Digital & Analog Transmission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Digital Transmission 01204325 Data Communications and Computer Networks
Digital Transmission 01204325 Data Communications and Computer Networks Chaiporn Jaikaeo Department of Computer Engineering Kasetsart University Based on lecture materials from Data Communications and Networking, 5th ed., Behrouz A. Forouzan, McGraw Hill, 2012. Revised 2021-05-07 Outline • Line coding • Encoding considerations • DC components in signals • Synchronization • Various line coding methods • Analog to digital conversion 2 Line Coding • Process of converting binary data to digital signal 3 Signal vs. Data Elements 1 data element = 1 symbol 4 Encoding Considerations • Signal spectrum ◦ Lack of DC components ◦ Lack of high frequency components • Clocking/synchronization • Error detection • Noise immunity • Cost and complexity 5 DC Components • DC components in signals are not desirable ◦ Cannot pass thru certain devices ◦ Leave extra (useless) energy on the line ◦ Voltage built up due to stray capacitance in long cables v Signal with t DC component v Signal without t DC component 6 Synchronization • To correctly decode a signal, receiver and sender must agree on bit interval 0 1 0 0 1 1 0 1 Sender sends: v 01001101 t 0 1 0 0 0 1 1 0 1 1 Receiver sees: v 0100011011 t 7 Providing Synchronization • Separate clock wire Sender data Receiver clock • Self-synchronization 0 1 0 0 1 1 0 1 v t 8 Line Coding Methods • Unipolar ◦ Uses only one voltage level (one side of time axis) • Polar ◦ Uses two voltage levels (negative and positive) ◦ E.g., NRZ, RZ, Manchester, Differential Manchester • Bipolar ◦ Uses three voltage levels (+, 0, and -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -

Bit & Baud Rate
What’s The Difference Between Bit Rate And Baud Rate? Apr. 27, 2012 Lou Frenzel | Electronic Design Serial-data speed is usually stated in terms of bit rate. However, another oft- quoted measure of speed is baud rate. Though the two aren’t the same, similarities exist under some circumstances. This tutorial will make the difference clear. Table Of Contents Background Bit Rate Overhead Baud Rate Multilevel Modulation Why Multiple Bits Per Baud? Baud Rate Examples References Background Most data communications over networks occurs via serial-data transmission. Data bits transmit one at a time over some communications channel, such as a cable or a wireless path. Figure 1 typifies the digital-bit pattern from a computer or some other digital circuit. This data signal is often called the baseband signal. The data switches between two voltage levels, such as +3 V for a binary 1 and +0.2 V for a binary 0. Other binary levels are also used. In the non-return-to-zero (NRZ) format (Fig. 1, again), the signal never goes to zero as like that of return- to-zero (RZ) formatted signals. 1. Non-return to zero (NRZ) is the most common binary data format. Data rate is indicated in bits per second (bits/s). Bit Rate The speed of the data is expressed in bits per second (bits/s or bps). The data rate R is a function of the duration of the bit or bit time (TB) (Fig. 1, again): R = 1/TB Rate is also called channel capacity C. If the bit time is 10 ns, the data rate equals: R = 1/10 x 10–9 = 100 million bits/s This is usually expressed as 100 Mbits/s. -

Multilevel Sequences and Line Codes
COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION o Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. o NonCommercial — You may not use the material for commercial purposes. o ShareAlike — If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original. How to cite this thesis Surname, Initial(s). (2012) Title of the thesis or dissertation. PhD. (Chemistry)/ M.Sc. (Physics)/ M.A. (Philosophy)/M.Com. (Finance) etc. [Unpublished]: University of Johannesburg. Retrieved from: https://ujdigispace.uj.ac.za (Accessed: Date). MULTILEVEL SEQUENCES AND LINE CODES by LOUIS BOTHA Thesis submitted as partial fulfilment of the requirements for the degree MASTER OF ENGINEERING in ELECTRICAL AND ELECTRONIC ENGINEERING in the FACULTY OF ENGINEERING at the RAND AFRIKAANS UNIVERSITY SUPERVISOR: PROF HC FERREIRA MAY 1991 SUMMARY As the demand for high-speed data communications over conventional channels such as coaxial cables and twisted pairs grows, it becomes neccesary to optimize every aspect of the communication system at reasonable cost to meet this demand effectively. The choice of a line code is one of the most important aspects in the design of a communications system, as the line code determines the complexity, and thus also the cost, of several circuits in the system. It has become known in recent years that a multilevel line code is preferable to a binary code in cases where high-speed communications are desired. -
Spectral Management on Metallic Access Networks; Part 1: Definitions and Signal Library 2 ETSI TR 101 830-1 V1.2.1 (2001-08)
ETSI TR 101 830-1 V1.2.1 (2001-08) Technical Report Transmission and Multiplexing (TM); Access networks; Spectral management on metallic access networks; Part 1: Definitions and signal library 2 ETSI TR 101 830-1 V1.2.1 (2001-08) Reference RTR/TM-06020-1 Keywords spectral management, unbundling, access, network, local loop, transmission, modem, POTS, IDSN, ADSL, HDSL, SDSL, VDSL, xDSL ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.:+33492944200 Fax:+33493654716 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://www.etsi.org/tb/status/ If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. -
The Three Myths of Optical Capacity Scaling How to Maximize and Monetize Subsea Cable Capacity
WHITE PAPER The Three Myths of Optical Capacity Scaling How to Maximize and Monetize Subsea Cable Capacity MYTH 1 Scaling BAUD RATE increases spectral efficiency, thereby increasing total subsea fiber capacity MYTH 2 Scaling MODULATION ORDER increases spectral efficiency, thereby increasing total subsea fiber capacity MYTH 3 Scaling INTEGRATION has no effect on spectral efficiency or subsea fiber capacity AXES OF SCALABILITY Capacity/wave Capacity/device Baud G/Wave 100 Gbaud 800 Gb/s+ 2.4 Tb/s 600 Gb/s 66 Gbaud 1.2 Tb/s 200 Gb/s 500 Gb/s 33 Gbaud 100 Gb/s Modulation Fiber capacity 6 Carrier SC 1.2 @ 16QAM QPSK 8QAM 16QAM 237.5 GHz 64QAM CS-64QAM Multi-channel Super-channel Gb/s/unit FigureFigure 1: 1: Three The Three axes Axes of opticalof Optical scalability Scaling The Three Axes of Optical Scaling Figure 1 shows the three axes that are needed for optical scaling—baud rate, modulation order and integration. This paper will discuss scaling along each of these axes, but it is important to clarify exactly what is being scaled. There are at least three interpretations: • Increasing the data rate per wavelength • Increasing the capacity per line card or appliance • Increasing the total fiber capacity, or spectral efficiency These can potentially be scaled independently, or in concert as transponder technology evolves. In subsea deployments total fiber capacity, or spectral efficiency, is usually the dominant factor in determining overall network economics, so it becomes extremely important to understand the most effective way to achieve total capacity, especially when scaling baud rate has become a focal point for many dense wavelength-division multiplexing (DWDM) vendors today. -
Quadrature Amplitude Modulation (QAM) Or Amplitude Phase Shift Keying (APSK) S(T ) = a Sin(2Π F T + )
ΕΠΛ 427: ΚΙΝΗΤΑ ΔΙΚΤΥΑ ΥΠΟΛΟΓΙΣΤΩΝ (MOBILE NETWORKS) Δρ. Χριστόφορος Χριστοφόρου Πανεπιστήμιο Κύπρου - Τμήμα Πληροφορικής Modulation Techniques (Τεχνικές Διαμόρφωσης) Recall (Process and Elements of Radio Transmission) 1 Modulation Demodulation Topics Discussed 2 Digital Modulation Bit rate, Baud rate Basic Digital Modulation Techniques (ASK, FSK, PSK, QAM) Constellation diagrams Factors that influence the choice of Digital Modulation Scheme – Power Efficiency, Bandwidth Efficiency Modulation 3 Message Signal (Data to be transmitted) Carrier signal with frequency fc Controlling the Amplitude of the carrier signal (ASK) Controlling the Frequency of the carrier signal (FSK) Controlling the Phase of the Modulated Signals Modulated carrier signal (PSK) Analog and Digital Signals Αναλογικά και Ψηφιακά Σήματα 4 Means by which data are propagated over a medium (Οι τρόποι με τους οποίους τα δεδομένα διαδίδονται μέσω κάποιου μέσου). An Analog Signal is a continuously varying electromagnetic wave (ένα συνεχόμενο εναλλασσόμενο ηλεκτρομαγνητικό κύμα) that may be propagated over a variety of media: Wire, fiber optic, coaxial, space (wireless) A digital signal is a sequence of discrete voltage pulses (είναι μια αλληλουχία διακριτών παλμών τάσης) that can be transmitted over a wire medium: E.g., a constant positive level of voltage to represent bit 1 and a constant negative level to represent bit 0. Modulation for Wireless Digital Modulation 5 Digital modulation is the process by which an analog carrier wave is modulated to include a discrete (digital) signal. (Ψηφιακή διαμόρφωση είναι η διαδικασία κατά την οποία ένας μεταφορέας αναλογικού σήματος διαμορφώνεται έτσι ώστε να συμπεριλάβει ένα διακριτό (ψηφιακό) σήμα (π.χ., 1 or 0)) Digital modulation methods can be considered as Digital-to- Analog conversion, and the corresponding Demodulation (e.g., at the Receiver) as Analog-to-Digital conversion. -
Digital Data Transmission Unit 3
Unit 3 Digital Data Transmission What is Line Coding? The input to a digital system is in the form of sequence of digits. The input can be from the sources such as data set, computer, digitized voice (PCM), digitalTV orTelemetry equipment. Line coding is the process in which the digital input is coded into electrical pulses or waveforms for the transmission over channel. Regenerative Repeaters are used at regular intervals along a digital transmission line to detect the incoming digital signal and to transmit the new clean pulse for the further transmission along the line. Line Coding Line Coding There are many ways of assigning pulses (waveforms) to the digital data. For example a high voltage level (+V) could represent a “1” and a low voltage level (0 or -V) could represent a “0”. Line Coding-Examples Line Coding Signal element versus Data element Data element (1s & 0s) are what we need to send and signal elements (+V & -V voltages) are what we can send. Data elements are being carried and signal elements are the carriers. The data rate defines the number of bits sent per sec - bps. It is often referred to the bit rate. The signal rate is the number of signal elements sent in a second and is measured in bauds. Line Coding Line Coding Requirements Small transmission bandwidth Power efficiency: as small as possible for required data rate and error probability Error detection/correction Timing information: clock must be extracted from data Transparency: all possible binary sequences can be transmitted. LINE CODING Unipolar NRZ All signal levels are on one side of the time axis - either above or below. -
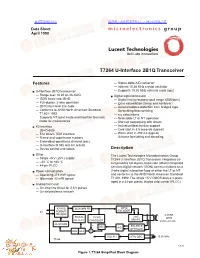
T7264 U-Interface 2B1Q Transceiver
查询T7264供应商 捷多邦,专业PCB打样工厂,24小时加急出货 Data Sheet April 1998 T7264 U-Interface 2B1Q Transceiver Features — Sigma-delta A/D converter — Internal 15.36 MHz crystal oscillator ■ U-interface 2B1Q transceiver — Supports 15.36 MHz external clock input — Range over 18 kft on 26 AWG ■ Digital signal processor — ISDN basic-rate 2B+D — Digital timing recovery (pull range ±250 ppm) — Full-duplex, 2-wire operation — Echo cancellation (linear and nonlinear) — 2B1Q four-level line code — Accommodates distortion from bridged taps — Conforms to ANSI North American Standard — Scrambling/descrambling T1.601-1992 — crc calculations — Supports NT quiet mode and insertion loss test — Selectable LT or NT operation mode for maintenance — Start-up sequencing with timers ■ K2 interface — Activation/deactivation support — 2B+D data — Cold start in 3.5 seconds (typical) — 512 kbits/s TDM interface — Warm start in 200 ms (typical) — Frame and superframe markers — U-frame formatting and decoding — Embedded operations channel (eoc) — U-interface M bits and crc results — Device control and status Description ■ Other The Lucent Technologies Microelectronics Group ± — Single +5 V ( 5%) supply T7264 U-Interface 2B1Q Transceiver integrated cir- ° ° — –40 C to +85 C cuit provides full-duplex, basic-rate (2B+D) integrated — 44-pin PLCC services digital network (ISDN) communications on a ■ Power consumption 2-wire digital subscriber loop at either the LT or NT — Operating 275 mW typical and conforms to the ANSI North American Standard — Idle mode 30 mW typical T1.601-1992. The single +5 V CMOS device is pack- aged in a 44-pin plastic leaded chip carrier (PLCC). ■ Analog front end — On-chip line driver for 2.5 V pulses — On-chip balance network K2 BUS SCRAMBLER 2B1Q ENCODER K2 FORMAT, DECODE 2-WIRE LINE SIGNAL ECHO 2B1Q DRIVER DETECT CANCELER U-INTERFACE DESCRAM. -
De-Mystifying Spectral Compatibility of Bonded Copper Systems - Why DMT Is Superior to SHDSL
White Paper De-Mystifying Spectral Compatibility of Bonded Copper Systems - Why DMT is Superior to SHDSL July 2010 Copyright © 2010 Positron Access Solutions, Inc. All rights reserved. Information in this document is subject to change without notice. Doc#: WP-2001-0710 White Paper: De-Mystifying Spectral Compatibility Table of Contents Abstract ....................................................................................... 3 Introduction ................................................................................. 4 The Basic Mechanism of Spectral Impact .................................. 6 Legacy HDSL/SHDSL Systems Confined by Overlap Spectra Design ...................................................................... 7 DMT’s Simplicity, Performance and Predictability Mitigate It’s Impact on ADSL/ADSL2+ ....................................................... 10 Why Enhanced SHDSL also Falls Short ..................................... 13 Proving it with Numbers – Data Supporting DMT’s Superiority .. 16 Conclusion ................................................................................... 19 References ................................................................................... 20 Doc#: WP-2001-0710 2 White Paper: De-Mystifying Spectral Compatibility Abstract This paper compares the spectral impact of symmetric DMT and SHDSL systems and provides clear evidence as to why DMT systems provide superior spectral compatibility, especially when they’re enhanced with MIMO on DMT functionality. It discusses the major -
Multiplexing with NMEA 0183 You Don’T Need State-Of-The-Art Gear to Build a Cost-Effective Onboard Network
ELECTRONICS The MiniPlex Lite multiplexer allows you to link wind instruments (above) and AIS data (right) to your computer. Multiplexing with NMEA 0183 You don’t need state-of-the-art gear to build a cost-effective onboard network. n the last three years, PS has looked autopilots, wind sensors, Automatic NMEA 0183 PRIMER Iat several ways to integrate per- Identification System (AIS) devices, NMEA 0183 is a serial protocol nor- sonal computers into our navigation etc.—still use it to communicate. New mally transmitting at 4,800 baud. For routine. In July 2006, we looked at and expensive devices meeting the comparison, this is about one-tenth of building a custom mini-computer for NMEA 2000 standard (see “Market the speed of a basic dial-up Internet onboard duties. In September 2006, Notes,” page 29) are readily available, connection. we carried out a broad review of nav but in the spirit of doing more with NMEA 0183 is based on the Elec- software with several updates in 2007 less, this article looks at ways we can tronic Industry Association’s RS-422 and 2008. get the most of our existing electronic standard, a close cousin of the RS-232 This is a fast-moving target, and equipment. standard. RS-422 uses differential several recent technological advances When it comes time to add more voltages while RS-232 is single-ended. are changing the playing field. The sensors to your navigation system This means that RS-422 is much more mainstream introduction of solid (such as an AIS unit) or integrate your resistant to electrical noise and can state memory (no more spinning hard PC into the system, making connec- transmit over much longer wire runs. -

Data Encodingencoding
ChapterChapter 3:3: DataData EncodingEncoding Raj Jain Professor of CIS The Ohio State University Columbus, OH 43210 [email protected] http://www.cis.ohio-state.edu The Ohio State University Raj Jain 3-1 Overview q Coding design consideration q Codes for q digital data to digital signal q Digital data, analog signal q Analog signal, digital data q Analog signal, analog data The Ohio State University Raj Jain 3-2 Coding Terminology Pulse +5V +5V 0 0 Bit -5V -5V q Signal element: Pulse q Unipolar: All positive or All negative voltage q Bipolar: Positive and negative voltage q Mark/Space: 1 or 0 q Modulation Rate: 1/Duration of the smallest element =Baud rate q Data Rate: Bits per second q Data Rate = Fn(Bandwidth, signal/noise ratio, encoding) The Ohio State University Raj Jain 3-3 Coding Design Bits 0100011100000 +5V NRZ 0 -5V Clock Manchester NRZI q Pulse width indeterminate: Clocking q DC, Baseline wander q No line state information q No error detection/protection q No control signals q High bandwidth q Polarity mix-up ⇒ Differential (compare polarity) The Ohio State University Raj Jain 3-4 Digital Signal Encoding Formats The Ohio State University Figure3.2 Raj Jain 3-5 Digital Signal Encoding Formats q Nonreturn-to-Zero-Level (NRZ-L) 0= high level 1= low level q Nonreturn to Zero Inverted (NRZI) 0= no transition at beginning of interval (one bit time) 1= transition at beginning of interval q Bipolar-AMI 0=no line signal 1= positive or negative level,alternating for successive ones The Ohio State University Raj Jain 3-6 Encoding Formats (Cont)