Removal of Backlash from Steering Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mechanical Advantage Use the Equation for Mechanical Advantage to See How Machines Multiply Force
Name Date Class WORKSHEET MATH SKILLS USED Division MATH IN SCIENCE: PHYSICAL SCIENCE 53 Decimals Mechanical Advantage Use the equation for mechanical advantage to see how machines multiply force. The mechanical advantage of a machine is the factor by which the machine multiplies force. The mechanical advantage of a machine can be used to determine how well a ma- chine works and whether it can perform a particular job. output force EQUATION: mechanical advantage (MA) ϭ ᎏᎏ input force SAMPLE PROBLEM: What is the mechanical advantage of a lever that requires an input force of 20 N and lifts an object that weighs 60 N? 60 N mechanical advantage (MA) ϭ ᎏ 20 N MA ϭ 3 Practice Your Skills! Use the equation for mechanical advantage to answer the following questions: 1. Amanda uses a wheelbarrow to lift a load of bricks. The bricks weigh 600 N, which is more than Amanda could normally carry. However, with the wheelbarrow, Amanda can lift the bricks with as little as 120 N. What is the mechanical advantage of the wheelbarrow? 2. Marshall wants to remove a tree stump from the ground. To do this, he puts one end of a long beam under the stump and puts all of his weight on the other end. His weight is just enough to lift the stump. The stump weighs 400 N. Marshall weighs 250 N. What is the mechanical advantage of the lever Marshall is using? 3. A system of pulleys allows a mechanic to lift an 1800 N engine. t and Winston. All rights reserved. -

Chapter 14 Work, Power, and Machines
0161_hsps09_GRSW_Ch14.qxd 7/27/07 3:33 PM Page 157 Name ___________________________ Class ___________________ Date _____________ Chapter 14 Work, Power, and Machines Summary 14.1 Work and Power For a force to do work on an object, some of the force must act in the same direction as the object moves. If there is no movement, no work is done. • Work is the product of force and distance. • Work is done when a force moves an object over a distance. Any part of a force that does not act in the direction of motion does no work on an object. • The joule (J) is the SI unit of work. • When a force of 1 newton moves an object 1 meter in the direction of the force, 1 joule of work is done. Doing work at a faster rate requires more power. To increase power, you can increase the amount of work done in a given time, or you can do a given amount of work in less time. • Power is the rate of doing work. • The SI unit of power is the watt (W), which is equal to one joule per second. • One horsepower (hp) is equal to about 746 watts. 14.2 Work and Machines Machines make work easier to do. They change the size of a force needed, the direction of a force, or the distance over which a force acts. •Amachine is a device that changes a force. Because of friction, the work done by a machine is always less than the work done on the machine. -

Chapter 8 Glossary
Technology: Engineering Our World © 2012 Chapter 8: Machines—Glossary friction. A force that acts like a brake on moving objects. gear. A rotating wheel-like object with teeth around its rim used to transmit force to other gears with matching teeth. hydraulics. The study and technology of the characteristics of liquids at rest and in motion. inclined plane. A simple machine in the form of a sloping surface or ramp, used to move a load from one level to another. lever. A simple machine that consists of a bar and fulcrum (pivot point). Levers are used to increase force or decrease the effort needed to move a load. linkage. A system of levers used to transmit motion. lubrication. The application of a smooth or slippery substance between two objects to reduce friction. machine. A device that does some kind of work by changing or transmitting energy. mechanical advantage. In a simple machine, the ability to move a large resistance by applying a small effort. mechanism. A way of changing one kind of effort into another kind of effort. moment. The turning force acting on a lever; effort times the distance of the effort from the fulcrum. pneumatics. The study and technology of the characteristics of gases. power. The rate at which work is done or the rate at which energy is converted from one form to another or transferred from one place to another. pressure. The effort applied to a given area; effort divided by area. pulley. A simple machine in the form of a wheel with a groove around its rim to accept a rope, chain, or belt; it is used to lift heavy objects. -

Levers and Gears: a Lot for a Little
Physics Levers and Gears: A lot for a little A surprising number of the tools and machines we rely on every day – from door handles and cricket bats to clocks and bikes – can be explained in terms of a few simple ideas. The same principles allowed ancient civilizations to build enormous pyramids and the mysterious astronomical device known as the Antikythera Mechanism. In this lesson you will investigate the following: • How do simple machines allow us to achieve a lot with little effort? • What is mechanical advantage and how does it apply to levers, wheels and gears? • How do gear systems work? So gear up for a look at how some of our most useful machines work. This is a print version of an interactive online lesson. To sign up for the real thing or for curriculum details about the lesson go to www.cosmosforschools.com Introduction: Levers and Gears A reconstruction of the Antikythera Mechanism. In 1900 a team of divers discovered a 2000-year-old shipwreck near the Greek island of Antikythera. Inside the wreck they found an incredible range of treasures including beautiful bronze statues and glass bowls. They also found a plain-looking lump of bronze no bigger than a shoebox. Closer examination revealed that the object had gear wheels embedded in it – as though it was some kind of ancient clock. It soon became known as the Antikythera Mechanism but its internal structure and purpose remained mysterious for decades. Later investigations using X-rays uncovered thirty interlocking gears and inscriptions of the ancient Greek words for “sphere” and “cosmos”. -
Simple Machines Work 5.1 What Is Work?
5 Table of Contents 5 Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines Work 5.1 What is work? • To many people, the word work means something they do to earn money. • The word work also means exerting a force with your muscles. Work 5.1 What is work? • Someone might say they have done work when they push as hard as they can against a wall that doesn't move. • However, in science the word work is used in a different way. Work 5.1 Work Makes Something Move • Remember that a force is a push or a pull. In order for work to be done, a force must make something move. • Work is the transfer of energy that occurs when a force makes an object move. • If you push against the desk and nothing moves, then you haven't done any work. Work 5.1 Doing work • There are two conditions that have to be satisfied for work to be done on an object. • One is that the applied force must make the object move, and the other is that the movement must be in the same direction as the applied force. Work 5.1 Doing work • For example, when you lift a stack of books, your arms apply a force upward and the books move upward. Because the force and distance are in the same direction, your arms have done work on the books. Work 5.1 Force and Direction of Motion • When you carry books while walking, you might think that your arms are doing work. -

TEE Final Report
Project Number: AHH – 1171 Pseudo‐Fluid Control Extension System A Major Qualifying Project Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Bachelor of Science In Mechanical Engineering by John Dunbar ______________________________ Christopher Farren ______________________________ Mari Freitas ______________________________ Date: April 26, 2012 Approved: Keywords ______________________________ Professor Allen H. Hoffman, Major Advisor 1. Transducer 2. TEE 3. Pseudo‐fluid ______________________________ Professor Holly K. Ault, Co‐Advisor Abstract An interventional cardiologist (IC) performs procedures using a transesophageal echocardiogram transducer (TEE). The TEE is positioned by an echo cardiologist who is present for the entirety of the procedures. The purpose of this project was to redesign the user interface of the TEE in order to minimize the role of the echo cardiologist and give more control to the IC. This was accomplished by creating an extension of the TEE control system that can remotely control the TEE from a distance of five feet. Preliminary designs were created using cable and fluid hydraulic systems; however, both types of systems were problematic. A pseudo‐fluid system consisting of tubes filled with steel balls was developed to capture the positive aspects of the cable and fluid systems. The user interface of the new system consisted of two rotatable knobs that actuate rack and pinion gear sets, which push the pseudo‐ fluid balls through tubes. At the distal ends of the tubes, the balls move the racks of rack and pinion gear sets that in turn rotate shafts in the current TEE. The resulting user interface has similar ergonomic and mechanical properties as the original TEE. -

Mechanisms of Most Cars
Moments The crane in the image below looks unstable, as though it should topple over. There appears to be too much of the boom on the left-hand side of the tower. It doesn’t fall because of the presence of a counter balance weight on the right-hand side. The boom is therefore balanced. In order to understand this better, we need to understand pivots, moments and equilibrium. The pivot point or fulcrum is the point at which something rotates. The weights on the scales are at equal points from the pivot point. When something is balanced it is said to be in equilibrium. In the example of the see-saw, if one of the people moves backwards or forwards, the balance is tipped one way or the other. The see-saw is no longer in equilibrium. When something is in equilibrium, the moments of a force are balanced. The Moment of a Force is calculated as the force multiplied by the distance from the pivot point. Moment = F x d Distance (d) Pivot Force (F) This can also be represented as illustrated below: The Principal of Moments states that for there to be equilibrium, the clockwise moments must equal the anti-clockwise moments. Clockwise Moments = F2 x d2 Anti-Clockwise Moments = F1 x d1 If F2 x d2 = F1 x d1 there is equilibrium Example Clockwise Moments = 20N x 1m Anti-Clockwise Moments = 10N x 2m 20Nm = 20Nm Therefore, the scales is in equilibrium. Levers A lever is a rigid rod, pivoted about a fixed point or axis, which is known as a fulcrum. -

Novel Mechanical Mechanisms for the Development of Undergraduate Knowledge
Novel Mechanical Mechanisms for the Development of Undergraduate Knowledge by Michael L. Stern Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements for the degree of Bachelor of Science in Mechanical Engineering at the Massachusetts Institute of Technology June 2009 2009 Michael Stern All rights reserved The Author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter created. Signature of Author ……………………………………………………………………………… Department of Mechanical Engineering May 19, 2009 Certified by ...……………………………………………………………………………………… Barbara Hughey, PhD Thesis Supervisor Instructor Accepted by ……..………………………………………………………………………………… Professor J. Lienhard V Collins Professor of Mechanical Engineering Chairman, Undergraduate Thesis Committee Acknowledgements I would like to give special thanks to Dr. Barbara Hughey for the enormous amount of help she provided both in developing the idea for this thesis and the execution of the thesis itself. She helped me take the idea from a neat project and turn it into an academic thesis, enduring my daily bothering throughout the semester, for advice, troubleshooting and writing recommendations. I would also like to thank Michael Tarkanian for allowing me to use his laser cutter. The ease of access made a world of difference in completing my thesis and doing so in a timely manner. Finally, I would like to thank my mom for helping me proofread the drafts, catching my grammatical foolishness. 2 Novel Mechanical Mechanisms for the Development of Undergraduate Knowledge by Michael L. Stern Submitted to the Department of Mechanical Engineering on May 19th, 2009 in Partial Fulfillment of the Requirements for the degree of Bachelor of Science in Mechanical Engineering Abstract: Although MIT Students have been taught an enormous amount of theory and design, they are not exposed to simple machine elements and designs from the past. -
1700 Animated Linkages
Nguyen Duc Thang 1700 ANIMATED MECHANICAL MECHANISMS With Images, Brief explanations and Youtube links. Part 1 Transmission of continuous rotation Renewed on 31 December 2014 1 This document is divided into 3 parts. Part 1: Transmission of continuous rotation Part 2: Other kinds of motion transmission Part 3: Mechanisms of specific purposes Autodesk Inventor is used to create all videos in this document. They are available on Youtube channel “thang010146”. To bring as many as possible existing mechanical mechanisms into this document is author’s desire. However it is obstructed by author’s ability and Inventor’s capacity. Therefore from this document may be absent such mechanisms that are of complicated structure or include flexible and fluid links. This document is periodically renewed because the video building is continuous as long as possible. The renewed time is shown on the first page. This document may be helpful for people, who - have to deal with mechanical mechanisms everyday - see mechanical mechanisms as a hobby Any criticism or suggestion is highly appreciated with the author’s hope to make this document more useful. Author’s information: Name: Nguyen Duc Thang Birth year: 1946 Birth place: Hue city, Vietnam Residence place: Hanoi, Vietnam Education: - Mechanical engineer, 1969, Hanoi University of Technology, Vietnam - Doctor of Engineering, 1984, Kosice University of Technology, Slovakia Job history: - Designer of small mechanical engineering enterprises in Hanoi. - Retirement in 2002. Contact Email: [email protected] 2 Table of Contents 1. Continuous rotation transmission .................................................................................4 1.1. Couplings ....................................................................................................................4 1.2. Clutches ....................................................................................................................13 1.2.1. Two way clutches...............................................................................................13 1.2.1. -

UNIT2.6-Mechanisms: Eng Notes
EP@BHS-TOPIC 2: Energy, UNIT2.6: Mechanisms Page 1 UNIT 2.6 MECHANISMS: Concepts Addressed in Lesson: 1. Most mechanisms are composed of simple machines, interlocking gears, chain driven sprockets, and belt driven pulleys. 2. Mechanisms are used to transmit energy through a system by manipulating force, speed, and direction. 3. Mechanical advantages mathematically represent the ratio of the force output to the force input for mechanisms. Performance Objectives Addressed in Lesson: It is expected that students will: o Measure forces, speeds, and distances as related to the operation of mechanisms. o Distinguish between the six simple machines, their attributes, and components. o Calculate ideal mechanical advantages, gear ratios, and drive ratios for mechanisms. o Design, create, and test gear, belt-pulley, and/or chain-sprocket systems. o Calculate work, power, torque, and efficiency for mechanical systems. Assessment: Explanation • Students will explain the difference between engineering and engineering technology. • Students will explain the relationship between work and power in a mechanical system. • Students will explain the processes of calculating mechanical advantage. Interpretation • Students will make journal entries reflecting on their learning experiences. • Students will explain the importance and relevance of simple machines in everyday life. Application • Students will apply their knowledge of simple machines and calculate mechanical advantage of objects within the lab environment. • Students will apply their knowledge of system efficiency to calculate efficiency of a mechanical system. • Students will apply their knowledge of gear, sprocket, and pulley systems to calculate speed, distance, rotational direction, and mechanical advantage. Perspective • Students will select an engineering or engineering technology field of interest and prepare an interview with a professional within the field of interest. -
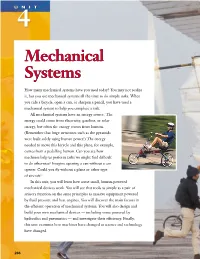
Mechanical Systems
UNIT Mechanical Systems How many mechanical systems have you used today? You may not realize it, but you use mechanical systems all the time to do simple tasks. When you ride a bicycle, open a can, or sharpen a pencil, you have used a mechanical system to help you complete a task. All mechanical systems have an energy source. The energy could come from electricity, gasoline, or solar energy, but often the energy comes from humans. (Remember that huge structures such as the pyramids were built solely using human power!) The energy needed to move this bicycle and this plane, for example, comes from a pedalling human. Can you see how machines help us perform tasks we might find difficult to do otherwise? Imagine opening a can without a can opener. Could you fly without a plane or other type of aircraft? In this unit, you will learn how some small, human-powered mechanical devices work. You will see that tools as simple as a pair of scissors function on the same principles as massive equipment powered by fluid pressure and heat engines. You will discover the main factors in the efficient operation of mechanical systems. You will also design and build your own mechanical devices — including some powered by hydraulics and pneumatics — and investigate their efficiency. Finally, this unit examines how machines have changed as science and technology have changed. 266 Unit Contents TOPIC 1 Levers and Inclined Planes 270 TOPIC 2 The Wheel and Axle,Gears, and Pulleys 285 TOPIC 3 Energy, Friction, and Efficiency 296 TOPIC 4 Force, Pressure, and Area 304 TOPIC 5 Hydraulics and Pneumatics 313 TOPIC 6 Combining Systems 326 TOPIC 7 Machines Throughout History 332 TOPIC 8 People and Machines 342 UNIT 4 • How do we use How many machines have you used today? machines to do work and How do we use mechanical devices such as to transfer energy? levers and pulleys to help us perform tasks? In Topics 1–3, you will learn about lots of How can we design and • mechanical devices. -

The Wheel and Axle, Gears, and Pulleys
TOPIC 2 The Wheel and Axle, Gears, and Pulleys Earlier, you discovered that you can lift a heavy load as long as you can find a lever that is long enough and strong enough to do the job. Sometimes, however, levers are not practical, as shown in Figure 4.11. Fortunately, there are many other kinds of machines that can give you a mechanical advantage great enough to move a heavy load with a much smaller effort force. Think about this question: How could you modify a lever to make it shorter, but still Figure 4.11 No one would able to move a load over a longer distance? Look for clues in Figure ever try to lift an elephant 4.12A, which shows a person loading a motor boat onto a boat-trailer. like this! A Lever That Keeps on Lifting The device the person is using to move the boat is called a winch. The handle of a manual A winch consists of a small cylinder and a crank or handle. Study pencil sharpener and the Figure 4.12B to see how a winch works. Notice that the axle of the reel on a fishing rod are winch is held in place and acts like a fulcrum. The handle is like the examples of winches. effort arm of a lever. Exerting a force on the handle turns the wheel. This motion is much like the effort force on a lever. However, you do not reach “bottom” with the handle. You just keep turning. load arm (radius of cylinder) fulcrum effort arm load (length of handle) effort A B Figure 4.12 A winch makes loading a boat onto a trailer relatively easy.