Economics 250A Lecture 1: a Very Quick Overview of Consumer Choice
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Theory of Consumer Behaviour
Theory of Consumer Behaviour Public Economy 1 What is Consumer Behaviour? • Suppose you earn 12,000 yen additionally – How many lunch with 1,000 yen (x1) and how many movie with 2,000 yen (x2) you enjoy? (x1, x2) = (10,1), (6,3), (3,4), (2,5), … – Suppose the price of movie is 1,500 yen? – Suppose the additional bonus is 10,000 yen? Public Economy 2 Consumer Behaviour • Feature of Consumer Behaviour • Consumption set (Budget constraint) • Preference • Utility • Choice • Demand • Revealed preference Public Economy 3 Feature of Consumer Behaviour Economic Entity Firm(企業), Consumer (家計), Government (経済主体) Household’s income Capital(資本), Labor(労働),Stock(株式) Consumer Firm Hire(賃料), Wage(賃金), Divided(配当) Goods Market (財・サービス市場) Price Demand Supply Quantity Consumer = price taker (価格受容者) Public Economy 4 Budget Set (1) • Constraint faced by consumer Possible to convert – Budget Constraint (income is limited) into monetary unit – Time Constraint (time is limited) under the given wage rate – Allocation Constraint Combine to Budget Constraint Generally, only the budget constraint is considered Public Economy 5 Budget Set (2) Budget Constraint Budget Constraint (without allocation constraint) (with allocation constraint) n pi xi I x2 i1 x2 Income Price Demand x1 x1 Budget Set (消費可能集合) B B 0 x1 0 x1 n n n n B x R x 0, pi xi I B x R x 0, pi xi I, x1 x1 i1 i1 Public Economy 6 Preference (1) • What is preference? A B A is (strictly) preferred to B (A is always chosen between A and B) A B A is preferred to B, or indifferent between two (B is never chosen between A and B) A ~ B A and B is indifferent (No difference between A and B) Public Economy 7 Preference (2) • Assumption regarding to preference 1. -

CONSUMER CHOICE 1.1. Unit of Analysis and Preferences. The
CONSUMER CHOICE 1. THE CONSUMER CHOICE PROBLEM 1.1. Unit of analysis and preferences. The fundamental unit of analysis in economics is the economic agent. Typically this agent is an individual consumer or a firm. The agent might also be the manager of a public utility, the stockholders of a corporation, a government policymaker and so on. The underlying assumption in economic analysis is that all economic agents possess a preference ordering which allows them to rank alternative states of the world. The behavioral assumption in economics is that all agents make choices consistent with these underlying preferences. 1.2. Definition of a competitive agent. A buyer or seller (agent) is said to be competitive if the agent assumes or believes that the market price of a product is given and that the agent’s actions do not influence the market price or opportunities for exchange. 1.3. Commodities. Commodities are the objects of choice available to an individual in the economic sys- tem. Assume that these are the various products and services available for purchase in the market. Assume that the number of products is finite and equal to L ( =1, ..., L). A product vector is a list of the amounts of the various products: ⎡ ⎤ x1 ⎢ ⎥ ⎢x2 ⎥ x = ⎢ . ⎥ ⎣ . ⎦ xL The product bundle x can be viewed as a point in RL. 1.4. Consumption sets. The consumption set is a subset of the product space RL, denoted by XL ⊂ RL, whose elements are the consumption bundles that the individual can conceivably consume given the phys- L ical constraints imposed by the environment. -

Slutsky Equation the Basic Consumer Model Is Max U(X), Which Is Solved by the Marshallian X:Px≤Y Demand Function X(P, Y)
Slutsky equation The basic consumer model is max U(x), which is solved by the Marshallian x:px≤y demand function X(p; y). The value of this primal problem is the indirect utility function V (p; y) = U(X(p; y)). The dual problem is minx fp · x j U(x) = ug, which is solved by the Hicksian demand function h(p; u). The value of the dual problem is the expenditure or cost function e(p; u) = p · H(p; u). First show that the Hicksian demand function is the derivative of the expen- diture function. e (p; u) = p · h(p; u) ≤p · h(p + ∆p; u) e (p + ∆p; u) = (p + ∆p) · h(p + ∆p; u) ≤ (p + ∆p) · h(p; u) (p + ∆p) · ∆h ≤ 0 ≤ p · ∆h ∆e = (p + ∆p) · h(p + ∆p; u) − p · h(p; u) ∆p · h(p + ∆p; u) ≤ ∆e ≤ ∆p · h(p; u) For a positive change in a single price pi this gives ∆e hi(p + ∆p; u) ≤ ≤ hi(p; u) ∆pi In the limit, this shows that the derivative of the expenditure function is the Hicksian demand function (and Shephard’s Lemma is the exact same result, for cost minimization by the firm). Also ∆p · h(p + ∆p; u) − ∆p · h(p; u) = ∆p · ∆h ≤ 0 meaning that the substitution effect is negative. Also, the expenditure function lies everywhere below its tangent with respect to p: that is, it is concave in p: e(p + ∆p; u) ≤ (p + ∆p) · h(p; u) = e(p; u) + ∆p · h(p; u) The usual analysis assumes that the consumer starts with no physical en- dowment, just money. -
Chapter 5 Online Appendix: the Calculus of Demand
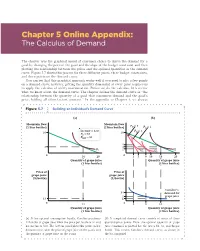
Chapter 5 Online Appendix: The Calculus of Demand The chapter uses the graphical model of consumer choice to derive the demand for a good by changing the price of the good and the slope of the budget constraint and then plotting the relationship between the prices and the optimal quantities as the demand curve. Figure 5.7 shows this process for three different prices, three budget constraints, and three points on the demand curve. You can see that this graphical approach works well if you need to plot a few points on a demand curve; however, getting the quantity demanded at every price requires us to apply the calculus of utility maximization. Before we do the calculus, let’s review what we know about the demand curve. The chapter defines the demand curve as “the relationship between the quantity of a good that consumers demand and the good’s price, holding all other factors constant.” In the appendix to Chapter 4, we always Figure 5.7 Building an Individual’s Demand Curve (a) (b) Mountain Dew Mountain Dew P = 4 (2 liter bottles) (2 liter bottles) G PG = 1 Income = $20 P = 2 10 10 G PG = $1 PMD = $2 4 3 3 U U 1 2 U U 1 3 2 0 14 20 0 3105 8 14 20 Quantity of grape juice Quantity of grape juice (1 liter bottles) (1 liter bottles) Price of Price of grape juice grape juice ($/bottle) ($/bottle) Caroline’s $4 demand for 2 grape juice $1 1 0 0 14 3 8 14 Quantity of grape juice Quantity of grape juice (1 liter bottles) (1 liter bottles) (a) At her optimal consumption bundle, Caroline purchases (b) A completed demand curve consists of many of these 14 bottles of grape juice when the price per bottle is $1 and quantity-price points. -

APEC 5152 - Handout 1
APEC 5152 - Handout 1 February 16, 2017 Micro-Preliminaries Contents 1 Consumer preferences 2 1.1 The indirect utility function . 4 1.2 The expenditure function . 6 1.3 Aggregation . 7 2 Production technologies 8 2.1 The cost function . 9 2.2 The value-added function . 11 2.3 Aggregation . 13 2.3.1 The aggregate cost function and value added function . 13 2.3.2 The aggregate gross national product function . 15 3 Appendix 16 3.1 The Primal-Dual Problem (Envelope Theorem) . 16 3.2 Elasticities and homogenous functions . 18 1 Introduction - microeconomic foundations Throughout these notes, the following notation denotes factor endowments, factor rental rates and output prices. Sectors are indexed by j 2 f1; 2; 3g ; and denote the quantity of sector-j's output by 3 the scalar Yj: Corresponding output prices are denoted p = (p1; p2; p3) 2 R++, with the scalar pj representing the per-unit price of sector-j output. We consider three factor endowments: labor, L; capital, K; and land Z. The corresponding factor rental rates are: w is the wage rate, r is the rate of return to capital, and τ is the unit land rental rate. Represent the vector of factor rental rates by w = (w; r; τ) : 1 Consumer preferences The economy is composed of a large number of atomistic households. Each household faces the η η η η 3 same vector of prices p and the same vector of factor rental rates w. Let υ = (L ;K ;Z ) 2 R++ denote the level of factor endowments held by household-η; with Lη;Kη and Zη representing the η 3 household's endowment of labor, capital and land. -

Public Economics Lecture Notes
Public Economics Lecture Notes Matteo Paradisi 1 Contents 1 Section 1-2: Uncompensated and Compensated Elas- ticities; Static and Dynamic Labor Supply 4 1.1 Uncompensated Elasticity and the Utility Maximization Problem . 4 1.2 Substitution Elasticity and the Expenditure Minimization Problem . 6 1.3 Relating Walrasian and Hicksian Demand: The Slutsky Equation . 6 1.4 StaticLaborSupplyChoice .................................. 7 1.5 Dynamic Labor Supply . 10 2 Section 2: Introduction to Optimal Income Taxa- tion 12 2.1 TheIncomeTaxationProblem ................................ 12 2.2 Taxation in a Model With No Behavioral Responses . 12 2.3 TowardstheMirrleesOptimalIncomeTaxModel . 13 2.4 Optimal Linear Tax Rate . 13 2.5 OptimalTopIncomeTaxation ................................ 15 3 Section 3-4: Mirrlees Taxation 17 3.1 TheModelSetup........................................ 17 3.2 OptimalIncomeTax ...................................... 19 3.3 Diamond ABC Formula . 20 3.4 Optimal Taxes With Income Effects ............................. 21 3.5 Pareto Efficient Taxes . 23 3.6 A Test of the Pareto Optimality of the Tax Schedule . 23 4 Section 5: Optimal Taxation with Income Effects and Bunching 28 4.1 Optimal Taxes with Income Effects.............................. 28 4.2 Bunching Estimator . 31 5 Section 6: Optimal Income Transfers 34 5.1 OptimalIncomeTransfersinaFormalModel . 34 5.2 Optimal Tax/Transfer with Extensive Margin Only . 35 5.3 Optimal Tax/Transfer with Intensive Margin Responses . 36 5.4 Optimal Tax/Transfer with Intensive and Extensive Margin Responses . 37 6 Section 7: Optimal Top Income Taxation 38 6.1 TrickleDown: AModelWithEndogenousWages . 38 6.2 Taxation in the Roy Model and Rent-Seeking . 39 6.3 Wage Bargaining and Tax Avoidance . 40 7 Section 8: Optimal Minimum Wage and Introduc- tion to Capital Taxation 44 7.1 Optimal Minimum Wage . -

IMVH Notation List
INTERMEDIATE MICROECONOMICS VIDEO HANDBOOK NOTATION LIST 11/18/14 MATHEMATICAL AND BASIC CONCEPTS x, ƒ(x) change in value of x, change in value of ƒ(x) ƒ(x), ƒ(x) first, second derivative of single-variable function ƒ(x) ƒ(x1,...,xn)/xi or ƒi (x1,...,xn) partial derivatives of multivariate function ƒ(x1,…,xn) y,x or E y,x elasticity of y with respect to x generic parameter in an optimization problem x*(), x1*(),…,xn*() solutions function(s) to a general optimization problem () optimal value function for a general optimization problem Lagrange multiplier P generic price for supply-demand diagram Q generic quantity for supply-demand diagram S, D supply and demand for supply-demand diagram CONSUMPTION AND DEMAND xi consumption level of commodity i (x1,…,xn) consumption bundle , , weak preference, strict preference and indifference U(x1,…,xn) utility function MUi (x1,…,xn) or Ui (x1,…,xn) marginal utility of commodity i MRSij(x1,…,xn) marginal rate of substitution between commodities i and j pi price of commodity i I consumer’s income * xi (p1,…,pn,I ) ordinary (“Marshallian”) demand function V(p1,…,pn,I ) indirect utility function c – xi (p1,…,pn,u) compensated (“Hicksian”) demand function – E(p1,…,pn,u) expenditure function EV, CV equivalent variation, compensating variation Le consumer’s leisure La consumer’s labor supply I 0 consumer’s nonlabor income w wage rate i or r interest rate ct consumption in period t Mt income in period t st saving in period t PRODUCTION AND COST L labor input K capital input q or Q output ƒ(L,K) or F(L,K) -
Advanced Microeconomics Comparative Statics and Duality Theory
Advanced Microeconomics Comparative statics and duality theory Harald Wiese University of Leipzig Harald Wiese (University of Leipzig) Advanced Microeconomics 1 / 62 Part B. Household theory and theory of the …rm 1 The household optimum 2 Comparative statics and duality theory 3 Production theory 4 Cost minimization and pro…t maximization Harald Wiese (University of Leipzig) Advanced Microeconomics 2 / 62 Comparative statics and duality theory Overview 1 The duality approach 2 Shephard’slemma 3 The Hicksian law of demand 4 Slutsky equations 5 Compensating and equivalent variations Harald Wiese (University of Leipzig) Advanced Microeconomics 3 / 62 Maximization and minimization problem Maximization problem: Minimization problem: Find the bundle that Find the bundle that maximizes the utility for a minimizes the expenditure given budget line. needed to achieve a given utility level. x2 indifference curve with utility level U A C B budget line with income level m x1 Harald Wiese (University of Leipzig) Advanced Microeconomics 4 / 62 The expenditure function and the Hicksian demand function I Expenditure function: e : R` R R, ! (p, U¯ ) e (p, U¯ ) := min px 7! x with U (x ) U¯ The solution to the minimization problem is called the Hicksian demand function: χ : R` R R` , ! + (p, U¯ ) χ (p, U¯ ) := arg min px 7! x with U (x ) U¯ Harald Wiese (University of Leipzig) Advanced Microeconomics 5 / 62 The expenditure function and the Hicksian demand function II Problem Express e in terms of χ and V in terms of the household optima! Lemma For any α > 0: χ (αp, U¯ ) = χ (p, U¯ ) and e (αp, U¯ ) = αe (p, U¯ ) . -

ECN 3040 Quiz 4 Winter 2019 1. the Marshallian Demand Function Is
ECN 3040 Quiz 4 Winter 2019 1. The Marshallian demand function is obtained by A) solving the expenditure minimization problem for the optimal value of the good conditional on prices and income. B) solving the expenditure minimization problem for the optimal value of the good conditional on prices and utility. C) solving the utility maximization problem for the optimal value of the good conditional on prices and utility. D) solving the utility maximization problem for the optimal value of the good conditional on prices and income. 2. The Hicksian demand function for good X states opitmal demand for X as a function of A) money income and utitlity. B) prices and utility. C) the inverted Lagrange multiplier. D) prices and money income. 3. For a normal good, the good's Hicksian demand curve is _____________ the good's Marshallian demand curve. A) the inverse of B) unrelated to C) steeper than D) flatter than 4. Billie Jean has utility function U XY0.6 0.4 . She has $100 of income to spend, the price of X is PX $10 and the price of Y is PY $8 . At her optimal consumption bundle, Billie Jean A) chooses {X 2, Y 10}and enjoys U1 10.6 units of utility. B) chooses {X 4, Y 6}and enjoys U1 4.6 units of utility. C) chooses {X 9, Y 8}and enjoys U1 8.6 units of utility. D) chooses {X 6, Y 5} and enjoys U1 5.6 units of utility. Page 1 5. Given the consumer has Cobb-Douglas utility function U XY1 , the Hicksian demand function for good X is I A) X H PX (1 )[I P ] B) X H Y PX 1 H PX C) X U 1 PY 1 H PY D) X U 1 PX 6. -

Demand Functions, Income Effects and Substitution
Demand Functions, Income E¤ects and Substitution E¤ects: Theory and Evidence David Autor 14.03 Fall 2004 1 The e¤ect of price changes on Marshallian demand A simple change in the consumer’s budget (i.e., an increase or decrease or I) involves a parallel shift of the feasible consumption set inward or outward from the origin. This economics of this are simple. Since this shift preserves the price ratio px ; it typically has no e¤ect on the consumer’s marginal rate of py substitution (MRS), Ux ; unless the chosen bundle is either initially or ultimately at a corner solution. Uy A rise in the price of one good holding constant both income and the price of other goods has economically more complex e¤ects: 1. It shifts the budget set inward toward the origin for the good whose price has risen. In other words, the consumer is now e¤ectively poorer. This component is the ‘incomee¤ect.’ 2. It changes the slope of the budget set so that the consumer faces a di¤erent set of market trade-o¤s. This component is the ‘price e¤ect.’ Although both shifts occur simultaneously, they are conceptually distinct and have potentially di¤erent implications for consumer behavior. 1.1 Income e¤ect First, consider the “income e¤ect.”What is the impact of an inward shift in the budget set in a 2-good economy (X1;X2): 1. Total consumption? [Falls] 2. Utility? [Falls] 3. Consumption of X1? [Answer depends on normal, inferior] 4. Consumption of X2? [Answer depends on normal, inferior] 1 1.2 Substitution e¤ect In the same two good economy, what happens to consumption of X1 if p1 p2 " but utility is held constant? In other words, we want the sign of @X1 Sign U=U . -

Lecture 6.1 - Demand Functions
Lecture 6.1 - Demand Functions 14.03 Spring 2003 1Theeffect of price changes on Marshallian de- mand A simple change in the consumer’s budget (i.e., an increase or decrease • or I) involves a parallel shift of the feasible consumption set inward or outward from the origin. This economics of this are simple. Since this shift preserves the price ratio Px , it typically has no effect on the PY consumer’s marginal rate of substitution³ ´ (MRS), Ux , unless the chosen Uy bundle is either initially or ultimately at a corner³ solution.´ A rise in the price of one good holding constant both income and the price • of other goods has economically more complex effects: — It shifts the budget set inward toward the origin for the good whose price has risen. In other words, the consumer is now effectively poorer. This component is the ‘income effect.’ — It changes the slope of the budget set so that the consumer faces a different set of market trade-offs. This component is the ‘price effect.’ — Although both shifts occur simultaneously, they are conceptually dis- tinct and have potentially different implications for consumer behav- ior. 1.1 Income effect First, consider the “income effect." What is the impact of an inward shift in the budget set in a 2-good economy (X1,X2): 1. Total consumption? 2. Total utility? 3. Consumption of X1? [Answer depends on normal, inferior] 4. Consumption of X2? [Answer depends on normal, inferior] 1 1.2 Substitution effect In the same two good economy, what happens to consumption of X1 if • p1 p2 ↑ but utility is held constant? In other words, we want the sign of • ∂X1 Sign U=U . -
Modern Microeconomics
Sanjay Rode Modern Microeconomics 2 Download free eBooks at bookboon.com Modern Microeconomics 1st edition © 2013 Sanjay Rode & bookboon.com ISBN 978-87-403-0419-0 3 Download free eBooks at bookboon.com Modern Microeconomics Contents Contents Preface 9 Acknowledgement 11 1 Consumer preference and utility 13 1.1 Introduction 13 1.2 Preference relations 13 1.3 Utility function 16 360° 1.4 Lexicographic ordering 18 1.5 Demand function 20 1.6 Revealed Preference Theory 22 thinking 1.7 The Weak Axiom of Revealed Preference360° (WARP) 23 . 1.8 Indirect utility function 27 1.9 Expenditure function thinking 32 1.10 The expenditure minimization problem . 37 1.11 The Hicksian demand function 39 360° thinking . 360° thinking. Discover the truth at www.deloitte.ca/careers Discover the truth at www.deloitte.ca/careers © Deloitte & Touche LLP and affiliated entities. Discover the truth at www.deloitte.ca/careers © Deloitte & Touche LLP and affiliated entities. © Deloitte & Touche LLP and affiliated entities. Discover the truth4 at www.deloitte.ca/careersClick on the ad to read more Download free eBooks at bookboon.com © Deloitte & Touche LLP and affiliated entities. Modern Microeconomics Contents 1.12 The Von Neumann-Morganstern utility function 43 1.13 Measures of Risk Aversion 50 Questions 53 2 The Production Function 55 2.1 Inputs to output function 55 2.2 Technology specification 55 2.3 Input requirement set 56 2.4 The transformation function 58 2.5 Monotonic technologies 59 2.6 Convex technology 61 2.7 Regular technology 62 2.8TMP PRODUCTIONCobb-Douglas technology NY026057B 4 12/13/201364 6 x2.9 4 Leontief technology PSTANKIE 65 ACCCTR0005 2.10 The technical rate of substitution 68 gl/rv/rv/baf Bookboon Ad Creative 2.11 Elasticity of substitution 71 2.12 Variation in scale 73 2.13 Revised technical rate of substitution 74 2.14 Homogenous and heterogeneous production function 76 2.15 The Envelope theorem for constrained optimization 79 © All rights reserved.