Hicksian Demand and Expenditure Function Duality, Slutsky Equation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Theory of Consumer Behaviour
Theory of Consumer Behaviour Public Economy 1 What is Consumer Behaviour? • Suppose you earn 12,000 yen additionally – How many lunch with 1,000 yen (x1) and how many movie with 2,000 yen (x2) you enjoy? (x1, x2) = (10,1), (6,3), (3,4), (2,5), … – Suppose the price of movie is 1,500 yen? – Suppose the additional bonus is 10,000 yen? Public Economy 2 Consumer Behaviour • Feature of Consumer Behaviour • Consumption set (Budget constraint) • Preference • Utility • Choice • Demand • Revealed preference Public Economy 3 Feature of Consumer Behaviour Economic Entity Firm(企業), Consumer (家計), Government (経済主体) Household’s income Capital(資本), Labor(労働),Stock(株式) Consumer Firm Hire(賃料), Wage(賃金), Divided(配当) Goods Market (財・サービス市場) Price Demand Supply Quantity Consumer = price taker (価格受容者) Public Economy 4 Budget Set (1) • Constraint faced by consumer Possible to convert – Budget Constraint (income is limited) into monetary unit – Time Constraint (time is limited) under the given wage rate – Allocation Constraint Combine to Budget Constraint Generally, only the budget constraint is considered Public Economy 5 Budget Set (2) Budget Constraint Budget Constraint (without allocation constraint) (with allocation constraint) n pi xi I x2 i1 x2 Income Price Demand x1 x1 Budget Set (消費可能集合) B B 0 x1 0 x1 n n n n B x R x 0, pi xi I B x R x 0, pi xi I, x1 x1 i1 i1 Public Economy 6 Preference (1) • What is preference? A B A is (strictly) preferred to B (A is always chosen between A and B) A B A is preferred to B, or indifferent between two (B is never chosen between A and B) A ~ B A and B is indifferent (No difference between A and B) Public Economy 7 Preference (2) • Assumption regarding to preference 1. -

CONSUMER CHOICE 1.1. Unit of Analysis and Preferences. The
CONSUMER CHOICE 1. THE CONSUMER CHOICE PROBLEM 1.1. Unit of analysis and preferences. The fundamental unit of analysis in economics is the economic agent. Typically this agent is an individual consumer or a firm. The agent might also be the manager of a public utility, the stockholders of a corporation, a government policymaker and so on. The underlying assumption in economic analysis is that all economic agents possess a preference ordering which allows them to rank alternative states of the world. The behavioral assumption in economics is that all agents make choices consistent with these underlying preferences. 1.2. Definition of a competitive agent. A buyer or seller (agent) is said to be competitive if the agent assumes or believes that the market price of a product is given and that the agent’s actions do not influence the market price or opportunities for exchange. 1.3. Commodities. Commodities are the objects of choice available to an individual in the economic sys- tem. Assume that these are the various products and services available for purchase in the market. Assume that the number of products is finite and equal to L ( =1, ..., L). A product vector is a list of the amounts of the various products: ⎡ ⎤ x1 ⎢ ⎥ ⎢x2 ⎥ x = ⎢ . ⎥ ⎣ . ⎦ xL The product bundle x can be viewed as a point in RL. 1.4. Consumption sets. The consumption set is a subset of the product space RL, denoted by XL ⊂ RL, whose elements are the consumption bundles that the individual can conceivably consume given the phys- L ical constraints imposed by the environment. -

Slutsky Equation the Basic Consumer Model Is Max U(X), Which Is Solved by the Marshallian X:Px≤Y Demand Function X(P, Y)
Slutsky equation The basic consumer model is max U(x), which is solved by the Marshallian x:px≤y demand function X(p; y). The value of this primal problem is the indirect utility function V (p; y) = U(X(p; y)). The dual problem is minx fp · x j U(x) = ug, which is solved by the Hicksian demand function h(p; u). The value of the dual problem is the expenditure or cost function e(p; u) = p · H(p; u). First show that the Hicksian demand function is the derivative of the expen- diture function. e (p; u) = p · h(p; u) ≤p · h(p + ∆p; u) e (p + ∆p; u) = (p + ∆p) · h(p + ∆p; u) ≤ (p + ∆p) · h(p; u) (p + ∆p) · ∆h ≤ 0 ≤ p · ∆h ∆e = (p + ∆p) · h(p + ∆p; u) − p · h(p; u) ∆p · h(p + ∆p; u) ≤ ∆e ≤ ∆p · h(p; u) For a positive change in a single price pi this gives ∆e hi(p + ∆p; u) ≤ ≤ hi(p; u) ∆pi In the limit, this shows that the derivative of the expenditure function is the Hicksian demand function (and Shephard’s Lemma is the exact same result, for cost minimization by the firm). Also ∆p · h(p + ∆p; u) − ∆p · h(p; u) = ∆p · ∆h ≤ 0 meaning that the substitution effect is negative. Also, the expenditure function lies everywhere below its tangent with respect to p: that is, it is concave in p: e(p + ∆p; u) ≤ (p + ∆p) · h(p; u) = e(p; u) + ∆p · h(p; u) The usual analysis assumes that the consumer starts with no physical en- dowment, just money. -
Chapter 5 Online Appendix: the Calculus of Demand
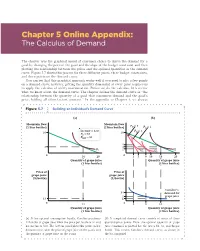
Chapter 5 Online Appendix: The Calculus of Demand The chapter uses the graphical model of consumer choice to derive the demand for a good by changing the price of the good and the slope of the budget constraint and then plotting the relationship between the prices and the optimal quantities as the demand curve. Figure 5.7 shows this process for three different prices, three budget constraints, and three points on the demand curve. You can see that this graphical approach works well if you need to plot a few points on a demand curve; however, getting the quantity demanded at every price requires us to apply the calculus of utility maximization. Before we do the calculus, let’s review what we know about the demand curve. The chapter defines the demand curve as “the relationship between the quantity of a good that consumers demand and the good’s price, holding all other factors constant.” In the appendix to Chapter 4, we always Figure 5.7 Building an Individual’s Demand Curve (a) (b) Mountain Dew Mountain Dew P = 4 (2 liter bottles) (2 liter bottles) G PG = 1 Income = $20 P = 2 10 10 G PG = $1 PMD = $2 4 3 3 U U 1 2 U U 1 3 2 0 14 20 0 3105 8 14 20 Quantity of grape juice Quantity of grape juice (1 liter bottles) (1 liter bottles) Price of Price of grape juice grape juice ($/bottle) ($/bottle) Caroline’s $4 demand for 2 grape juice $1 1 0 0 14 3 8 14 Quantity of grape juice Quantity of grape juice (1 liter bottles) (1 liter bottles) (a) At her optimal consumption bundle, Caroline purchases (b) A completed demand curve consists of many of these 14 bottles of grape juice when the price per bottle is $1 and quantity-price points. -

APEC 5152 - Handout 1
APEC 5152 - Handout 1 February 16, 2017 Micro-Preliminaries Contents 1 Consumer preferences 2 1.1 The indirect utility function . 4 1.2 The expenditure function . 6 1.3 Aggregation . 7 2 Production technologies 8 2.1 The cost function . 9 2.2 The value-added function . 11 2.3 Aggregation . 13 2.3.1 The aggregate cost function and value added function . 13 2.3.2 The aggregate gross national product function . 15 3 Appendix 16 3.1 The Primal-Dual Problem (Envelope Theorem) . 16 3.2 Elasticities and homogenous functions . 18 1 Introduction - microeconomic foundations Throughout these notes, the following notation denotes factor endowments, factor rental rates and output prices. Sectors are indexed by j 2 f1; 2; 3g ; and denote the quantity of sector-j's output by 3 the scalar Yj: Corresponding output prices are denoted p = (p1; p2; p3) 2 R++, with the scalar pj representing the per-unit price of sector-j output. We consider three factor endowments: labor, L; capital, K; and land Z. The corresponding factor rental rates are: w is the wage rate, r is the rate of return to capital, and τ is the unit land rental rate. Represent the vector of factor rental rates by w = (w; r; τ) : 1 Consumer preferences The economy is composed of a large number of atomistic households. Each household faces the η η η η 3 same vector of prices p and the same vector of factor rental rates w. Let υ = (L ;K ;Z ) 2 R++ denote the level of factor endowments held by household-η; with Lη;Kη and Zη representing the η 3 household's endowment of labor, capital and land. -

Calculating a Giffen Good
WINPEC Working Paper Series No.E1908 June 2019 Calculating a Giffen Good Kazuyuki Sasakura Waseda INstitute of Political EConomy Waseda University Tokyo, Japan Calculating a Giffen Good Kazuyuki Sasakura¤ June 6, 2019 Abstract This paper provides a simple example of the utility function with two consumption goods which can be calculated by hand to produce a Giffen good. It is based on the theoretical result by Kubler, Selden, and Wei (2013). Using a model of portfolio selection with a risk-free asset and a risky asset, they showed that the risk-free asset becomes a Giffen good if the utility belongs to the HARA family. This paper investigates their result further in a usual microeconomic setting, and derives the conditions for one of the consumption goods to be a Giffen good from a broader perspective. Key words: HARA family, Decreasing relative risk aversion, Giffen good, Slutsky equation, Ratio effect JEL classification: D11, D01, G11 1 Introduction Since Marshall (1895) mentioned a possibility of a Giffen good, economists have been trying to find it theoretically and empirically. Although their sincere efforts must be respected, it is also recognized among them that such a good seldom, if ever, shows up as Marhsall already said.1 But the recent theoretical result by Kubler, Selden, and Wei (2013) seems to be a solid example for a Giffen good. Using a model of portfolio selection with a risk-free asset and a risky asset, they showed that there always exists a parameter set which assures that the risk-free asset becomes a Giffen good if the utility belongs to the HARA (hyperbolic absolute risk aversion) family with decreasing absolute risk aversion (DARA) and decreasing relative risk aversion (DRRA).2 As is well known, Arrow (1971) proposed both DARA and increasing relative risk aversion (IRRA) because the former means that a risky asset is a normal good, while the latter means that a risk-free asset is a normal good the wealth elasticity of the demand for which exceeds one as is observed in reality. -

Public Economics Lecture Notes
Public Economics Lecture Notes Matteo Paradisi 1 Contents 1 Section 1-2: Uncompensated and Compensated Elas- ticities; Static and Dynamic Labor Supply 4 1.1 Uncompensated Elasticity and the Utility Maximization Problem . 4 1.2 Substitution Elasticity and the Expenditure Minimization Problem . 6 1.3 Relating Walrasian and Hicksian Demand: The Slutsky Equation . 6 1.4 StaticLaborSupplyChoice .................................. 7 1.5 Dynamic Labor Supply . 10 2 Section 2: Introduction to Optimal Income Taxa- tion 12 2.1 TheIncomeTaxationProblem ................................ 12 2.2 Taxation in a Model With No Behavioral Responses . 12 2.3 TowardstheMirrleesOptimalIncomeTaxModel . 13 2.4 Optimal Linear Tax Rate . 13 2.5 OptimalTopIncomeTaxation ................................ 15 3 Section 3-4: Mirrlees Taxation 17 3.1 TheModelSetup........................................ 17 3.2 OptimalIncomeTax ...................................... 19 3.3 Diamond ABC Formula . 20 3.4 Optimal Taxes With Income Effects ............................. 21 3.5 Pareto Efficient Taxes . 23 3.6 A Test of the Pareto Optimality of the Tax Schedule . 23 4 Section 5: Optimal Taxation with Income Effects and Bunching 28 4.1 Optimal Taxes with Income Effects.............................. 28 4.2 Bunching Estimator . 31 5 Section 6: Optimal Income Transfers 34 5.1 OptimalIncomeTransfersinaFormalModel . 34 5.2 Optimal Tax/Transfer with Extensive Margin Only . 35 5.3 Optimal Tax/Transfer with Intensive Margin Responses . 36 5.4 Optimal Tax/Transfer with Intensive and Extensive Margin Responses . 37 6 Section 7: Optimal Top Income Taxation 38 6.1 TrickleDown: AModelWithEndogenousWages . 38 6.2 Taxation in the Roy Model and Rent-Seeking . 39 6.3 Wage Bargaining and Tax Avoidance . 40 7 Section 8: Optimal Minimum Wage and Introduc- tion to Capital Taxation 44 7.1 Optimal Minimum Wage . -

3. Slutsky Equations Slutsky 方程式 Y
Part 2C. Individual Demand Functions 3. Slutsky Equations Slutsky 方程式 Own-Price Effects A Slutsky Decomposition Cross-Price Effects Duality and the Demand Concepts 2014.11.20 1 Own-Price Effects Q: Wha t h appens t o purch ases of good x chhhange when px changes? x/px Differentiation of the FOCsF.O.Cs from utility maximization could be used. HHthiowever, this approachhi is cumb ersome and provides little economic insight. 2 The Identity b/w Marshallian & Hicksian Demands: * Since x = x(px, py, I) = hx(px, py, U) Replacing I by the EF, e(px, py, U), and U by gives x(px, py, e(px, py, )) = hx(px, py, ) Differenti ati on ab ove equati on w.r.t. px, we have xxehx x pepp x x xx p x U = constant I = hx = x x xx x pp I xxU = constant 3 x xx x pp I xxU = constant S.E. I.E. ( – ) ( ?) The S. E. is always negative h x 0 as long as MRS is diminishing. px The Law of Deman d hldholds x x as long as x is a normal good. 00 Ipx xx If x is a Giffen good , 00 hen x must be an inferior good. pIx E/px = hx = x A$1iA $1 increase in px raiditises necessary expenditures by x dollars. 4 Compensated Demand Elasticities The compensated demand function: hx(px, py, U) Compensated OwnOwn--PricePrice Elasticity of Demand dhx hhp e x xx hpx , x dp x px hx px Compensated CrossCross--PricePrice Elasticity of Demand dhx hh p e xxy hpxy, dp y phyx p x 5 OwnOwn--PricePrice Elasticity form of the Slutsky Equation x h x x x ppxx I x php xI p xxx x x pxxx p x IxI ee se x,,pxxxhIh pxx ,I px where s x Expenditure share on x. -

More on Consumer Theory: Identities and Slutsky's Equation
Economics 101A Section Notes GSI: David Albouy More on Consumer Theory: Identities and Slutsky’s Equation 1 Identities Relating the UMP and the EMP The UMP and EMP discussed earlier are mathematically known as "dual" problems. What is a constraint in one is the objective in the other and vice-versa. Furthermore their solutions are very similar, and both are characterized by the same tangency condition, with the only major di¤erence coming from the di¤erence in the constraints: the budget constraint for the UMP and minimum utility constraint for the EMP. Some useful identities can be given on how their solutions are related. As shown earlier the maximum of utility attained in the UMP is given by the indirect utility function V (px, py, I). If we substitute the indirect utility function in for the minimum level utility in the EMP, i.e. we set the constraint U (x, y) ¸ V (px, py, I) = u, and minimize expenditure pxx+pyy. The solution of this particular EMP will be identical to the initial UMP. This can be seen since we will be along the same indi¤erence curve as we ended up in the UMP (characterized by U (x, y) = V (px, py, I) = u - remember since px, py, and I are given V (px, py, I) is just a number) and since we will be at a point where @U @x (x, y) px MRS (x, y) = @U = @y (x, y) py with an amount of expenditure equal to the amount of income I given in the UMP. -

G021 Microeconomics Lecture Notes Ian Preston
G021 Microeconomics Lecture notes Ian Preston 1 Consumption set and budget set The consumption set X is the set of all conceivable consumption bundles q, n usually identified with R+ The budget set B ⊂ X is the set of affordable bundles In standard model individuals can purchase unlimited quantities at constant prices p subject to total budget y. The budget set is the Walrasian, competitive or linear budget set: n 0 B = {q ∈ R+|p q ≤ y} Notice this is a convex, closed and bounded set with linear boundary p0q = y. Maximum affordable quantity of any commodity is y/pi and slope dqi/dqj|B = −pj/pi is constant and independent of total budget. In practical applications budget constraints are frequently kinked or discon- tinuous as a consequence for example of taxation or non-linear pricing. 2 Marshallian demands, elasticities and types of good The consumer chooses bundles f(y, p) ∈ B known as Marshallian, uncompen- sated, competitive or market demands. In general the consumer may be prepared to choose more than one bundle in which case f(y, p) is a demand correspon- dence but typically a single bundle is chosen and f(y, p) is a demand function. We wish to understand the effects of changes in y and p on demand for, say, the ith good: • total budget y – the path traced out by demands in q-space as y increases is called the income expansion path whereas the graph of fi(y, p) as a function of y is called the Engel curve – for differentiable demands we can summarise dependence in the total budget elasticity y ∂qi ∂ ln qi i = = qi ∂y ∂ ln y 1 3 PROPERTIES -

ECON2001 Microeconomics Lecture Notes Budget Constraint
ECON2001 Lecture Notes ECON2001 Microeconomics Lecture Notes Term 1 Ian Preston Budget constraint Consumers purchase goods q from within a budget set B of affordable bun- dles. In the standard model, prices p are constant and total spending has to remain within budget p0q ≤ y where y is total budget. Maximum affordable quantity of any commodity is y/pi and slope ∂qi/∂qj|B = −pj/pi is constant and independent of total budget. In practical applications budget constraints are frequently kinked or discon- tinuous as a consequence for example of taxation or non-linear pricing. If the price of a good rises with the quantity purchased (say because of taxation above a threshold) then the budget set is convex whereas if it falls (say because of a bulk buying discount) then the budget set is not convex. Marshallian demands The consumer’s chosen quantities written as a function of y and p are the Marshallian or uncompensated demands q = f(y, p) Consider the effects of changes in y and p on demand for, say, the ith good: • total budget y – the path traced out by demands as y increases is called the income expansion path whereas the graph of fi(y, p) as a function of y is called the Engel curve – we can summarise dependence in the total budget elasticity y ∂qi ∂ ln qi i = = qi ∂y ∂ ln y – if demand for a good rises with total budget, i > 0, then we say it is a normal good and if it falls, i < 0, we say it is an inferior good – if budget share of a good, wi = piqi/y, rises with total budget, i > 1, then we say it is a luxury or income elastic and if it -

IMVH Notation List
INTERMEDIATE MICROECONOMICS VIDEO HANDBOOK NOTATION LIST 11/18/14 MATHEMATICAL AND BASIC CONCEPTS x, ƒ(x) change in value of x, change in value of ƒ(x) ƒ(x), ƒ(x) first, second derivative of single-variable function ƒ(x) ƒ(x1,...,xn)/xi or ƒi (x1,...,xn) partial derivatives of multivariate function ƒ(x1,…,xn) y,x or E y,x elasticity of y with respect to x generic parameter in an optimization problem x*(), x1*(),…,xn*() solutions function(s) to a general optimization problem () optimal value function for a general optimization problem Lagrange multiplier P generic price for supply-demand diagram Q generic quantity for supply-demand diagram S, D supply and demand for supply-demand diagram CONSUMPTION AND DEMAND xi consumption level of commodity i (x1,…,xn) consumption bundle , , weak preference, strict preference and indifference U(x1,…,xn) utility function MUi (x1,…,xn) or Ui (x1,…,xn) marginal utility of commodity i MRSij(x1,…,xn) marginal rate of substitution between commodities i and j pi price of commodity i I consumer’s income * xi (p1,…,pn,I ) ordinary (“Marshallian”) demand function V(p1,…,pn,I ) indirect utility function c – xi (p1,…,pn,u) compensated (“Hicksian”) demand function – E(p1,…,pn,u) expenditure function EV, CV equivalent variation, compensating variation Le consumer’s leisure La consumer’s labor supply I 0 consumer’s nonlabor income w wage rate i or r interest rate ct consumption in period t Mt income in period t st saving in period t PRODUCTION AND COST L labor input K capital input q or Q output ƒ(L,K) or F(L,K)