Pacific Journal of Mathematics Vol. 285 (2016)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

UCLA UCLA Electronic Theses and Dissertations
UCLA UCLA Electronic Theses and Dissertations Title Automorphy Lifting Theorems Permalink https://escholarship.org/uc/item/5br5g0fq Author Kalyanswamy, Sudesh Publication Date 2017 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA Los Angeles Automorphy Lifting Theorems A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Mathematics by Sudesh Kalyanswamy 2017 c Copyright by Sudesh Kalyanswamy 2017 ABSTRACT OF THE DISSERTATION Automorphy Lifting Theorems by Sudesh Kalyanswamy Doctor of Philosophy in Mathematics University of California, Los Angeles, 2017 Professor Chandrashekhar Khare, Chair This dissertation focus on automorphy lifting theorems and related questions. There are two primary components. The first deals with residually dihedral Galois representations. Namely, fix an odd prime p, and consider a continuous geometric representation ρ : GF ! GLn(O), where F is either a totally real field if n = 2, or a CM field if n > 2, and O is the integer ring of a finite extension of Qp. The goal is to prove the automorphy of representations whose residual representation ρ¯ has the property that the restriction to GF (ζp) is reducible, where ζp denotes a primitive p- th root of unity. This means the classical Taylor-Wiles hypothesis fails and classical patching techniques do not suffice to prove the automorphy of ρ. Building off the work of Thorne, we prove an automorphy theorem in the n = 2 case and apply the result to elliptic curves. The case n > 2 is examined briefly as well. The second component deals with the generic unobstructedness of compatible systems of adjoint representations. -

A Conference in Honor of HARUZO HIDA on His 60Th Birthday P -Adic Modular Forms and Arithmetic
A Conference in Honor of HARUZO HIDA on His 60th Birthday p -adic Modular Forms and Arithmetic List of Registered Participants as of June 16th, 2012 Name E-Mail Affiliation Adebisi Agboola [email protected] UC Santa Barbara Patrick Allen [email protected] UCLA Daniel Barrera [email protected] Université Paris 7 Joel Bellaiche [email protected] Brandeis University John Bergdall [email protected] Brandeis University Manjul Bhargava [email protected] Princeton University Stephane Bijakowski [email protected] Université Paris 13 Saikat Biswas [email protected] Georgia Tech Don Blasius [email protected] UCLA George Boxer [email protected] Harvard University Miljan Brakocevic [email protected] McGill University Hunter Brooks [email protected] University of Michigan, Ann Arbor Ashay Burungale [email protected] UCLA Kevin Buzzard [email protected] Imperial College Rene Cabrera [email protected] UCLA Bryden Cais [email protected] University of Arizona Francesc Castella [email protected] McGill University Tommaso Centeleghe [email protected] Heidelberg University Ching-Li Chai [email protected] University of Pennsylvania Narasimha Kumar Cheraku [email protected] University of Heidelberg Liubomir Chiriac [email protected] Caltech Dohoon Choi [email protected] KAU John H. Coates [email protected] University of Cambridge Dan Collins [email protected] Princeton University Pierre Colmez [email protected] Institut -

David Donoho COMMENTARY 52 Cliff Ord J
ISSN 0002-9920 (print) ISSN 1088-9477 (online) of the American Mathematical Society January 2018 Volume 65, Number 1 JMM 2018 Lecture Sampler page 6 Taking Mathematics to Heart y e n r a page 19 h C th T Ru a Columbus Meeting l i t h i page 90 a W il lia m s r e lk a W ca G Eri u n n a r C a rl ss on l l a d n a R na Da J i ll C . P ip her s e v e N ré F And e d e r i c o A rd ila s n e k c i M . E d al Ron Notices of the American Mathematical Society January 2018 FEATURED 6684 19 26 29 JMM 2018 Lecture Taking Mathematics to Graduate Student Section Sampler Heart Interview with Sharon Arroyo Conducted by Melinda Lanius Talithia Williams, Gunnar Carlsson, Alfi o Quarteroni Jill C. Pipher, Federico Ardila, Ruth WHAT IS...an Acylindrical Group Action? Charney, Erica Walker, Dana Randall, by omas Koberda André Neves, and Ronald E. Mickens AMS Graduate Student Blog All of us, wherever we are, can celebrate together here in this issue of Notices the San Diego Joint Mathematics Meetings. Our lecture sampler includes for the first time the AMS-MAA-SIAM Hrabowski-Gates-Tapia-McBay Lecture, this year by Talithia Williams on the new PBS series NOVA Wonders. After the sampler, other articles describe modeling the heart, Dürer's unfolding problem (which remains open), gerrymandering after the fall Supreme Court decision, a story for Congress about how geometry has advanced MRI, “My Father André Weil” (2018 is the 20th anniversary of his death), and a profile on Donald Knuth and native script by former Notices Senior Writer and Deputy Editor Allyn Jackson. -

An Interview with Martin Davis
Notices of the American Mathematical Society ISSN 0002-9920 ABCD springer.com New and Noteworthy from Springer Geometry Ramanujan‘s Lost Notebook An Introduction to Mathematical of the American Mathematical Society Selected Topics in Plane and Solid Part II Cryptography May 2008 Volume 55, Number 5 Geometry G. E. Andrews, Penn State University, University J. Hoffstein, J. Pipher, J. Silverman, Brown J. Aarts, Delft University of Technology, Park, PA, USA; B. C. Berndt, University of Illinois University, Providence, RI, USA Mediamatics, The Netherlands at Urbana, IL, USA This self-contained introduction to modern This is a book on Euclidean geometry that covers The “lost notebook” contains considerable cryptography emphasizes the mathematics the standard material in a completely new way, material on mock theta functions—undoubtedly behind the theory of public key cryptosystems while also introducing a number of new topics emanating from the last year of Ramanujan’s life. and digital signature schemes. The book focuses Interview with Martin Davis that would be suitable as a junior-senior level It should be emphasized that the material on on these key topics while developing the undergraduate textbook. The author does not mock theta functions is perhaps Ramanujan’s mathematical tools needed for the construction page 560 begin in the traditional manner with abstract deepest work more than half of the material in and security analysis of diverse cryptosystems. geometric axioms. Instead, he assumes the real the book is on q- series, including mock theta Only basic linear algebra is required of the numbers, and begins his treatment by functions; the remaining part deals with theta reader; techniques from algebra, number theory, introducing such modern concepts as a metric function identities, modular equations, and probability are introduced and developed as space, vector space notation, and groups, and incomplete elliptic integrals of the first kind and required. -

Curriculum Vita James W. Cogdell Address: Department Of
Curriculum Vita James W. Cogdell Address: Department of Mathematics Telephone: (614)-292-8678 The Ohio State University Fax: (614)-292-1479 231 W. 18th Avenue e-mail: [email protected] Columbus, OH 43210 Education: B.S.: Yale University, 1977. Ph.D.: Yale University, 1981. Positions: Rutgers University, 1982{1988, Assistant Professor. Oklahoma State University, 1987{1988, Assistant Professor. Oklahoma State University, 1988{1994, Associate Professor. Oklahoma State University, 1994{2004, Professor. Oklahoma State University, 1999{2001, Southwestern Bell Professor. Oklahoma State University, 2000{2004, Regents Professor. Oklahoma State University, 2003{2004, Vaughn Foundation Professor. The Ohio State University, 2004{present, Professor. Visiting Positions: University of Maryland, 1981{1982, Visiting Instructor. UCLA, Fall 1982, NSF Postdoctoral Fellow. Institute for Advanced Study, Princeton, Fall 1983, NSF Postdoctoral Fellow. Institute for Advanced Studies, Hebrew University, Spring 1988, Member. Yale University, 1991{1992, Visiting Associate Professor. Yale University, Spring 1995, Visiting Fellow. Institute for Advanced Study, Princeton, 1999{2000, CMI Scholar. Yale University, Fall 2002, Visiting Fellow / CMI Scholar. Fields Institute, Spring 2003, Senior Researcher. Erwin Schr¨odingerInstitute, Vienna, Autumn 2011 & Winter 2012, Senior Research Fellow. Editorial Boards: 1. GAFA (Geometric and Functional Analysis), 2001 - present. 2. IMRN (International Mathematics Research Notices), 2005 - present. 3. JNT (Journal of Number Theory), 2006 - 2012. Publications { Papers: 1. Fabrication of submicron Josephson microbridges using optical projection lithography and lift off tech- niques (with M.D. Feuer & D.E. Prober). A.I.P. Conference Proceedings 44 (1978), 317{321. 2. Congruence zeta functions for M2(Q) and their associated modular forms. Math. Annalen 266 (1983), 141{198. -

Institute for Pure and Applied Mathematics at the University of California Los Angeles
Institute for Pure and Applied Mathematics at the University of California Los Angeles Annual Progress Report NSF Award/Institution #0439872-013151000 Submitted November 30, 2007 TABLE OF CONTENTS EXECUTIVE SUMMARY .................................................................................2 A. PARTICIPANT LIST ...............................................................................4 B. FINANCIAL SUPPORT LIST....................................................................4 C. INCOME AND EXPENDITURE REPORT ....................................................4 D. POSTDOCTORAL PLACEMENT LIST ........................................................5 E. INSTITUTE DIRECTORS’ MEETING REPORT ...........................................5 F. PARTICIPANT SUMMARY.....................................................................10 G. POSTDOCTORAL PROGRAM SUMMARY ................................................11 H. GRADUATE STUDENT PROGRAM SUMMARY .........................................14 I. UNDERGRADUATE STUDENT PROGRAM SUMMARY ..............................20 K. PROGRAM CONSULTANT LIST .............................................................60 L. PUBLICATIONS LIST ...........................................................................72 M. INDUSTRIAL AND GOVERNMENTAL INVOLVEMENT .............................72 N. EXTERNAL SUPPORT ...........................................................................76 O. COMMITTEE MEMBERSHIP ..................................................................77 P. CONTINUING IMPACT -

Of the American Mathematical Society June/July 2018 Volume 65, Number 6
ISSN 0002-9920 (print) ISSN 1088-9477 (online) of the American Mathematical Society June/July 2018 Volume 65, Number 6 James G. Arthur: 2017 AMS Steele Prize for Lifetime Achievement page 637 The Classification of Finite Simple Groups: A Progress Report page 646 Governance of the AMS page 668 Newark Meeting page 737 698 F 659 E 587 D 523 C 494 B 440 A 392 G 349 F 330 E 294 D 262 C 247 B 220 A 196 G 145 F 165 E 147 D 131 C 123 B 110 A 98 G About the Cover, page 635. 2020 Mathematics Research Communities Opportunity for Researchers in All Areas of Mathematics How would you like to organize a weeklong summer conference and … • Spend it on your own current research with motivated, able, early-career mathematicians; • Work with, and mentor, these early-career participants in a relaxed and informal setting; • Have all logistics handled; • Contribute widely to excellence and professionalism in the mathematical realm? These opportunities can be realized by organizer teams for the American Mathematical Society’s Mathematics Research Communities (MRC). Through the MRC program, participants form self-sustaining cohorts centered on mathematical research areas of common interest by: • Attending one-week topical conferences in the summer of 2020; • Participating in follow-up activities in the following year and beyond. Details about the MRC program and guidelines for organizer proposal preparation can be found at www.ams.org/programs/research-communities /mrc-proposals-20. The 2020 MRC program is contingent on renewed funding from the National Science Foundation. SEND PROPOSALS FOR 2020 AND INQUIRIES FOR FUTURE YEARS TO: Mathematics Research Communities American Mathematical Society Email: [email protected] Mail: 201 Charles Street, Providence, RI 02904 Fax: 401-455-4004 The target date for pre-proposals and proposals is August 31, 2018. -
Notices of the American Mathematical Society ABCD Springer.Com
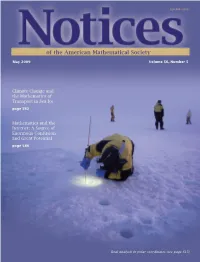
ISSN 0002-9920 Notices of the American Mathematical Society ABCD springer.com More Math Number Theory NEW Into LaTeX An Intro duc tion to NEW G. Grätzer , Mathematics University of W. A. Coppel , Australia of the American Mathematical Society Numerical Manitoba, National University, Canberra, Australia Models for Winnipeg, MB, Number Theory is more than a May 2009 Volume 56, Number 5 Diff erential Canada comprehensive treatment of the Problems For close to two subject. It is an introduction to topics in higher level mathematics, and unique A. M. Quarte roni , Politecnico di Milano, decades, Math into Latex, has been the in its scope; topics from analysis, Italia standard introduction and complete modern algebra, and discrete reference for writing articles and books In this text, we introduce the basic containing mathematical formulas. In mathematics are all included. concepts for the numerical modelling of this fourth edition, the reader is A modern introduction to number partial diff erential equations. We provided with important updates on theory, emphasizing its connections consider the classical elliptic, parabolic articles and books. An important new with other branches of mathematics, Climate Change and and hyperbolic linear equations, but topic is discussed: transparencies including algebra, analysis, and discrete also the diff usion, transport, and Navier- the Mathematics of (computer projections). math Suitable for fi rst-year under- Stokes equations, as well as equations graduates through more advanced math Transport in Sea Ice representing conservation laws, saddle- 2007. XXXIV, 619 p. 44 illus. Softcover students; prerequisites are elements of point problems and optimal control ISBN 978-0-387-32289-6 $49.95 linear algebra only A self-contained page 562 problems. -

Mathematics Without Apologies
mathematics without apologies mathematics without apologies portrait of a problematic vocation michael harris princeton university press princeton and oxford Copyright © 2015 by Princeton University Press Published by Princeton University Press, 41 William Street, Princeton, New Jersey 08540 In the United Kingdom: Princeton University Press, 6 Oxford Street, Woodstock, Oxfordshire OX20 1TW press.princeton.edu Cover illustration by Dimitri Karetnikov All Rights Reserved ISBN 978-0-691-15423-7 Library of Congress Control Number: 2014953422 British Library Cataloging-in-Publication Data is available This book has been composed in Times New Roman and Archer display Printed on acid-free paper ∞ Printed in the United States of America 10 9 8 7 6 5 4 3 2 1 To Béatrice, who didn’t want to be thanked contents preface ix acknowledgments xix Part I 1 chapter 1. Introduction: The Veil 3 chapter 2. How I Acquired Charisma 7 chapter α. How to Explain Number Theory at a Dinner Party 41 (First Session: Primes) 43 chapter 3. Not Merely Good, True, and Beautiful 54 chapter 4. Megaloprepeia 80 chapter β. How to Explain Number Theory at a Dinner Party 109 (Second Session: Equations) 109 bonus chapter 5. An Automorphic Reading of Thomas Pynchon’s Against the Day (Interrupted by Elliptical Reflections on Mason & Dixon) 128 Part II 139 chapter 6. Further Investigations of the Mind-Body Problem 141 chapter β.5. How to Explain Number Theory at a Dinner Party 175 (Impromptu Minisession: Transcendental Numbers) 175 chapter 7. The Habit of Clinging to an Ultimate Ground 181 chapter 8. The Science of Tricks 222 Part III 257 chapter γ. -

2006-07 Report from the Mathematical Sciences Research Institute April 2008
Mathematical Sciences Research Institute Annual Report for 2006-2007 I. Overview of Activities……………………………………………………........ 3 New Developments………………………………………………….. 3 Scientific Program and Workshops………………………………….. 5 Program Highlights………………………………………………….. 11 MSRI Experiences…………………………………………………… 15 II. Programs……………………………………………………………………….. 24 Program Participant List……………………………………………. 25 Participant Summary………………………………………………… 29 Publication List……………………………………………………… 30 III. Postdoctoral Placement……………………………………………………....... 35 IV. Summer Graduate Workshops………………………………………………… 36 Graduate Student Summary…………………………………………. 39 V. Undergraduate Program………………………………………………………… 40 Undergraduate Student Summary……………………………………. 41 VI. External Financial Support…………………………………………………….. 42 VII. Committee Membership……………………………………………………….. 47 VIII. Appendix - Final Reports…………………………………………………......... 49 Programs………………………………………………………………. 49 Geometric Evolution Equations and Related Topics…………... 49 Computational Applications of Algebraic Topology…………... 63 Dynamical Systems…………………………………………….. 70 Workshops……………………………………………………………… 80 Connections for Women: Computational Applications of Algebraic Topology…………………………………………….. 80 MSRI Short Course: An Introduction to Multiscale Methods….. 88 Connections for Women: Geometric Analysis and Nonlinear Partial Differential Equations…………………………... 90 Recent Developments in Numerical Methods and Algorithms for Geometric Evolution Equations….………………… 91 Lectures on String(y) Topology………………………………... 94 Introductory Workshop: -

Jared Weinstein
Jared Weinstein Boston University Office: (617)-353-2560 Deptartment of Mathematics Email: [email protected] 111 Cummington Mall Homepage: http://math.bu.edu/people/jsweinst Boston, MA 02215 Academic Positions Visiting Associate Professor, Stanford University, Fall 2019. Member, Mathematical Sciences Research Institute, Spring 2019. Associate Professor, Boston University, 2017{present Assistant Professor, Boston University, 2011{2017 Visiting Scholar, University of California, Berkeley, Fall 2014. Member, Institute for Advanced Study, Princeton, NJ, 2010{2011 NSF Postdoctoral Fellow, University of California, Los Angeles, 2008{2010 Assistant Adjunct Professor, University of California, Los Angeles, 2007{2008 Education Ph.D. Mathematics, University of California, Berkeley, 2007. A.B. Mathematics, magna cum laude, Harvard University, 2002. Grants and Awards NSF Research Award, \Perfectoid Spaces, Diamonds, and the Langlands Program", 2019-2022. Simons Foundation Fellowship, 2019. Sloan Fellowship, 2014{2016. NSF Conference Support for \p-adic Variation and Number Theory", a conference in honor of Glenn Stevens, 2014. NSF Research Award, \Arithmetic Moduli at Infinite Level", 2013{2016. NSF Postdoctoral Research Fellowship in the Mathematical Sciences, 2008{2011. NSF Graduate Research Fellowship, 2003{2006. Research Fields Number Theory, Arithmetic Geometry, Automorphic Forms, Representation Theory Jared Weinstein 2 Publications The smooth locus in infinite-level Rapoport-Zink spaces, with Alexander Ivanov. Submitted. Berkeley lectures on p-adic geometry, with Peter Scholze. To appear in Princeton University Annals of Math. Studies. On the Kottwitz conjecture for local Shimura varieties, with Tasho Kaletha, featuring an appendix by David Hansen. Preprint. Semistable models for modular curves of arbitrary level, Inventiones Mathematicae 205 (2016), no. 2, 459-526. Gal(Qp=Qp) as a geometric fundamental group, International Mathematics Research Notices (2016), no. -

Scientific Report for 2009 ESI the Erwin Schrödinger International
The Erwin Schr¨odingerInternational Boltzmanngasse 9/2 ESI Institute for Mathematical Physics A-1090 Vienna, Austria Scientific Report for 2009 Impressum: Eigent¨umer,Verleger, Herausgeber: The Erwin Schr¨odingerInternational Institute for Mathematical Physics, Boltzmanngasse 9, A-1090 Vienna. Redaktion: Joachim Schwermer, Jakob Yngvason Supported by the Austrian Federal Ministry of Science and Research (BMWF). Contents Preface 3 The ESI in 2009 . 5 Scientific Reports 7 Main Research Programmes . 7 Representation Theory of Reductive Groups - Local and Global Aspects . 7 Number Theory and Physics . 12 Selected Topics in Spectral Theory . 15 Large Cardinals and Descriptive Set Theory . 18 Entanglement and Correlations in Many-Body Quantum Mechanics . 20 The @¯-Neumann Problem: Analysis, Geometry, and Potential Theory . 24 Workshops Organized Outside the Main Programmes . 29 Winter School in Geometry and Physics . 29 Mathematics at the Turn of the 20th Century . 29 Gravity in Three Dimensions . 30 Catalysis from First Principles . 33 Architecture and Evolution of Genetic Systems . 34 Classical and Quantum Aspects of Cosmology . 35 Quanta and Geometry . 35 Recent Advances in Integrable Systems of Hydrodynamic Type . 36 Kontexte: Abschlusstagung des Initiativkollegs \Naturwissenschaften im historischen Kon- text" . 37 6th Vienna Central European Seminar on Particle Physics and Quantum Field Theory: Effective Field Theories . 37 (Un)Conceived Alternatives. Underdetermination of Scientific Theories between Philoso- phy and Physics . 38 Junior Research Fellows Programme . 40 Senior Research Fellows Programme . 42 Goran Mui´c:Selected Topics in the Theory of Automorphic Forms for Reductive Goups . 42 Raimar Wulkenhaar: Spectral triples in noncommutative geometry and quantum field theory 44 Michael Loss: Spectral inequalities and their applications to variational problems and evo- lution equations .