Swri Internal Research and Development 2017
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

NOAO Newsletter #104
NOAO Newsletter NATIONAL OPTICAL ASTRONOMY OBSERVATORY ISSUE 104 — SEPTEMBER 2011 Science Highlights Finding Hidden Supermassive Black Holes in Distant Galaxies ........ 2 Gemini, MMT, and Hale ............................................................ 22 Star Formation Rises with Time in UV-Bright Galaxies CTIO Instruments Available for 2012A ......................................... 24 over the First Two Billion Years.................................................... 4 Gemini Instruments Available for 2012A* ................................... 25 Gemini/GMOS—Spectroscopy of a Large Sample KPNO Instruments Available for 2012A........................................ 26 of Strong Lensing Selected Galaxy Clusters ................................. 5 MMT Instruments Available for 2012A ......................................... 27 Late-Time Light Curves of Type II Supernovae: Hale Instruments Available for 2012A ......................................... 27 Physical Properties of SNe and Their Environment ....................... 7 CHARA Instruments Available for 2012 ........................................ 27 Changes Made to the ORP ........................................................... 27 System Science Capabilities Participating in the SMARTS Consortium ..................................... 28 NOAO at the Science Frontiers of the 2010 Decadal Survey ........... 10 After Twelve Years of Mosaic II… ................................................ 28 Dr. Timothy Beers to Become Associate Director for KPNO ............ 11 Phoenix Returning -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -

Geologic Studies of Planetary Surfaces Using Radar Polarimetric Imaging 2
Geologic studies of planetary surfaces using radar polarimetric imaging 2 4 Lynn M. Carter NASA Goddard Space Flight Center 8 Donald B. Campbell 9 Cornell University 10 11 Bruce A. Campbell 12 Smithsonian Institution 13 14 14 Abstract: Radar is a useful remote sensing tool for studying planetary geology because it is 15 sensitive to the composition, structure, and roughness of the surface and can penetrate some 16 materials to reveal buried terrain. The Arecibo Observatory radar system transmits a single 17 sense of circular polarization, and both senses of circular polarization are received, which allows 18 for the construction of the Stokes polarization vector. From the Stokes vector, daughter products 19 such as the circular polarization ratio, the degree of linear polarization, and linear polarization 20 angle are obtained. Recent polarimetric imaging using Arecibo has included Venus and the 21 Moon. These observations can be compared to radar data for terrestrial surfaces to better 22 understand surface physical properties and regional geologic evolution. For example, 23 polarimetric radar studies of volcanic settings on Venus, the Moon and Earth display some 24 similarities, but also illustrate a variety of different emplacement and erosion mechanisms. 25 Polarimetric radar data provides important information about surface properties beyond what can 26 be obtained from single-polarization radar. Future observations using polarimetric synthetic 27 aperture radar will provide information on roughness, composition and stratigraphy that will 28 support a broader interpretation of surface evolution. 29 2 29 1.0 Introduction 30 31 Radar polarimetry has the potential to provide more information about surface physical 32 properties than single-polarization backscatter measurements, and has often been used in remote 33 sensing observations of Solar System objects. -
Technology Today Spring 2016
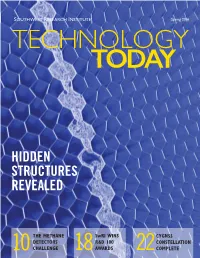
Spring 2016 HIDDEN STRUCTURES REVEALED THE METHANE SwRI WINS CYGNSS DETECTORS R&D 100 CONSTELLATION 10 CHALLENGE 18AWARDS 22TECHNOLOGYCOMPLETE TODAY 13 AVIATION FUEL TESTING To meet the needs of the Department of Defense, the Energy Institute, and the aviation industry, SwRI maintains facilities to qualify fuel filters, develop new test methods, and enhance aviation fuel technology. The coalescer-separator shown removes dirt and water contaminants from fuel in both commercial and military fuel handling systems. SwRI works with industry organizations to develop and improve quality standards. The Institute also helps industry develop advanced sensing technologies and fuel handling equipment. AVIATION FUEL FILTRATION AVIATION FUEL MONITORS AVIATION FUEL COALESCERS AVIATION FUEL ADDITIVES WATER MAPPING TEST JET FUEL ELECTRONIC SENSOR MIL PRF 52308J ELECTRONIC SENSORS aviationturbinefuels.swri.org DM018200_6585 12 SPRING 2016 • VOLUME 37, NO. 1 Executive Director of Communications ON THE COVER Tim Martin, Ph.D. Editor 2 Hidden Structures Revealed Deb Schmid Flight control surfaces include the flaps, tabs, Assistant Editor and spoilers that allow a pilot to adjust and Rob Leibold control an aircraft’s flight attitude. Using the Contributors Institute’s recently aquired powerful CT Barbara Bowen scanner, SwRI engineers imaged the aluminum Robert Crowe honeycomb control surface to visualize its Deborah Deffenbaugh D021911 internal structure. This 3-D visualization shows Maria Stothoff a bonding layer running through the structure. Design 8 New Horizons News Jessica Vidal Photography 10 The Methane Detectors Challenge Larry Walther Ian McKinney 14 Consortia News Circulation Stephanie Paredes 16 Pluto-Jupiter Infographic 18 SwRI Wins R&D 100 Awards Technology Today (ISSN 1528-431X) is published 19 TechBytes three times each year and distributed free of charge. -

NOAO Newsletter #101
NOAO/NSO Newsletter NATIONAL OPTICAL ASTRONOMY OBSERVATORY/NATIONAL SOLAR OBSERVATORY Issue 101 — March 2010 Science Highlights CTIO Instruments Available for 2010B ......................................... 22 Kitt Peak Observations Provide Solid Ground for Kepler ................. 2 Gemini Instruments Expected to be Available for 2010B .............. 23 Early Results from the NEWFIRM Medium-Band Survey ................. 3 Keck Instruments Available for 2010B ......................................... 24 The NOAO Outer Limits Survey: Stellar Populations in the MMT Instruments Available for 2010B ......................................... 24 Extremities of the Magellanic Clouds ......................................... 4 Magellan Instruments Available for 2010B .................................. 24 Evidence that Temporal Changes in Solar Subsurface Hale Instruments Available for 2010B ......................................... 24 Helicity Precede Active Region Flaring ....................................... 6 New NOAO Survey Programs Selected ......................................... 25 McMath-Pierce Observations of the Lunar Impact Third Quarter 2010 NSO Proposal Deadline .................................. 25 Plume from the LCROSS Mission ................................................. 8 NOAO Operations & Staff System Science Capabilities Director’s News .......................................................................... 26 Creating a Roadmap for the Ground-Based O/IR System............... 10 Ongoing Celebrations of Our 50th Anniversary -

Fungos Presentes Em Sedimentos Marinhos E Lacustres Da Antártica: Taxonomia, Diversidade E Bioprospecção De Metabólitos Bioativos
Universidade Federal de Minas Gerais Programa de Pós-Graduação em Microbiologia Fungos presentes em sedimentos marinhos e lacustres da Antártica: taxonomia, diversidade e bioprospecção de metabólitos bioativos Mayara Baptistucci Ogaki Belo Horizonte, MG 2019 Universidade Federal de Minas Gerais Programa de Pós-Graduação em Microbiologia Fungos presentes em sedimentos marinhos e lacustres da Antártica: taxonomia, diversidade e bioprospecção de metabólitos bioativos Tese apresentada ao programa de Pós-Graduação em Microbiologia do Instituto de Ciências Biológicas da Universidade Federal de Minas Gerais. Orientador: Dr. Luiz Henrique Rosa Departamento de Microbiologia/ICB, UFMG Belo Horizonte, MG 2019 Colaboradores: Dr. Carlos Augusto Rosa Departamento de Microbiologia/ICB, UFMG Dr. Carlos Leomar Zani Dra. Tânia Maria de Almeida Alves Centro de Pesquisas René Rachou, FIOCRUZ/MG Dra. Rosemary Vieira Dr. Arthur Ayres Universidade Federal Fluminense, RJ Dr. Juan Manoel Lírio Instituto Antartico Argentino, Buenos Aires, Argentina 043 Ogaki, Mayara Baptistucci. Fungos presentes em sedimentos marinhos e lacustres da Antártica: taxonomia, diversidade e bioprospecção de metabólitos bioativos [manuscrito] / Mayara Baptistucci Ogaki. – 2019. 212 f. : il. ; 29,5 cm. Orientador: Dr. Luiz Henrique Rosa. Tese (doutorado) – Universidade Federal de Minas Gerais, Instituto de Ciências Biológicas. Programa de Pós-Graduação em Microbiologia. 1. Microbiologia. 2. Regiões Antárticas. 3. Fungos. 4. Bioprospecção. 5. Biodiversidade. I. Rosa, Luiz Henrique. II. Universidade Federal de Minas Gerais. Instituto de Ciências Biológicas. III. Título. CDU: 579 Ficha Catalográfica elaborada por Fabiane C. M. Reis – CRB6/ 2680 Dedicatória Aos meus maiores apoios, “minha família e amigos”. Agradecimentos Agradeço a todo corpo docente e funcionários do programa de pós-graduação em Microbiologia e ao apoio financeiro do CNPq e CAPES pela concessão de minha bolsa de estudos e pelos subsídios que permitiram a concretização desta tese. -

Swri IR&D Program 2013
Internal Research and Development 2013 The SwRI IR&D Program exists to broaden the Institute's technology base and to encourage staff professional growth. Internal funding of research enables the Institute to advance knowledge, increase its technical capabilities, and expand its reputation as a leader in science and technology. The program also allows Institute engineers and scientists to continually grow in their technical fields by providing freedom to explore innovative and unproven concepts without contractual restrictions and expectations. Space Science Materials Research & Structural Mechanics Intelligent Systems, Advanced Computer & Electronic Technology, & Automation Measurement & Nondestructive Evaluation of Materials & Structures Engines, Fuels, Lubricants, & Vehicle Systems Geology & Nuclear Waste Management Fluid & Machinery Dynamics Electronic Systems & Instrumentation Chemistry & Chemical Engineering Copyright© 2014 by Southwest Research Institute. All rights reserved under U.S. Copyright Law and International Conventions. No part of this publication may be reproduced in any form or by any means, electronic or mechanical, including photocopying, without permission in writing from the publisher. All inquiries should be addressed to Communications Department, Southwest Research Institute, P.O. Drawer 28510, San Antonio, Texas 78228-0510, [email protected], fax (210) 522 -3547. 2013 IR&D | IR&D Home SwRI IR&D 2013 – Space Science Capability Development and Demonstration for Next-Generation Suborbital Research, 15-R8115 Development -
19680012850.Pdf
Research in Space Science SA0 Special Report No. 268 AN ANALYSIS OF THE MARINER 4 PHOTOGRAPHY OF MARS Clark R. Chapman, James €3. Pollack, and Carl Sagan February 14, 1968 % Smithsonian Institution A s tr o phy s ica1 Ob s e rvat ory Cambridge, Massachusetts 02138 708-1 1 TABLE OF CONTENTS Section Page ABSTRACT...... ........................... vi INTRODUCTION ............................. 1 A NEW REDUCTION OF THE CRATERING STATISTICS. 3 CRATER EROSION AND OBLITERATION . 17 SOURCES OF IMPACT CRATERS. 23 5 MAJOR TOPOGRAPHICAL FEATURES AS POSSIBLE CRATERS.................................. 33 6 EROSION MECHANISMS . 35 7 CRATERS AS SOURCES OF DUS-T . 51 8 CRATERAGES .............................. 53 9 VARIATION OF CRATER DENSITIES WITH POSITION ONMARS.. ................................ 55 10 RECOMMENDATIONS FOR FUTURE WORK. 59 11 ACKNOWLEDGMENTS . 61 REFERENCES ............................... 62 APPENDIXA ............................... ~-1 APPENDIXB ............................... B-1 BIOGRAPHICAL NOTES . LIST OF ILLUSTRATIONS Figure Page 1 Low-quality reproduction of Picture 4 of the Mariner 4 photographic sequence. 5 2 Sketch of the position of cataloged craters (Appendices A and B), Picture 4 of the Mariner 4 photographic sequence. 6 3 Low-quality reproduction of Picture 7 of the Mariner 4 photographic sequence. 7 4 Sketch of the position of cataloged craters (Appendices A and B), Picture 7 of the Mariner 4 photographic sequence. 8 5 Low-quality reproduction of Picture 11 of the Mariner 4 photographic sequence. 9 6 Sketch of the position of cataloged craters (Appendices A and B), Picture 11 of the Mariner 4 photographic sequence. 10 7 Diameter-frequency plot for Pictures 7 through 14, Qualities A and B (left); Pictures 7 to 11, Qualities A and B (center); and Pictures 7 and 11, Qualities A and B (right) . -

Appendix:. Maps of the Terrestrial Planets
APPENDIX Maps of the Terrestrial Planets Mercury SOUTH POLAR REGION SCALE 1 8388000 AT 56' LATITUDE POLAR STEREOGRAPHIC PROJECTION i \ \ \ \ .. \. 200 KILOMETERS 400 600 800 1000 NORTH POLAR REGION Mercury North 0 ZW KILOMETERS 400 600 800 1000 2W0 257. I 550. , 140. / / f30. r20. * / - - I +I". 1 1 / / / I North -GO'7 South SCALE 1 50000MO llmm 50 kml AT 0 LlT4TUDE MERCATOR PROlECTlON CONTOUR PLANET ELEVATION RADIUS l~~lornererrl IU~lometerrl 6063 Earth North Pole 278 South Pole 279 Earth Moon ' 1 "'rnl",,, , 'f 4 .I-.%, + I/>, ,,, /!v~00xu3 \\' 345 ! , , , 15 (15WI 0 NORTH POLAR REGION Moon Mars NORTH POLAR REGION Polar cap 81 11apparld on August 4. 1972 SOUTH POLAR REGION Polar cap as 11 sSWrd on February 28 1972 287 Mars 4u-t-t PLAt$ITIA F South SCALE 1 25.0m.0m A7 0' LATITUDE 1 12.549 CCO IT M' LATITUDE MERCITOR PROJLCTON m lorn ern CONTOUR lNTERYltL I KlLOMETRE 288 REFERENCES CHAPTER 1 Burns, J. A., 1976. Consequences of tidal slowing of Mercury: Icarus, v. 28, pp. 453-458. Beatty, J. K., B. O'Leary, and A. Chaikin, 1981. The New Solar Carr, M. H., L. S. Crumpler, J. A. Cutts, R. Greeley, J. E. System: Sky Publishing Corp., Cambridge, Mass. Guest, and H. Masursky, 1977. Martian impact craters and Shoemaker, E. M., 1962. Interpretation of lunar craters: Physics emplacement of ejecta by surface flow: J. Geophys. Res., v. 82, and Astronomy of the Moon (Kopal, Z., ed.), Academic Press, p. 4055. N.Y., pp. 283-359. Chapman, C. R., 1976. Chronology of terrestrial planet evolu- Shoemaker, E. -
Thedatabook.Pdf
THE DATA BOOK OF ASTRONOMY Also available from Institute of Physics Publishing The Wandering Astronomer Patrick Moore The Photographic Atlas of the Stars H. J. P. Arnold, Paul Doherty and Patrick Moore THE DATA BOOK OF ASTRONOMY P ATRICK M OORE I NSTITUTE O F P HYSICS P UBLISHING B RISTOL A ND P HILADELPHIA c IOP Publishing Ltd 2000 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the publisher. Multiple copying is permitted in accordance with the terms of licences issued by the Copyright Licensing Agency under the terms of its agreement with the Committee of Vice-Chancellors and Principals. British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. ISBN 0 7503 0620 3 Library of Congress Cataloging-in-Publication Data are available Publisher: Nicki Dennis Production Editor: Simon Laurenson Production Control: Sarah Plenty Cover Design: Kevin Lowry Marketing Executive: Colin Fenton Published by Institute of Physics Publishing, wholly owned by The Institute of Physics, London Institute of Physics Publishing, Dirac House, Temple Back, Bristol BS1 6BE, UK US Office: Institute of Physics Publishing, The Public Ledger Building, Suite 1035, 150 South Independence Mall West, Philadelphia, PA 19106, USA Printed in the UK by Bookcraft, Midsomer Norton, Somerset CONTENTS FOREWORD vii 1 THE SOLAR SYSTEM 1 -

National Aeronautics and Space Administration) 111 P HC AO,6/MF A01 Unclas CSCL 03B G3/91 49797
https://ntrs.nasa.gov/search.jsp?R=19780004017 2020-03-22T06:42:54+00:00Z NASA TECHNICAL MEMORANDUM NASA TM-75035 THE LUNAR NOMENCLATURE: THE REVERSE SIDE OF THE MOON (1961-1973) (NASA-TM-75035) THE LUNAR NOMENCLATURE: N78-11960 THE REVERSE SIDE OF TEE MOON (1961-1973) (National Aeronautics and Space Administration) 111 p HC AO,6/MF A01 Unclas CSCL 03B G3/91 49797 K. Shingareva, G. Burba Translation of "Lunnaya Nomenklatura; Obratnaya storona luny 1961-1973", Academy of Sciences USSR, Institute of Space Research, Moscow, "Nauka" Press, 1977, pp. 1-56 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION M19-rz" WASHINGTON, D. C. 20546 AUGUST 1977 A % STANDARD TITLE PAGE -A R.,ott No0... r 2. Government Accession No. 31 Recipient's Caafog No. NASA TIM-75O35 4.-"irl. and Subtitie 5. Repo;t Dote THE LUNAR NOMENCLATURE: THE REVERSE SIDE OF THE August 1977 MOON (1961-1973) 6. Performing Organization Code 7. Author(s) 8. Performing Organizotion Report No. K,.Shingareva, G'. .Burba o 10. Coit Un t No. 9. Perlform:ng Organization Nome and Address ]I. Contract or Grant .SCITRAN NASw-92791 No. Box 5456 13. T yp of Report end Period Coered Santa Barbara, CA 93108 Translation 12. Sponsoring Agiicy Noms ond Address' Natidnal Aeronautics and Space Administration 34. Sponsoring Agency Code Washington,'.D.C. 20546 15. Supplamortary No9 Translation of "Lunnaya Nomenklatura; Obratnaya storona luny 1961-1973"; Academy of Sciences USSR, Institute of Space Research, Moscow, "Nauka" Press, 1977, pp. Pp- 1-56 16. Abstroct The history of naming the details' of the relief on.the near and reverse sides 6f . -

HARVARD COLLEGE OBSERVATORY Cambridge, Massachusetts 02138
E HARVARD COLLEGE OBSERVATORY Cambridge, Massachusetts 02138 INTERIM REPORT NO. 2 on e NGR 22-007-194 LUNAR NOMENCLATURE Donald H. Menzel, Principal Investigator to c National Aeronautics and Space Administration Office of Scientific and Technical Information (Code US) Washington, D. C. 20546 17 August 1970 e This is the second of three reports to be submitted to NASA under Grant NGR 22-007-194, concerned with the assignment I of names to craters on the far-side of the Moon. As noted in the first report to NASA under the subject grant, the Working Group on Lunar Nomenclature (of Commission 17 of the International Astronomical Union, IAU) originally assigned the selected names to features on the far-side of the Moon in a . semi-alphabetic arrangement. This plan was criticized, however, by lunar cartographers as (1) unesthetic, and as (2) offering a practical danger of confusion between similar nearby names, par- ticularly in oral usage by those using the maps in lunar exploration. At its meeting in Paris on June 20 --et seq., the Working Group accepted the possible validity of the second criticism above and reassigned the names in a more or less random order, as preferred by the cartographers. They also deleted from the original list, submitted in the first report to NASA under the subject grant, several names that too closely resembled others for convenient oral usage. The Introduction to the attached booklet briefly reviews the solutions reached by the Working Group to this and several other remaining problems, including that of naming lunar features for living astronauts.