Development of a Verified Flash File System ⋆
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Membrane: Operating System Support for Restartable File Systems Swaminathan Sundararaman, Sriram Subramanian, Abhishek Rajimwale, Andrea C
Membrane: Operating System Support for Restartable File Systems Swaminathan Sundararaman, Sriram Subramanian, Abhishek Rajimwale, Andrea C. Arpaci-Dusseau, Remzi H. Arpaci-Dusseau, Michael M. Swift Computer Sciences Department, University of Wisconsin, Madison Abstract and most complex code bases in the kernel. Further, We introduce Membrane, a set of changes to the oper- file systems are still under active development, and new ating system to support restartable file systems. Mem- ones are introduced quite frequently. For example, Linux brane allows an operating system to tolerate a broad has many established file systems, including ext2 [34], class of file system failures and does so while remain- ext3 [35], reiserfs [27], and still there is great interest in ing transparent to running applications; upon failure, the next-generation file systems such as Linux ext4 and btrfs. file system restarts, its state is restored, and pending ap- Thus, file systems are large, complex, and under develop- plication requests are serviced as if no failure had oc- ment, the perfect storm for numerous bugs to arise. curred. Membrane provides transparent recovery through Because of the likely presence of flaws in their imple- a lightweight logging and checkpoint infrastructure, and mentation, it is critical to consider how to recover from includes novel techniques to improve performance and file system crashes as well. Unfortunately, we cannot di- correctness of its fault-anticipation and recovery machin- rectly apply previous work from the device-driver litera- ery. We tested Membrane with ext2, ext3, and VFAT. ture to improving file-system fault recovery. File systems, Through experimentation, we show that Membrane in- unlike device drivers, are extremely stateful, as they man- duces little performance overhead and can tolerate a wide age vast amounts of both in-memory and persistent data; range of file system crashes. -

ZBD: Using Transparent Compression at the Block Level to Increase Storage Space Efficiency
ZBD: Using Transparent Compression at the Block Level to Increase Storage Space Efficiency Thanos Makatos∗†, Yannis Klonatos∗†, Manolis Marazakis∗, Michail D. Flouris∗, and Angelos Bilas∗† ∗ Foundation for Research and Technology - Hellas (FORTH) Institute of Computer Science (ICS) 100 N. Plastira Av., Vassilika Vouton, Heraklion, GR-70013, Greece † Department of Computer Science, University of Crete P.O. Box 2208, Heraklion, GR 71409, Greece {mcatos, klonatos, maraz, flouris, bilas}@ics.forth.gr Abstract—In this work we examine how transparent compres- • Logical to physical block mapping: Block-level compres- sion in the I/O path can improve space efficiency for online sion imposes a many-to-one mapping from logical to storage. We extend the block layer with the ability to compress physical blocks, as multiple compressed logical blocks and decompress data as they flow between the file-system and the disk. Achieving transparent compression requires extensive must be stored in the same physical block. This requires metadata management for dealing with variable block sizes, dy- using a translation mechanism that imposes low overhead namic block mapping, block allocation, explicit work scheduling in the common I/O path and scales with the capacity and I/O optimizations to mitigate the impact of additional I/Os of the underlying devices as well as a block alloca- and compression overheads. Preliminary results show that online tion/deallocation mechanism that affects data placement. transparent compression is a viable option for improving effective • storage capacity, it can improve I/O performance by reducing Increased number of I/Os: Using compression increases I/O traffic and seek distance, and has a negative impact on the number of I/Os required on the critical path during performance only when single-thread I/O latency is critical. -

Elinos Product Overview
SYSGO Product Overview ELinOS 7 Industrial Grade Linux ELinOS is a SYSGO Linux distribution to help developers save time and effort by focusing on their application. Our Industrial Grade Linux with user-friendly IDE goes along with the best selection of software packages to meet our cog linux Qt LOCK customers needs, and with the comfort of world-class technical support. ELinOS now includes Docker support Feature LTS Qt Open SSH Configurator Kernel embedded Open VPN in order to isolate applications running on the same system. laptop Q Bug Shield-Virus Docker Eclipse-based QEMU-based Application Integrated Docker IDE HW Emulators Debugging Firewall Support ELINOS FEATURES MANAGING EMBEDDED LINUX VERSATILITY • Industrial Grade Creating an Embedded Linux based system is like solving a puzzle and putting • Eclipse-based IDE for embedded the right pieces together. This requires a deep knowledge of Linux’s versatility Systems (CODEO) and takes time for the selection of components, development of Board Support • Multiple Linux kernel versions Packages and drivers, and testing of the whole system – not only for newcomers. incl. Kernel 4.19 LTS with real-time enhancements With ELinOS, SYSGO offers an ‘out-of-the-box’ experience which allows to focus • Quick and easy target on the development of competitive applications itself. ELinOS incorporates the system configuration appropriate tools, such as a feature configurator to help you build the system and • Hardware Emulation (QEMU) boost your project success, including a graphical configuration front-end with a • Extensive file system support built-in integrity validation. • Application debugging • Target analysis APPLICATION & CONFIGURATION ENVIRONMENT • Runs out-of-the-box on PikeOS • Validated and tested for In addition to standard tools, remote debugging, target system monitoring and PowerPC, x86, ARM timing behaviour analyses are essential for application development. -
Filesystem Considerations for Embedded Devices ELC2015 03/25/15
Filesystem considerations for embedded devices ELC2015 03/25/15 Tristan Lelong Senior embedded software engineer Filesystem considerations ABSTRACT The goal of this presentation is to answer a question asked by several customers: which filesystem should you use within your embedded design’s eMMC/SDCard? These storage devices use a standard block interface, compatible with traditional filesystems, but constraints are not those of desktop PC environments. EXT2/3/4, BTRFS, F2FS are the first of many solutions which come to mind, but how do they all compare? Typical queries include performance, longevity, tools availability, support, and power loss robustness. This presentation will not dive into implementation details but will instead summarize provided answers with the help of various figures and meaningful test results. 2 TABLE OF CONTENTS 1. Introduction 2. Block devices 3. Available filesystems 4. Performances 5. Tools 6. Reliability 7. Conclusion Filesystem considerations ABOUT THE AUTHOR • Tristan Lelong • Embedded software engineer @ Adeneo Embedded • French, living in the Pacific northwest • Embedded software, free software, and Linux kernel enthusiast. 4 Introduction Filesystem considerations Introduction INTRODUCTION More and more embedded designs rely on smart memory chips rather than bare NAND or NOR. This presentation will start by describing: • Some context to help understand the differences between NAND and MMC • Some typical requirements found in embedded devices designs • Potential filesystems to use on MMC devices 6 Filesystem considerations Introduction INTRODUCTION Focus will then move to block filesystems. How they are supported, what feature do they advertise. To help understand how they compare, we will present some benchmarks and comparisons regarding: • Tools • Reliability • Performances 7 Block devices Filesystem considerations Block devices MMC, EMMC, SD CARD Vocabulary: • MMC: MultiMediaCard is a memory card unveiled in 1997 by SanDisk and Siemens based on NAND flash memory. -

Recursive Updates in Copy-On-Write File Systems - Modeling and Analysis
2342 JOURNAL OF COMPUTERS, VOL. 9, NO. 10, OCTOBER 2014 Recursive Updates in Copy-on-write File Systems - Modeling and Analysis Jie Chen*, Jun Wang†, Zhihu Tan*, Changsheng Xie* *School of Computer Science and Technology Huazhong University of Science and Technology, China *Wuhan National Laboratory for Optoelectronics, Wuhan, Hubei 430074, China [email protected], {stan, cs_xie}@hust.edu.cn †Dept. of Electrical Engineering and Computer Science University of Central Florida, Orlando, Florida 32826, USA [email protected] Abstract—Copy-On-Write (COW) is a powerful technique recursive update. Recursive updates can lead to several for data protection in file systems. Unfortunately, it side effects to a storage system, such as write introduces a recursively updating problem, which leads to a amplification (also can be referred as additional writes) side effect of write amplification. Studying the behaviors of [4], I/O pattern alternation [5], and performance write amplification is important for designing, choosing and degradation [6]. This paper focuses on the side effects of optimizing the next generation file systems. However, there are many difficulties for evaluation due to the complexity of write amplification. file systems. To solve this problem, we proposed a typical Studying the behaviors of write amplification is COW file system model based on BTRFS, verified its important for designing, choosing, and optimizing the correctness through carefully designed experiments. By next generation file systems, especially when the file analyzing this model, we found that write amplification is systems uses a flash-memory-based underlying storage greatly affected by the distributions of files being accessed, system under online transaction processing (OLTP) which varies from 1.1x to 4.2x. -

F2punifycr: a Flash-Friendly Persistent Burst-Buffer File System
F2PUnifyCR: A Flash-friendly Persistent Burst-Buffer File System ThanOS Department of Computer Science Florida State University Tallahassee, United States I. ABSTRACT manifold depending on the workloads it is handling for With the increased amount of supercomputing power, applications. In order to leverage the capabilities of burst it is now possible to work with large scale data that buffers to the utmost level, it is very important to have a pose a continuous opportunity for exascale computing standardized software interface across systems. It has to that puts immense pressure on underlying persistent data deal with an immense amount of data during the runtime storage. Burst buffers, a distributed array of node-local of the applications. persistent flash storage devices deployed on most of Using node-local burst buffer can achieve scalable the leardership supercomputers, are means to efficiently write bandwidth as it lets each process write to the handling the bursty I/O invoked through cutting-edge local flash drive, but when the files are shared across scientific applications. In order to manage these burst many processes, it puts the management of metadata buffers, many ephemeral user level file system solutions, and object data of the files under huge challenge. In like UnifyCR, are present in the research and industry order to handle all the challenges posed by the bursty arena. Because of the intrinsic nature of the flash devices and random I/O requests by the Scientific Applica- due to background processing overhead, like Garbage tions running on leadership Supercomputing clusters, Collection, peak write bandwidth is hard to get. -
No Slide Title
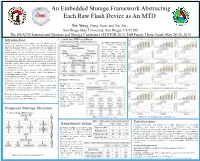
An Embedded Storage Framework Abstracting Each Raw Flash Device as An MTD Wei Wang, Deng Zhou, and Tao Xie, San Diego State University, San Diego, CA 92182 The 8th ACM International Systems and Storage Conference (SYSTOR 2015, Full Paper), Haifa, Israel, May 26-28, 2015 Introduction Our Design1: MTD Proxy Middleware mobile devices such as smart- phones and 3-D digital cameras The MTD proxy middleware has normally use raw flash memory device directly managed by an the following components: embedded flash file system, a dedicated file system designed for address mapping, access storing files on raw flash memory devices. Thus, in addition to queuing management, multiple provide normal file system functions and interface to up layer work thread layer, proxy system, flash file systems are also designed to directly control raw interface module, With the flash memory devices, they can address the inherent constraints of support of the four components, flash (e.g., wear out issue and the erase-before-write problem). the MTD proxy middleware Although existing embedded flash storage systems are effective for enables an existing flash file traditional mobile applications, they are becoming increasingly system to communicate with an inadequate for emerging data- intensive mobile applications due to array of MTD devices without the following limitations: no modifications of existing (1) Insufficient storage capacity: One of the most remarkable trends flash file systems, which is an of mobile computing is that emerging mobile applications are attractive feature for system creating huge volume of data. design and optimization. Figure 2. MTD Proxy Middleware. (2) Incompetent performance: current flash file system only supports serial IO access. -
Architecture and Performance of Perlmutter's 35 PB Clusterstor
Lawrence Berkeley National Laboratory Recent Work Title Architecture and Performance of Perlmutter’s 35 PB ClusterStor E1000 All-Flash File System Permalink https://escholarship.org/uc/item/90r3s04z Authors Lockwood, Glenn K Chiusole, Alberto Gerhardt, Lisa et al. Publication Date 2021-06-18 Peer reviewed eScholarship.org Powered by the California Digital Library University of California Architecture and Performance of Perlmutter’s 35 PB ClusterStor E1000 All-Flash File System Glenn K. Lockwood, Alberto Chiusole, Lisa Gerhardt, Kirill Lozinskiy, David Paul, Nicholas J. Wright Lawrence Berkeley National Laboratory fglock, chiusole, lgerhardt, klozinskiy, dpaul, [email protected] Abstract—NERSC’s newest system, Perlmutter, features a 35 1,536 GPU nodes 16 Lustre MDSes PB all-flash Lustre file system built on HPE Cray ClusterStor 1x AMD Epyc 7763 1x AMD Epyc 7502 4x NVIDIA A100 2x Slingshot NICs E1000. We present its architecture, early performance figures, 4x Slingshot NICs Slingshot Network 24x 15.36 TB NVMe and performance considerations unique to this architecture. We 200 Gb/s demonstrate the performance of E1000 OSSes through low-level 2-level dragonfly 16 Lustre OSSes 3,072 CPU nodes Lustre tests that achieve over 90% of the theoretical bandwidth 1x AMD Epyc 7502 2x AMD Epyc 7763 2x Slingshot NICs of the SSDs at the OST and LNet levels. We also show end-to-end 1x Slingshot NICs performance for both traditional dimensions of I/O performance 24x 15.36 TB NVMe (peak bulk-synchronous bandwidth) and non-optimal workloads endemic to production computing (small, incoherent I/Os at 24 Gateway nodes 2 Arista 7804 routers 2x Slingshot NICs 400 Gb/s/port random offsets) and compare them to NERSC’s previous system, 2x 200G HCAs > 10 Tb/s routing Cori, to illustrate that Perlmutter achieves the performance of a burst buffer and the resilience of a scratch file system. -

A Brief Introduction to the Design of UBIFS Document Version 0.1 by Adrian Hunter 27.3.2008
A Brief Introduction to the Design of UBIFS Document version 0.1 by Adrian Hunter 27.3.2008 A file system developed for flash memory requires out-of-place updates . This is because flash memory must be erased before it can be written to, and it can typically only be written once before needing to be erased again. If eraseblocks were small and could be erased quickly, then they could be treated the same as disk sectors, however that is not the case. To read an entire eraseblock, erase it, and write back updated data typically takes 100 times longer than simply writing the updated data to a different eraseblock that has already been erased. In other words, for small updates, in-place updates can take 100 times longer than out-of-place updates. Out-of-place updating requires garbage collection. As data is updated out-of-place, eraseblocks begin to contain a mixture of valid data and data which has become obsolete because it has been updated some place else. Eventually, the file system will run out of empty eraseblocks, so that every single eraseblock contains a mixture of valid data and obsolete data. In order to write new data somewhere, one of the eraseblocks must be emptied so that it can be erased and reused. The process of identifying an eraseblock with a lot of obsolete data, and moving the valid data to another eraseblock, is called garbage collection. Garbage collection suggests the benefits of node-structure. In order to garbage collect an eraseblock, a file system must be able to identify the data that is stored there. -

Monitoring Raw Flash Memory I/O Requests on Embedded Linux
Flashmon V2: Monitoring Raw NAND Flash Memory I/O Requests on Embedded Linux Pierre Olivier Jalil Boukhobza Eric Senn Univ. Europeenne de Bretagne Univ. Europeenne de Bretagne Univ. Europeenne de Bretagne Univ. Bretagne Occidentale, Univ. Bretagne Occidentale, Univ. Bretagne Sud, UMR6285, Lab-STICC, UMR6285, Lab-STICC, UMR6285, Lab-STICC, F29200 Brest, France, F29200 Brest, France, F56100 Lorient, France [email protected] [email protected] [email protected] ABSTRACT management mechanisms. One of these mechanisms is This paper presents Flashmon version 2, a tool for monitoring implemented by the Operating System (OS) in the form of embedded Linux NAND flash memory I/O requests. It is designed dedicated Flash File Systems (FFS). That solution is adopted in for embedded boards based devices containing raw flash chips. devices using raw flash chips on embedded boards, such as Flashmon is a kernel module and stands for "flash monitor". It smartphones, tablet PCs, set-top boxes, etc. Linux is a major traces flash I/O by placing kernel probes at the NAND driver operating system in such devices, and provides a wide support for level. It allows tracing at runtime the 3 main flash operations: several NAND flash memory models. In these devices the flash page reads / writes and block erasures. Flashmon is (1) generic as chip itself does not embed any particular controller. it was successfully tested on the three most widely used flash file This paper presents Flashmon version 2, a tool for monitoring systems that are JFFS2, UBIFS and YAFFS, and several NAND embedded Linux I/O operations on NAND secondary storage. -

UBI - Unsorted Block Images
UBI - Unsorted Block Images Thomas Gleixner Frank Haverkamp Artem Bityutskiy UBI - Unsorted Block Images by Thomas Gleixner, Frank Haverkamp, and Artem Bityutskiy Copyright © 2006 International Business Machines Corp. Revision History Revision v1.0.0 2006-06-09 Revised by: haver Release Version. Table of Contents 1. Document conventions...........................................................................................................................1 2. Introduction............................................................................................................................................2 UBI Volumes......................................................................................................................................2 Static Volumes ..........................................................................................................................2 Dynamic Volumes.....................................................................................................................3 3. MTD integration ....................................................................................................................................4 Simple partitioning.............................................................................................................................4 Complex partitioning .........................................................................................................................5 4. UBI design ..............................................................................................................................................6 -

Cross-Checking Semantic Correctness: the Case of Finding File System Bugs
Cross-checking Semantic Correctness: The Case of Finding File System Bugs Paper #171 Abstract 1. Introduction Today, systems software is too complex to be bug-free. To System software is buggy. It is often implemented in un- find bugs in systems software, developers often rely oncode safe languages (e.g., C) for achieving better performance or checkers, like Sparse in Linux. However, the capability of directly accessing the hardware, thereby facilitating the intro- existing tools used in commodity, large-scale systems is duction of tedious bugs. At the same time, it is also complex. limited to finding only shallow bugs that tend to be introduced For example, Linux consists of 17 millions lines of pure code by the simple mistakes of programmers and require no deep and accepts around 190 commits every day. understanding of code. Unfortunately, a majority of and To help this situation, researchers often use memory-safe difficult-to-find bugs are semantic ones, which violate high- languages in the first place. For example, Singularity [32] level rules or invariants (e.g., missing a permission check). uses C# and Unikernel [40] use OCaml for their OS develop- Thus, it is difficult for code-checking tools that lack the ment. However, in practice, developers usually rely on code understanding of a programmer’s true intention, to reason checkers. For example, Linux has integrated static code anal- about semantic correctness. ysis tools (e.g., Sparse) in its build process to detect common To solve this problem, we present JUXTA, a tool that au- coding errors (e.g., if system calls validate arguments that tomatically infers high-level semantics directly from source come from userspace).