Preparation of Papers for AIAA Technical Conferences
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Unit-1 Notes Faculty Name
SCHOOL OF AERONAUTICS (NEEMRANA) UNIT-1 NOTES FACULTY NAME: D.SUKUMAR CLASS: B.Tech AERONAUTICAL SUBJECT CODE: 7AN6.3 SEMESTER: VII SUBJECT NAME: MAINTENANCE OF AIRFRAME AND SYSTEMS DESIGN AIRFRAME CONSTRUCTION: Various types of structures in airframe construction, tubular, braced monocoque, semimoncoque, etc. longerons, stringers, formers, bulkhead, spars and ribs, honeycomb construction. Introduction: An aircraft is a device that is used for, or is intended to be used for, flight in the air. Major categories of aircraft are airplane, rotorcraft, glider, and lighter-than-air vehicles. Each of these may be divided further by major distinguishing features of the aircraft, such as airships and balloons. Both are lighter-than-air aircraft but have differentiating features and are operated differently. The concentration of this handbook is on the airframe of aircraft; specifically, the fuselage, booms, nacelles, cowlings, fairings, airfoil surfaces, and landing gear. Also included are the various accessories and controls that accompany these structures. Note that the rotors of a helicopter are considered part of the airframe since they are actually rotating wings. By contrast, propellers and rotating airfoils of an engine on an airplane are not considered part of the airframe. The most common aircraft is the fixed-wing aircraft. As the name implies, the wings on this type of flying machine are attached to the fuselage and are not intended to move independently in a fashion that results in the creation of lift. One, two, or three sets of wings have all been successfully utilized. Rotary-wing aircraft such as helicopters are also widespread. This handbook discusses features and maintenance aspects common to both fixed wing and rotary-wing categories of aircraft. -

THE BIRTH of the ATLANTIC AIRLINER Part Iva The
THE BIRTH OF THE ATLANTIC AIRLINER (1920-1940) by Rit Staalman Part IVa The Ultimate Propeller Airliner SUMMING UP: 1. Required for an Atlantic Airliner: Low Own Weight (airframe + engines), High Load Capacity, Low Drag. 2. Suitable building material: Dur-Aluminum (favourable weight/strength + durability); suitable construction method: Semi-monocoque, i.e. skin takes part of load. 3. Design:: make wings as small as possible = high wing loads (see earlier). 4. Small wings decrease weight, also lower drag. They require airplane to fly at high speed. (For the Atlantic this is good, because the plane often has to battle high head winds.) High air speed implies that good aerodynamic form is needed. It also implies that high power is needed, especially at take- off with full load. 5. Powerful,/light-weight engines become available in the 1930’s (see appendix). 6.The various flight regimes (take-off, climbing, cruising with different weights) require propellers with adjustable blade angles. These also appear on the market in the same period. So at the beginning of World War II all elements are available for the construction of practical Atlantic airliners. 1930: AMERICA GOES MONO AND METAL 1 1. Boeing Founded by millionaire William Edward Boeing (1881-1956) in 1916 in Seattle, the first aircraft produced by Boeing Aircraft Co.were two biplanes on floats. In 1929 Boeing became part of United Aircraft and Transport until 1934, when the U.S. government ruled that the combination of aircraft factories and airlines was against the anti-trust laws. Claire Egtvedt was chief engineer from the start. -

University of Oklahoma Graduate College Design and Performance Evaluation of a Retractable Wingtip Vortex Reduction Device a Th
UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE DESIGN AND PERFORMANCE EVALUATION OF A RETRACTABLE WINGTIP VORTEX REDUCTION DEVICE A THESIS SUBMITTED TO THE GRADUATE FACULTY In partial fulfillment of the requirements for the Degree of Master of Science Mechanical Engineering By Tausif Jamal Norman, OK 2019 DESIGN AND PERFORMANCE EVALUATION OF A RETRACTABLE WINGTIP VORTEX REDUCTION DEVICE A THESIS APPROVED FOR THE SCHOOL OF AEROSPACE AND MECHANICAL ENGINEERING BY THE COMMITTEE CONSISTING OF Dr. D. Keith Walters, Chair Dr. Hamidreza Shabgard Dr. Prakash Vedula ©Copyright by Tausif Jamal 2019 All Rights Reserved. ABSTRACT As an airfoil achieves lift, the pressure differential at the wingtips trigger the roll up of fluid which results in swirling wakes. This wake is characterized by the presence of strong rotating cylindrical vortices that can persist for miles. Since large aircrafts can generate strong vortices, airports require a minimum separation between two aircrafts to ensure safe take-off and landing. Recently, there have been considerable efforts to address the effects of wingtip vortices such as the categorization of expected wake turbulence for commercial aircrafts to optimize the wait times during take-off and landing. However, apart from the implementation of winglets, there has been little effort to address the issue of wingtip vortices via minimal changes to airfoil design. The primary objective of this study is to evaluate the performance of a newly proposed retractable wingtip vortex reduction device for commercial aircrafts. The proposed design consists of longitudinal slits placed in the streamwise direction near the wingtip to reduce the pressure differential between the pressure and the suction sides. -

Aeronautics National Advisory for Committee
AERONAUTICS SEVENTEENTH ANNUAL REPORT OF THE NATIONALADVISORY COMMITTEE FOR AERONAUTICS 1931 INCLUDING TECHNICAL REPORTS ~OS. 365 to 400 lJNI.~ STATES GOVERNMENTPRIN~G OFFIOE WASHINGTON: 1S82 Forde bytheSuperintendentof Documents,Waehlugton.D.C.---------- . Pricewxl(-sw2kram) LETTER OF SUBMITTAL .— To the Congress of the United Stutes: In compliance with the provisions of the act of March 3, 1915, establishing the National Advieory Committee for Aeronautics, I submit herewith the seventeenth annual report of the committee for the fiscal year ended June 30, 1931. It is noted from the committee’s report that the progress in aerodynamic development has been gratifying and that with recent notable additions to equipment the committee now has excellent facilities for the conduct of fuH-scale research on airphmes, propellers, and seaphme floats and hulls. Attention is invited to Part TTof the report presenting a summary of progress in the technical development of aircraft. With the steady improvement in the performance of aircraft, the relative importance of aviation increases as an agency of transportation and of natiomd defense. I cmcur in the committee’s opinion that the continuous prosecution of scientific research will provide the best assurance of further progress in the develop- ment of aircraft for aUpurposes. HERBERTHOOVER. THE TVHITEHOUSE, December 11, 1931. 111 LETTER OF TRANSMITTAL NATIONALADVISORYCOMMITTEEFOEAEROIiAKiTICS, Ta~hin@on, D. C., Nocember 17, 1931. hf E. PRESIDENT: In comphnce with the provisions of the act of Congress approved March 3, 1915 (U. S. C., title 50, sec. 163), I have the honor to transmit herewith the Seventeenth Annual Report of the National Advisory Committee for Aeronautics for the ikal year ended June 30, 1931. -

Electrically Heated Composite Leading Edges for Aircraft Anti-Icing Applications”
UNIVERSITY OF NAPLES “FEDERICO II” PhD course in Aerospace, Naval and Quality Engineering PhD Thesis in Aerospace Engineering “ELECTRICALLY HEATED COMPOSITE LEADING EDGES FOR AIRCRAFT ANTI-ICING APPLICATIONS” by Francesco De Rosa 2010 To my girlfriend Tiziana for her patience and understanding precious and rare human virtues University of Naples Federico II Department of Aerospace Engineering DIAS PhD Thesis in Aerospace Engineering Author: F. De Rosa Tutor: Prof. G.P. Russo PhD course in Aerospace, Naval and Quality Engineering XXIII PhD course in Aerospace Engineering, 2008-2010 PhD course coordinator: Prof. A. Moccia ___________________________________________________________________________ Francesco De Rosa - Electrically Heated Composite Leading Edges for Aircraft Anti-Icing Applications 2 Abstract An investigation was conducted in the Aerospace Engineering Department (DIAS) at Federico II University of Naples aiming to evaluate the feasibility and the performance of an electrically heated composite leading edge for anti-icing and de-icing applications. A 283 [mm] chord NACA0012 airfoil prototype was designed, manufactured and equipped with an High Temperature composite leading edge with embedded Ni-Cr heating element. The heating element was fed by a DC power supply unit and the average power densities supplied to the leading edge were ranging 1.0 to 30.0 [kW m-2]. The present investigation focused on thermal tests experimentally performed under fixed icing conditions with zero AOA, Mach=0.2, total temperature of -20 [°C], liquid water content LWC=0.6 [g m-3] and average mean volume droplet diameter MVD=35 [µm]. These fixed conditions represented the top icing performance of the Icing Flow Facility (IFF) available at DIAS and therefore it has represented the “sizing design case” for the tested prototype. -
I Principles of Dynamics
Reg.No: SNS College of Technology, Coimbatore-35. (Autonomous) B.E/B.Tech- Internal Assessment -II Academic Year 2019-2020 (ODD) B Eighth Semester Aeronautical Engineering 16AEOE1 - Basic Aeronautical Engineering Time: 11/2 Hours Maximum Marks: 50 Answer All Questions PART - A (5x 1 = 5Marks) 1. In NACA Four digit airfoil the last two digits indicates a) Maximum camber b) Maximum thickness c) Maximum lift co-efficient d) Position of Maximum Camber 2. If Mach number = 1, then the flow is called a) Sonic b) Subsonic c) Transonic d) Supersonic 3. In a Monocoque structure, the load is resisted by a) Stringer b) Skin c) Longerons d) Cowling 4. Young’s Modulus of Aluminum a) 50 GPa b) 70 GPa c) 100 GPa d) 200 GPa 5. Which one of the following material has strength to weight ratio very high a) Aluminum b) Steel c) Magnesium d) Composite 6. Define Drag and their types. A force acting on aero plan, which is parallel to the direction of relative wind a opposite to thrust direction under level flight. TYPES: Profile Drag, Skin Friction Drag, Interference drag, Form Drag 7. Explain Symmetric and unsymmetrical airfoils. • Symmetric : Upper and lower surfaces are mirror image, A mean 1 camber line is coincident with chord line. A symmetric airfoil will also have a just camber of Zero. • Unsymmetrical: An asymmetric airfoil for which the mean camber line will be above the chord line. 8. Define camber in an airfoil. Camber line: curved line from the leading edge to the trailing edge, which is equivalent between the upper surface and the lower surfaces of the airfoil. -
Design Study of a Supersonic Business Jet with Variable Sweep Wings
27TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES DESIGN STUDY OF A SUPERSONIC BUSINESS JET WITH VARIABLE SWEEP WINGS E.Jesse, J.Dijkstra ADSE b.v. Keywords: swing wing, supersonic, business jet, variable sweepback Abstract A design study for a supersonic business jet with variable sweep wings is presented. A comparison with a fixed wing design with the same technology level shows the fundamental differences. It is concluded that a variable sweep design will show worthwhile advantages over fixed wing solutions. 1 General Introduction Fig. 1 Artist impression variable sweep design AD1104 In the EU 6th framework project HISAC (High Speed AirCraft) technologies have been studied to enable the design and development of an 2 The HISAC project environmentally acceptable Small Supersonic The HISAC project is a 6th framework project Business Jet (SSBJ). In this context a for the European Union to investigate the conceptual design with a variable sweep wing technical feasibility of an environmentally has been developed by ADSE, with support acceptable small size supersonic transport from Sukhoi, Dassault Aviation, TsAGI, NLR aircraft. With a budget of 27.5 M€ and 37 and DLR. The objective of this was to assess the partners in 13 countries this 4 year effort value of such a configuration for a possible combined much of the European industry and future SSBJ programme, and to identify critical knowledge centres. design and certification areas should such a configuration prove to be advantageous. To provide a framework for the different studies and investigations foreseen in the HISAC This paper presents the resulting design project a number of aircraft concept designs including the relevant considerations which were defined, which would all meet at least the determined the selected configuration. -

Air Frame and Systems, Electrics, Powerplant and Emergency Equipments
Air Frame and Systems, Electrics, Powerplant and Emergency Equipments AirFrame and Systems – Fuselage What are the most frequent used materials in a monocoque or semi-monocoque structure? A) Steel. B) Aluminium or magnesium alloy. C) Wood. D) Composite fibres A framework of truss type fuselage is used in: A) Medium range commuter type turbo-props B) Heavy wide bodied subsonic turbo-fan aircraft C) Light training aircraft mainly D) Supersonic aircraft A semi-monocoque fuselage has... in the longitudinal direction. Together with the frames, they resist... moments and axial forces. The skin panels are loaded mainly in... A) Stringers, bending, shear. B) Stringers, bending, buckling. C) Bars, buckling, bending. D) Spars, torsion, shear. Aircraft structures consists mainly of: A) Light alloy steel sheets with copper rivets and titanium or steel materials at points requiring high strength. B) Magnesium alloy sheets with aluminium rivets and titanium or steel at points requiring high strength. C) Aluminium sheets and rivets with titanium or steel materials at points requiring high strength. D) Aluminium alloy sheets and rivets with titanium or steel materials at points requiring high strength. What is the purpose of the stringers? A) To produce stress risers. B) To absorb the torsional and compressive stresses. C) To support the primary control surfaces. D) To prevent buckling and bending by supporting and stiffening the skin. The primary purpose of the fuselage is to: A) Provide access to the cockpit. B) House the crew and payload. C) Support the wings. D) Keep out adverse weather. Fatigue life of the fuselage is mostly based on: A) Number of cycles at maximum differential. -
Pub Date Abstract
DOCUMENT RESUME ED 058 456 VT 014 597 TITLE Exploring in Aeronautics. An Introductionto Aeronautical Sciences. INSTITUTION National Aeronautics and SpaceAdministration, Cleveland, Ohio. Lewis Research Center. REPORT NO NASA-EP-89 PUB DATE 71 NOTE 398p. AVAILABLE FROMSuperintendent of Documents, U.S. GovernmettPrinting Office, Washington, D.C. 20402 (Stock No.3300-0395; NAS1.19;89, $3.50) EDRS PRICE MF-$0.65 HC-$13.16 DESCRIPTORS Aerospace Industry; *AerospaceTechnology; *Curriculum Guides; Illustrations;*Industrial Education; Instructional Materials;*Occupational Guidance; *Textbooks IDENTIFIERS *Aeronatics ABSTRACT This curriculum guide is based on a year oflectures and projects of a contemporary special-interestExplorer program intended to provide career guidance and motivationfor promising students interested in aerospace engineering and scientific professions. The adult-oriented program avoidstechnicality and rigorous mathematics and stresses real life involvementthrough project activity and teamwork. Teachers in high schoolsand colleges will find this a useful curriculum resource, w!th manytopics in various disciplines which can supplement regular courses.Curriculum committees, textbook writers and hobbyists will also findit relevant. The materials may be used at college level forintroductory courses, or modified for use withvocationally oriented high school student groups. Seventeen chapters are supplementedwith photographs, charts, and line drawings. A related document isavailable as VT 014 596. (CD) SCOPE OF INTEREST NOTICE The ERIC Facility has assigned this document for processing to tri In our judgement, thisdocument is also of interest to the clearing- houses noted to the right. Index- ing should reflect their special points of view. 4.* EXPLORING IN AERONAUTICS an introduction to Aeronautical Sciencesdeveloped at the NASA Lewis Research Center, Cleveland, Ohio. -

Feasibility Study of a Multi-Purpose Aircraft Concept with a Leading-Edge Cross-Flow Fan
Dissertations and Theses 5-2018 Feasibility Study of a Multi-Purpose Aircraft Concept with a Leading-Edge Cross-Flow Fan Stanislav Karpuk Follow this and additional works at: https://commons.erau.edu/edt Part of the Aerospace Engineering Commons Scholarly Commons Citation Karpuk, Stanislav, "Feasibility Study of a Multi-Purpose Aircraft Concept with a Leading-Edge Cross-Flow Fan" (2018). Dissertations and Theses. 399. https://commons.erau.edu/edt/399 This Thesis - Open Access is brought to you for free and open access by Scholarly Commons. It has been accepted for inclusion in Dissertations and Theses by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. FEASIBILITY STUDY OF A MULTI-PURPOSE AIRCRAFT CONCEPT WITH A LEADING-EDGE CROSS-FLOW FAN A Thesis Submitted to the Faculty of Embry-Riddle Aeronautical University by Stanislav Karpuk In Partial Fulfillment of the Requirements for the Degree of Master of Science in Aerospace Engineering May 2018 Embry-Riddle Aeronautical University Daytona Beach, Florida i ACKNOWLEDGMENTS I would like to thank Dr Gudmundsson and Dr Golubev for their knowledge, guidance and advising they provided during these two years of the program. I also would like to thank my committee member Dr Engblom for his advice and recommendations. I also want to thank Petr and Marina Kazarin for their support, help and the opportunity to enjoy the Russian community for those two years. This project would not be possible without strong computational power available in ERAU, so I would like to thank all staff and faculty who contributed to development and support of the VEGA cluster. -
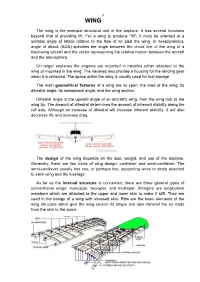
The Wing Is the Principal Structural Unit of the Airplane. It Has Several Functions Beyond That of Providing Lift. for a Wing To
1 WING The wing is the principal structural unit of the airplane. It has several functions beyond that of providing lift. For a wing to produce "lift", it must be oriented at a suitable angle of attack relative to the flow of air past the wing. In aerodynamics, angle of attack (AOA) specifies the angle between the chord line of the wing of a fixed-wing aircraft and the vector representing the relative motion between the aircraft and the atmosphere. On larger airplanes the engines are mounted in nacelles either attached to the wing or mounted in the wing. The nacelles also provide a housing for the landing gear when it is retracted. The space within the wing is usually used for fuel storage. The main geometrical features of a wing are its span; the area of the wing; its dihedral angle; its sweepback angle; and the wing section. Dihedral angle is the upward angle of an aircraft's wing, from the wing root to the wing tip. The amount of dihedral determines the amount of inherent stability along the roll axis. Although an increase of dihedral will increase inherent stability, it will also decrease lift, and increase drag. The design of the wing depends on the size, weight, and use of the airplane. Generally, there are two kinds of wing design: cantilever and semi-cantilever. The semi-cantilever usually has one, or perhaps two, supporting wires or struts attached to each wing and the fuselage. As far as the internal structure is concerned, there are three general types of conventional wings: monospar, two-spar, and multispar. -

Of Light Aircraft
I I I , 1 NASA CONTRACTOR ~ i REPORT I Id 00 lb c t OL U * vb 4 z A STUDY OF NACAAND NASA PUBLISHED INFORMATION OF PERTINENCE IN THE DESIGN OF LIGHT AIRCRAFT Volume I - Structures by Fredm-ck 0. Smetma Prepared by NORTH CAROLINA STATE UNIVERSITY Raleigh, N. C. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON,D. C. A STUDY OF NACA AND NASA PUBLISHED INFOR.MATION OF PERTINENCE IN THE DESIGN OF LIGHT AIRCRAFT Volume I - Structures By Frederick 0. Smetana Distribution of this report is provided in the interestof information exchange. Responsibility for the contents resides in the author or organization that prepared it. Prepared under Contract No. 1-7265 by DEPARTMENT OF MECHANICAL AND AEROSPACE ENGINEERJNG NORTH CAROLINA STATE UNIVERSITY Raleigh, N.C. for Langley Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical information Springfield, Virginia 22151 - Price $3.00 Acknowledgements Examination will show that the preparation of this report involved a great many lengthyeditorial tasks. Many figures were prepared,reports had tobe secured, account kept of thosereviewed, typescript' proofread, etc. Mr. Delbert C. Summey was principallyresponsible for these functions. His contribution is herewith gratefully acknowledged. Mr- Joseph W. Stickle of theLangley Research Center, who acted as technical monitor, mademany valuable suggestions relative to' the conduct of the work. His contribution is also acknowledged. iii "--_ Table of Contents Page GeneralIntroduction ........................... 1 GeneralConclusions ........................... 4 A Study of NACA and NASA Published Information of Pertinence inthe Designand Construction of Light Aircraft Structures ...... 6 Appendix ................................