investeringskostnader – reduseres med 50% ved å gå for en batteriløsning over hydrogen. -
Here Victoria Hit a Log in the Puget Sound Resulting in One of the Foils Being Knocked Off the Service Was Terminated Altogether Later in 1965
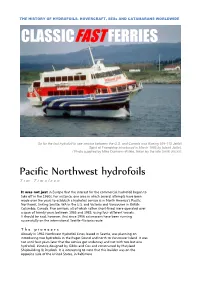
THE HISTORY OF HYDROFOILS, HOVERCRAFT, SESs AND CATAMARANS WORLDWIDE CLASSICFAST FERRIES So far the last hydrofoil to see service between the U.S. and Canada was Boeing 929-115 Jetfoil Spirit of Friendship introduced in March 1985 by Island Jetfoil. / Photo supplied by Mike Dunham–Wilkie, taken by the late DAVE WILKIE Pacific Northwest hydrofoils T i m T i m o l e o n It was not just in Europe that the interest for the commercial hydrofoil began to take off in the 1960s. For instance, one area in which several attempts have been made over the years to establish a hydrofoil service is in North America’s Pacific Northwest, linking Seattle, WA in the U.S. and Victoria and Vancouver in British Columbia, Canada. Five services, all of which rather short-lived, were operated over a span of twenty years between 1965 and 1985, using four different vessels. It should be said, however, that since 1986 catamarans have been running successfully on the international Seattle–Victoria route. T h e p i o n e e r s Already in 1961 Northwest Hydrofoil Lines, based in Seattle, was planning on introducing two hydrofoils in the Puget Sound and north to Vancouver Island. It was not until four years later that the service got underway and not with two but one hydrofoil, Victoria, designed by Gibbs and Cox and constructed by Maryland Shipbuilding & Drydock. It is interesting to note that this builder was on the opposite side of the United States, in Baltimore. The first hydrofoil introduced between Seattle and Vancouver Island, in 1965, was Victoria. -
IHS Newsletter 2008
The NEWSLETTER International Hydrofoil Society P. O. Box 51, Cabin John MD 20818 USA Editor: John R. Meyer First Quarter 2008 Sailing Editor: Martin Grimm STRUCTURAL DESIGN OF AN INNOVATIVE PASSENGER VESSEL SUSTAINING MEMBERS Extract from a technical paper by Dario Boote and Donatella Mascia; Dipartimento di Ingegneria Navale e Tecnologie Marine University of Genova (Italy) he paper was presented at the 2nd International Conference on Ma- Trine Research and Transportation held in June 2007. The main features are described related to the development of an innova- tive passenger ship, starting from the concept design up to the final real- ization of the full-scale prototype. The vessel is a very unconventional solution for the employment in the short-range passenger traffic with a low environmental impact. The proposed solution has been inspired by both hydrofoil and SWATH technologies with the aim of matching rela- tively high speeds, low environmental impact and reduced wave mak- ing. The acronym for this hybrid vessel has been chosen as ENVIROALISWATH, a term which indicates all the mentioned design ____________________________ 2008 IHS DUES ARE DUE See Full Announcement on Page 2 INSIDE THIS ISSUE - President’s Column...... p.2 - Welcome New Members . p. 2 - Russian Aero-Marine.... p.4 - Boat Designer K. Horiuchi p. 5 - Rodriquez’s Messina Yard p. 6 ENVIROALISWATH General Arrangements: Longitudinal Section, Passengers and Vehicle Deck - Sailor’s Page...........p.10 See Innovative Vessel, Page 3 - Winged SES Vehicle .....p.12 PRESIDENT’S COLUMN WELCOME NEW MEMBERS Tom Haman - In 1988 Tom met Sam Bradfield In Melbourne Fla. at the To All IHS Members Florida Institute of Technology when objectives would be best served by he arrived with NF3 an 18sq sailing am pleased to report the Society’s starting with a “virtual” exhibit on the hydrofoil designed for around the Icontinued growth last year with a web. -

British Airways Is Ordering up to 42 Boeing 777-9S Aeronaves to Modernize the UK Flag Carriers Long-Haul Fleet
Journal of Aircraft and Spacecraft Technology Review British Airways is Ordering up to 42 Boeing 777-9s Aeronaves to Modernize the UK Flag Carriers Long-Haul Fleet Relly Victoria Virgil Petrescu ARoTMM-IFToMM, Bucharest Polytechnic University, Bucharest (CE), Romania Article history Abstract: The Boeing 777 (sometimes referred to as Triple 7) is a large- Received: 01-03-2019 capacity subsonic long-haul bomber aircraft built by the American company Revised: 02-03-2019 Boeing. This type of aircraft holds the current record of autonomy for Accepted: 17-02-2020 commercial jets (17,450 km without food). Other special features of the Email: [email protected] aircraft include the perfect circular fuselage, a set of six wheels on each axle of the landing gear and the ability to be equipped with the high-performance General Electric GE90 engine. The 777 has been exclusively designed using CAD technology (with CATIA version 3), being the first airplane designed without building test structures before. Verification of joints and construction techniques has also been done digitally, with all the structures built up being included in the actual aircraft. The aircraft was designed to serve as an immediately superior Boeing 767 model and was built in airline consultancy (United Airlines, American Airlines, Delta Air Lines, ANA, British Airways, JAL, Qantas and Cathay Pacific) came from United Airlines in 1990 and the first flight took place on June 14, 1994, at the Boeing factory in Everett, near Seattle. It was the first ETOPS 180 bimonthly aircraft (it can fly up to 180 min from any airport able to take it). -

South Bay Historical Society Bulletin February 2017 Issue No
South Bay Historical Society Bulletin February 2017 Issue No. 15 Rohr Exhibit in the Chula Vista Heritage Museum A new exhibit on the history of the Rohr Aircraft new materials such as honeycombed titanium. The Corporation opened January 29 at the Chula Vista company employed up to 10,000 workers in its 67 Heritage Museum. This is the second exhibit buildings on 162 acres along the Chula Vista bayfront produced by the South Bay Historical Society for the from G Street to J Street. The influence of the Rohr Museum that opened in January 2016 with the Great weekly payroll was dramatically demonstrated in Flood Centennial exhibit. The Rohr company had a 1954 when Fred Rohr paid his workers in silver profound impact on the history of Chula Vista and the dollars, flooding the community with bags of coins. aircraft industry. It was the world's largest producer Rohr was sold to BF Goodrich in 1997 and became of engine power packages from World War II to the Aerostructures Group. In 2012 United Technologies 1990s. Fred Rohr pioneered the concept of a "feeder" Corp. of Farmington, CT, acquired Goodrich and the subcontractor supplying vital airplane components to former Rohr company became part of UTC the factory where the plane was assembled. He Aerospace Systems. Although the name has changed, developed new tools such as the drop hammer and Rohr remains a vital part of Chula Vista history. 1 Rohr Chronology the Solar Aircraft Company. Prudden was a pioneer in manufacturing metal airplanes, and it was at this Frederick Hilmer Rohr was born May 10, 1896 in time that Rohr developed his drop hammer to shape Hoboken, NJ, the son of Henry Gustav Rohr, a metal parts. -

Hydrofoil Boat for Indonesian Waters
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Hasanuddin University Repository HYDROFOIL BOAT FOR INDONESIAN WATERS. Muhammad Alham DJABBAR 1) 1)Dept. Naval Architecture, Fac. Engineering, Hasanuddin University, Makassar, Indonesia Email: [email protected] Abstract Indonesia with many islands and relatively vast country needs a protection of its sea products and good sea transportation. This is in line with the government plan of maritime axe as well as sea toll. To fulfill the plan, operating high speed (fast) boat including hydrofoil boat will be useful. A couple of researches / studies on hydrofoils had been done and published. The objective is to see the possibility of constructing and operating hydrofoil boats across Indonesian waters optimally This study was based mainly on experience of the author sailing hydrofoil boat from Macau to Hong Kong, China in April, 2014. Several aspects were analyzed, i.e. convenience, cabin facility, and economy. The method of comparison (with other fast boats, different type) and matching with Indonesian waters condition was used. Island shape (distance between cities/ports), & rules / regulations on the boat are accounted. It is found that there is a possibility of constructing and operating hydrofoil boat in Indonesia. Keywords: Hydrofoil boat, Indonesian waters, construction, operating. Introduction In Wikipedia [ 8 ], the free encyclopedia, hydrofoil boat were used for both military and passenger – Canada, USSR, U.S, and Italy are the builder/operator for military while Russian and Ukraine built for passenger for more than 20 countries. The Boeing 929 of U.S. made, was widely used in Asia including Japan, Korean peninsula, Hong Kong and Macau for Passenger.