Chapter 4 Digital Transmission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Digital Transmission 01204325 Data Communications and Computer Networks
Digital Transmission 01204325 Data Communications and Computer Networks Chaiporn Jaikaeo Department of Computer Engineering Kasetsart University Based on lecture materials from Data Communications and Networking, 5th ed., Behrouz A. Forouzan, McGraw Hill, 2012. Revised 2021-05-07 Outline • Line coding • Encoding considerations • DC components in signals • Synchronization • Various line coding methods • Analog to digital conversion 2 Line Coding • Process of converting binary data to digital signal 3 Signal vs. Data Elements 1 data element = 1 symbol 4 Encoding Considerations • Signal spectrum ◦ Lack of DC components ◦ Lack of high frequency components • Clocking/synchronization • Error detection • Noise immunity • Cost and complexity 5 DC Components • DC components in signals are not desirable ◦ Cannot pass thru certain devices ◦ Leave extra (useless) energy on the line ◦ Voltage built up due to stray capacitance in long cables v Signal with t DC component v Signal without t DC component 6 Synchronization • To correctly decode a signal, receiver and sender must agree on bit interval 0 1 0 0 1 1 0 1 Sender sends: v 01001101 t 0 1 0 0 0 1 1 0 1 1 Receiver sees: v 0100011011 t 7 Providing Synchronization • Separate clock wire Sender data Receiver clock • Self-synchronization 0 1 0 0 1 1 0 1 v t 8 Line Coding Methods • Unipolar ◦ Uses only one voltage level (one side of time axis) • Polar ◦ Uses two voltage levels (negative and positive) ◦ E.g., NRZ, RZ, Manchester, Differential Manchester • Bipolar ◦ Uses three voltage levels (+, 0, and -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -

An Efficient Utilization of Power Spectrum Density for Smart Cities
sensors Article Moving towards IoT Based Digital Communication: An Efficient Utilization of Power Spectrum Density for Smart Cities Tariq Ali 1,*, Abdullah S. Alwadie 1, Abdul Rasheed Rizwan 2, Ahthasham Sajid 3 , Muhammad Irfan 1 and Muhammad Awais 4 1 Electrical Engineering Department, College of Engineering, Najran University, Najran 61441, Saudi Arabia; [email protected] (A.S.A.); [email protected] (M.I.) 2 Department of Computer Science, Punjab Education System, Depaalpur 56180, Pakistan; [email protected] 3 Department of Computer Science, Faculty of ICT, Balochistan University of Information Technology Engineering and Management Sciences, Quetta 87300, Pakistan; [email protected] 4 School of Computing and Communications, Lancaster University, Bailrigg, Lancaster LA1 4YW, UK; [email protected] * Correspondence: [email protected] Received: 8 April 2020; Accepted: 14 May 2020; Published: 18 May 2020 Abstract: The future of the Internet of Things (IoT) is interlinked with digital communication in smart cities. The digital signal power spectrum of smart IoT devices is greatly needed to provide communication support. The line codes play a significant role in data bit transmission in digital communication. The existing line-coding techniques are designed for traditional computing network technology and power spectrum density to translate data bits into a signal using various line code waveforms. The existing line-code techniques have multiple kinds of issues, such as the utilization of bandwidth, connection synchronization (CS), the direct current (DC) component, and power spectrum density (PSD). These highlighted issues are not adequate in IoT devices in smart cities due to their small size. -

Multilevel Sequences and Line Codes
COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION o Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. o NonCommercial — You may not use the material for commercial purposes. o ShareAlike — If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original. How to cite this thesis Surname, Initial(s). (2012) Title of the thesis or dissertation. PhD. (Chemistry)/ M.Sc. (Physics)/ M.A. (Philosophy)/M.Com. (Finance) etc. [Unpublished]: University of Johannesburg. Retrieved from: https://ujdigispace.uj.ac.za (Accessed: Date). MULTILEVEL SEQUENCES AND LINE CODES by LOUIS BOTHA Thesis submitted as partial fulfilment of the requirements for the degree MASTER OF ENGINEERING in ELECTRICAL AND ELECTRONIC ENGINEERING in the FACULTY OF ENGINEERING at the RAND AFRIKAANS UNIVERSITY SUPERVISOR: PROF HC FERREIRA MAY 1991 SUMMARY As the demand for high-speed data communications over conventional channels such as coaxial cables and twisted pairs grows, it becomes neccesary to optimize every aspect of the communication system at reasonable cost to meet this demand effectively. The choice of a line code is one of the most important aspects in the design of a communications system, as the line code determines the complexity, and thus also the cost, of several circuits in the system. It has become known in recent years that a multilevel line code is preferable to a binary code in cases where high-speed communications are desired. -

4.1 DIGITAL-TO-DIGITAL CONVERSION in Chapter 3, We Discussed Data and Signals
A computer network is designed to send information from one point to another. This information needs to be converted to either a digital signal or an analog signal for trans• mission. In this chapter, we discuss the first choice, conversion to digital signals; in Chapter 5, we discuss the second choice, conversion to analog signals. We discussed the advantages and disadvantages of digital transmission over analog transmission in Chapter 3. In this chapter, we show the schemes and techniques that we use to transmit data digitally. First, we discuss digital-to-digital conversion tech• niques, methods which convert digital data to digital signals. Second, we discuss analog- to-digital conversion techniques, methods which change an analog signal to a digital signal. Finally, we discuss transmission modes. 4.1 DIGITAL-TO-DIGITAL CONVERSION In Chapter 3, we discussed data and signals. We said that data can be either digital or analog. We also said that signals that represent data can also be digital or analog. In this section, we see how we can represent digital data by using digital signals. The conver• sion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Line Coding Line coding is the process of converting digital data to digital signals. We assume that data, in the form of text, numbers, graphical images, audio, or video, are stored in com• puter memory as sequences of bits (see Chapter 1). Line coding converts a sequence of bits to a digital signal. At the sender, digital data are encoded into a digital signal; at the receiver, the digital data are recreated by decoding the digital signal. -
Spectral Management on Metallic Access Networks; Part 1: Definitions and Signal Library 2 ETSI TR 101 830-1 V1.2.1 (2001-08)
ETSI TR 101 830-1 V1.2.1 (2001-08) Technical Report Transmission and Multiplexing (TM); Access networks; Spectral management on metallic access networks; Part 1: Definitions and signal library 2 ETSI TR 101 830-1 V1.2.1 (2001-08) Reference RTR/TM-06020-1 Keywords spectral management, unbundling, access, network, local loop, transmission, modem, POTS, IDSN, ADSL, HDSL, SDSL, VDSL, xDSL ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.:+33492944200 Fax:+33493654716 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice Individual copies of the present document can be downloaded from: http://www.etsi.org The present document may be made available in more than one electronic version or in print. In any case of existing or perceived difference in contents between such versions, the reference version is the Portable Document Format (PDF). In case of dispute, the reference shall be the printing on ETSI printers of the PDF version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://www.etsi.org/tb/status/ If you find errors in the present document, send your comment to: [email protected] Copyright Notification No part may be reproduced except as authorized by written permission. The copyright and the foregoing restriction extend to reproduction in all media. -
UNIT: 3 Digital and Analog Transmission
UNIT: 3 Digital and Analog Transmission DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Figure 5.1 shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. When we vary anyone of these characteristics, we create a different version of that wave. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Aspects of Digital-to-Analog Conversion Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Data Element Versus Signal Element Data element is the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Data Rate Versus Signal Rate We can define the data rate (bit rate) and the signal rate (baud rate). The relationship between them is S= N/r baud where N is the data rate (bps) and r is the number of data elements carried in one signal element. The value of r in analog transmission is r =log2 L, where L is the type of signal element, not the level. Carrier Signal In analog transmission, the sending device produces a high-frequency signal that acts as a base for the information signal. -

Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission
IOSR Journal of Engineering (IOSRJEN) www.iosrjen.org ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 05, Issue 02 (February. 2015), ||V4|| PP 33-36 Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission Amna mohammed Elzain1,Abdelrasoul Jabar Alzubaidi2 Alazhery University- Engineering college Sudan University of Science and technology –Engineering College- Electronics Engineering School Abstract: - Line encoding is the method used to represent the digital information on the media. A pattern, that uses either voltage or current, is used to represent the 1s and 0s of the digital signal on the transmission link. Common types of line encoding methods used in data communications are: Unipolar line encoding, Polar line encoding, Bipolar line encoding and Manchester line encoding. This paper deals with the design of bipolar digital to digital encoding (RZ) data transmission using latch SN 74373, darlington amplifier ULN 2003-500 m A, solid state relay, personnel computer and Turbo C++ programming language ). Keywords: - Bipolar, Encoding, Digital to Digital, Latch SN 74373, Darlington Amplifier ULN 2003-500 m A, Solid State Relay (SSR) ,Turbo C++ , Computer. I. INTRODUCTION A computer network is used for communication of data from one station to another station in the network [1]. Data and signals are two of the basic building blocks of any computer network. Data must be encoded into signals before it can be transported across communication media [2]. Encoding means conversion of data into bit stream [3]. There are different encoding schemes available: Analog-to-Digital Digital-to-Analog Analog-to-Analog Digital-to-Digital Digital-to-Digital Digital-to-Digital encoding is the representation of digital information by a digital signal . -
Digital Data Transmission Unit 3
Unit 3 Digital Data Transmission What is Line Coding? The input to a digital system is in the form of sequence of digits. The input can be from the sources such as data set, computer, digitized voice (PCM), digitalTV orTelemetry equipment. Line coding is the process in which the digital input is coded into electrical pulses or waveforms for the transmission over channel. Regenerative Repeaters are used at regular intervals along a digital transmission line to detect the incoming digital signal and to transmit the new clean pulse for the further transmission along the line. Line Coding Line Coding There are many ways of assigning pulses (waveforms) to the digital data. For example a high voltage level (+V) could represent a “1” and a low voltage level (0 or -V) could represent a “0”. Line Coding-Examples Line Coding Signal element versus Data element Data element (1s & 0s) are what we need to send and signal elements (+V & -V voltages) are what we can send. Data elements are being carried and signal elements are the carriers. The data rate defines the number of bits sent per sec - bps. It is often referred to the bit rate. The signal rate is the number of signal elements sent in a second and is measured in bauds. Line Coding Line Coding Requirements Small transmission bandwidth Power efficiency: as small as possible for required data rate and error probability Error detection/correction Timing information: clock must be extracted from data Transparency: all possible binary sequences can be transmitted. LINE CODING Unipolar NRZ All signal levels are on one side of the time axis - either above or below. -

M-Ary Aggregate Spread Pulse Modulation in Lpwans for Iot Applications
M-ary Aggregate Spread Pulse Modulation in LPWANs for IoT applications Alexei V. Nikitin Ruslan L. Davidchack Nonlinear LLC Sch. of Mathematics and Actuarial Sci., Wamego, Kansas, USA U. of Leicester, Leicester, UK E-mail: [email protected] E-mail: [email protected] Abstract—In low-power wide-area networks (LPWANs), various However, the designed pulse train Gˆ»:¼ given by (1) can be trade-offs among the bandwidth, data rates, and energy per bit “re-shaped” by linear filtering: have different effects on the quality of service under different ∑︁ propagation conditions (e.g. fading and multipath), interference G »:¼ = ¹Gˆ ∗ 6ˆº»:¼ = 퐴9 6ˆ»: −:9 ¼ , (3) scenarios, multi-user requirements, and design constraints. Such 9 compromises, and the manner in which they are implemented, fur- where 6ˆ»:¼ is the impulse response of the filter and the asterisk ther affect other technical aspects, such as system’s computational denotes convolution. The filter 6ˆ»:¼ can be, for example, a complexity and power efficiency. At the same time, this difference lowpass filter with a given bandwidth 퐵. If the filter 6ˆ»:¼ has a in trade-offs also adds to the technical flexibility in addressing a broader range of IoT applications. This paper addresses a sufficiently large time-bandwidth product (TBP) [4], [5], most of physical layer LPWAN approach based on the Aggregate Spread the samples in the reshaped train G »:¼ will have non-zero values, Pulse Modulation (ASPM) and provides a brief assessment of its and G »:¼ will have a much smaller PAPR than the designed properties in additive white Gaussian noise (AWGN) channel. -
T7264 U-Interface 2B1Q Transceiver
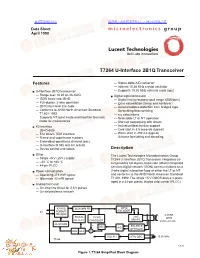
查询T7264供应商 捷多邦,专业PCB打样工厂,24小时加急出货 Data Sheet April 1998 T7264 U-Interface 2B1Q Transceiver Features — Sigma-delta A/D converter — Internal 15.36 MHz crystal oscillator ■ U-interface 2B1Q transceiver — Supports 15.36 MHz external clock input — Range over 18 kft on 26 AWG ■ Digital signal processor — ISDN basic-rate 2B+D — Digital timing recovery (pull range ±250 ppm) — Full-duplex, 2-wire operation — Echo cancellation (linear and nonlinear) — 2B1Q four-level line code — Accommodates distortion from bridged taps — Conforms to ANSI North American Standard — Scrambling/descrambling T1.601-1992 — crc calculations — Supports NT quiet mode and insertion loss test — Selectable LT or NT operation mode for maintenance — Start-up sequencing with timers ■ K2 interface — Activation/deactivation support — 2B+D data — Cold start in 3.5 seconds (typical) — 512 kbits/s TDM interface — Warm start in 200 ms (typical) — Frame and superframe markers — U-frame formatting and decoding — Embedded operations channel (eoc) — U-interface M bits and crc results — Device control and status Description ■ Other The Lucent Technologies Microelectronics Group ± — Single +5 V ( 5%) supply T7264 U-Interface 2B1Q Transceiver integrated cir- ° ° — –40 C to +85 C cuit provides full-duplex, basic-rate (2B+D) integrated — 44-pin PLCC services digital network (ISDN) communications on a ■ Power consumption 2-wire digital subscriber loop at either the LT or NT — Operating 275 mW typical and conforms to the ANSI North American Standard — Idle mode 30 mW typical T1.601-1992. The single +5 V CMOS device is pack- aged in a 44-pin plastic leaded chip carrier (PLCC). ■ Analog front end — On-chip line driver for 2.5 V pulses — On-chip balance network K2 BUS SCRAMBLER 2B1Q ENCODER K2 FORMAT, DECODE 2-WIRE LINE SIGNAL ECHO 2B1Q DRIVER DETECT CANCELER U-INTERFACE DESCRAM. -
Digital Transmission Channels
ORDER 6000.47 I J MAINTEN/om!, OF DIGITAL TRANSMISSION CHANNELS October 18, 1993 U.S. DEPARTMENT OF TRANSPORTATION FEDERAL AVIATION ADMINISTRATION Distribution: A-FAF-0(MAX); X(AF)-3;ZAF-604 Initiated By: AOS-240 6000.47 FOREWORD 1. PURPOSE. This handbook provides guidance and and used together by the maintenance technician in all prescribes technical standards and tolerances, and duties and activities for the maintenance of digital procedures applicable to the maintenance and inspec- lines. The three documents shall be used collectively tion of digital transmission channels. This handbook as the official source of maintenance policy and provides operating and maintenance requirements for direction authorized by the Operational Support specific services that provide digital transmission Service. References in this handbook shall indicate to channels, such as the leased interfacility National the user whether this handbook and/or the equipment Airspace System (NAS) communications system instruction book shalI be consulted for a particular (LINCS) . It also provides information on special standard, key inspection element or performance methods and techniques which will enable maintenance parameter, performance check, maintenance task, or personnel to achieve optimum performance from the maintenance procedure. equipment and transmission services. This information augments information available in instruction books b. The latest edition of Order 6032.1, Modifications and other handbooks, and complements the latest to Ground Facilities, Systems, and Equipment in the edition of Order 6000.15, General Maintenance National Airspace System, contains comprehensive Handbook for Airway Facilities. policy and direction concerning the development, authorization, implementation, and recording of modifications to facilities, systems, and equipment in 2.