Guidelines for Timing Yellow and Red Intervals at Signalized Intersections
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Driver Understanding of the Flashing Yellow Arrow and Dynamic No Turn on Red Sign for Right Turn Applications
University of Massachusetts Amherst ScholarWorks@UMass Amherst Masters Theses Dissertations and Theses July 2018 Driver Understanding of the Flashing Yellow Arrow and Dynamic No Turn on Red Sign for Right Turn Applications Elizabeth Casola University of Massachusetts Amherst Follow this and additional works at: https://scholarworks.umass.edu/masters_theses_2 Part of the Transportation Engineering Commons Recommended Citation Casola, Elizabeth, "Driver Understanding of the Flashing Yellow Arrow and Dynamic No Turn on Red Sign for Right Turn Applications" (2018). Masters Theses. 631. https://doi.org/10.7275/11923057 https://scholarworks.umass.edu/masters_theses_2/631 This Open Access Thesis is brought to you for free and open access by the Dissertations and Theses at ScholarWorks@UMass Amherst. It has been accepted for inclusion in Masters Theses by an authorized administrator of ScholarWorks@UMass Amherst. For more information, please contact [email protected]. DRIVER UNDERSTANDING OF THE FLASHING YELLOW ARROW AND DYNAMIC NO TURN ON RED SIGN FOR RIGHT TURN APPLICATIONS A Thesis Presented by ELIZABETH CASOLA Submitted to the Graduate School of the University of Massachusetts Amherst in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN CIVIL ENGINEERING May 2018 Civil Engineering DRIVER UNDERSTANDING OF THE FLASHING YELLOW ARROW AND DYNAMIC NO TURN ON RED SIGN FOR RIGHT TURN APPLICATIONS A Thesis Presented by ELIZABETH CASOLA Approved as to style and content by: ____________________________ Michael A. Knodler Jr., Chair ____________________________ Eleni Christofa, Member ____________________________ Cole Fitzpatrick, Member ____________________________________ Richard N. Palmer, Department Head Civil and Environmental Engineering Department ABSTRACT DRIVER UNDERSTANDING OF THE FLASHING YELLOW ARROW AND DYNAMIC NO TURN ON RED SIGN FOR RIGHT TURN APPLICATIONS MAY 2018 ELIZABETH CASOLA, B.S., UNIVERSITY OF MASSACHUSETTS AMHERST M.S.C.E., UNIVERSITY OF MASSACHUSETTS AMHERST Directed by: Michael A. -
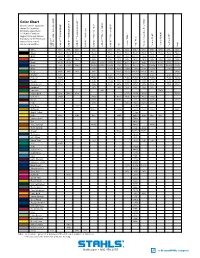
Color Chart ® ® ® ® Closest Pantone® Equivalent Shown
™ ™ II ® Color Chart ® ® ® ® Closest Pantone® equivalent shown. Due to printing limitations, colors shown 5807 Reflective ® ® ™ ® ® and Pantone numbers ® ™ suggested may vary from ac- ECONOPRINT GORILLA GRIP Fashion-REFLECT Reflective Thermo-FILM Thermo-FLOCK Thermo-GRIP ® ® ® ® ® ® ® tual colors. For the truest color ® representation, request Scotchlite our material swatches. ™ CAD-CUT 3M CAD-CUT CAD-CUT CAD-CUT CAD-CUT CAD-CUT CAD-CUT Felt Perma-TWILL Poly-TWILL Thermo-FILM Thermo-FLOCK Thermo-GRIP Vinyl Pressure Sensitive Poly-TWILL Sensitive Pressure CAD-CUT White White White White White White White White White* White White White White White Black Black Black Black Black Black Black Black Black* Black Black Black Black Black Gold 1235C 136C 137C 137C 123U 715C 1375C* 715C 137C 137C 116U Red 200C 200C 703C 186C 186C 201C 201C 201C* 201C 186C 186C 186C 200C Royal 295M 294M 7686C 2747C 7686C 280C 294C 294C* 294C 7686C 2758C 7686C 654C Navy 296C 2965C 7546C 5395M 5255C 5395M 276C 532C 532C* 532C 5395M 5255C 5395M 5395C Cool Gray Warm Gray Gray 7U 7539C 7539C 415U 7538C 7538C* 7538C 7539C 7539C 2C Kelly 3415C 341C 340C 349C 7733C 7733C 7733C* 7733C 349C 3415C Orange 179C 1595U 172C 172C 7597C 7597C 7597C* 7597C 172C 172C 173C Maroon 7645C 7645C 7645C Black 5C 7645C 7645C* 7645C 7645C 7645C 7449C Purple 2766C 7671C 7671C 669C 7680C 7680C* 7680C 7671C 7671C 2758U Dark Green 553C 553C 553C 447C 567C 567C* 567C 553C 553C 553C Cardinal 201C 188C 195C 195C* 195C 201C Emerald 348 7727C Vegas Gold 616C 7502U 872C 4515C 4515C 4515C 7553U Columbia 7682C 7682C 7459U 7462U 7462U* 7462U 7682C Brown Black 4C 4675C 412C 412C Black 4C 412U Pink 203C 5025C 5025C 5025C 203C Mid Blue 2747U 2945U Old Gold 1395C 7511C 7557C 7557C 1395C 126C Bright Yellow P 4-8C Maize 109C 130C 115U 7408C 7406C* 7406C 115U 137C Canyon Gold 7569C Tan 465U Texas Orange 7586C 7586C 7586C Tenn. -

DMV Driver Manual
New Hampshire Driver Manual i 6WDWHRI1HZ+DPSVKLUH DEPARTMENT OF SAFETY DIVISION OF MOTOR VEHICLES MESSAGE FROM THE DIVISION OF MOTOR VEHICLES Driving a motor vehicle on New Hampshire roadways is a privilege and as motorists, we all share the responsibility for safe roadways. Safe drivers and safe vehicles make for safe roadways and we are pleased to provide you with this driver manual to assist you in learning New Hampshire’s motor vehicle laws, rules of the road, and safe driving guidelines, so that you can begin your journey of becoming a safe driver. The information in this manual will not only help you navigate through the process of obtaining a New Hampshire driver license, but it will highlight safe driving tips and techniques that can help prevent accidents and may even save a life. One of your many responsibilities as a driver will include being familiar with the New Hampshire motor vehicle laws. This manual includes a review of the laws, rules and regulations that directly or indirectly affect you as the operator of a motor vehicle. Driving is a task that requires your full attention. As a New Hampshire driver, you should be prepared for changes in the weather and road conditions, which can be a challenge even for an experienced driver. This manual reviews driving emergencies and actions that the driver may take in order to avoid a major collision. No one knows when an emergency situation will arise and your ability to react to a situation depends on your alertness. Many factors, such as impaired vision, fatigue, alcohol or drugs will impact your ability to drive safely. -

Texas Driver Handbook 2017
Texas Department of Public Safety Texas Driver Handbook Driver License Division Revised September 2017 This publication is FREE Introduction The Texas Department of Public Safety, Driver License Division, is committed to creating a faster, easier, and friendlier driver license experience and a safer Texas. One step toward achieving these important goals is to continu- ously improve the Texas Driver Handbook by providing you with accurate information on traffic laws, clear images of road signs, examples of common driving situations, and general safety tips. We have also included special tips to emphasize important information you need to know. Although the Texas Driver Handbook has been revised, its primary purpose remains the same: 1) to help you qualify for a Texas driver license, and 2) to help you become a safer driver. The information contained in this handbook is not an official legal reference to Texas traffic laws. The information provided is only intended to explain applicable federal and state laws you need to understand in order to success- fully operate a motor vehicle in Texas. If you would like to know the actual language of any traffic or criminal laws referenced in this handbook, please refer to the Texas Transportation Code and Texas Penal Code. Once you receive your Texas driver license, keep this handbook as a reference on traffic safety and update it as needed. The Texas Legislature meets every two years and regularly makes changes to traffic laws. For the most cur- rent information on driver licensing visit our website at http://www.dps.texas.gov/DriverLicense/. Contact Us Please contact us if you have any questions regarding this handbook or if you need additional information. -

A Survey of Use of Left-Turn-On-Red;" KYP-75-70; HPR-PL-1(11), Part III-B
COMMONWEALTH OF KENTUCI<Y DEPARTMENT OF TRANSPORTATION JULIAN M. CARROLL C. ROBERTS JOHN BUREAU OF HIGHWAYS GOVERNOR SECRETARY JOHN C. ROBERTS COMMISSIONER H-3-70 Division of Research 533 South Limestone Lexington, KY 40508 May II, 1976 MEMORANDUM TO: G. F. Kemper State Highway Engineer Chairman, Research Committee SUBJECT: Research Report No. 446; "A Survey of Use of Left-Turn-on-Red;" KYP-75-70; HPR-PL-1(11), Part III-B When it was learned that a bill was prefiled before the 1976 General Assembly which would allow left-turn-on-red (LTOR) at intersecting, one-way streets, we initiated a survey of practices and experiences across the country and forwarded a summary to W. B. Drake and to the Division of Traffic on January 26. Respondents to our inquiries requested feedback from the survey also. We have, therefore, documented the information in a more usable way and for any future needs that may arise. The bill was defeated in the Senate Judiciary-Statutes Committee. Respectfully J~ «"'' ) ~-J/~ .. Jas_ H. Havens Director of Research JHH:gd En c. cc 1s: Research Committee Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. 4. Title and Subtitle 5. Report Dote May 1976 A Survey of Use of Left-Turn-on-Red 6. Performing Organization Code 8. Performing Organization Report No. 7. Author/ s) Kenneth R. Agent 446 9, Performing Organization Nome and Address 10. Work Unit No. (TRAIS) Division of Research Kentucky Bureau of Highways 11. Contract or Grant No. 533 South Limestone Street KYP-75-70 Lexington, Kentucky 40508 13. -
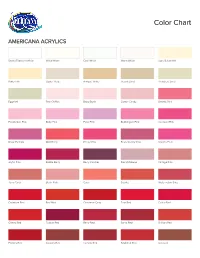
Color Chart Colorchart
Color Chart AMERICANA ACRYLICS Snow (Titanium) White White Wash Cool White Warm White Light Buttermilk Buttermilk Oyster Beige Antique White Desert Sand Bleached Sand Eggshell Pink Chiffon Baby Blush Cotton Candy Electric Pink Poodleskirt Pink Baby Pink Petal Pink Bubblegum Pink Carousel Pink Royal Fuchsia Wild Berry Peony Pink Boysenberry Pink Dragon Fruit Joyful Pink Razzle Berry Berry Cobbler French Mauve Vintage Pink Terra Coral Blush Pink Coral Scarlet Watermelon Slice Cadmium Red Red Alert Cinnamon Drop True Red Calico Red Cherry Red Tuscan Red Berry Red Santa Red Brilliant Red Primary Red Country Red Tomato Red Naphthol Red Oxblood Burgundy Wine Heritage Brick Alizarin Crimson Deep Burgundy Napa Red Rookwood Red Antique Maroon Mulberry Cranberry Wine Natural Buff Sugared Peach White Peach Warm Beige Coral Cloud Cactus Flower Melon Coral Blush Bright Salmon Peaches 'n Cream Coral Shell Tangerine Bright Orange Jack-O'-Lantern Orange Spiced Pumpkin Tangelo Orange Orange Flame Canyon Orange Warm Sunset Cadmium Orange Dried Clay Persimmon Burnt Orange Georgia Clay Banana Cream Sand Pineapple Sunny Day Lemon Yellow Summer Squash Bright Yellow Cadmium Yellow Yellow Light Golden Yellow Primary Yellow Saffron Yellow Moon Yellow Marigold Golden Straw Yellow Ochre Camel True Ochre Antique Gold Antique Gold Deep Citron Green Margarita Chartreuse Yellow Olive Green Yellow Green Matcha Green Wasabi Green Celery Shoot Antique Green Light Sage Light Lime Pistachio Mint Irish Moss Sweet Mint Sage Mint Mint Julep Green Jadeite Glass Green Tree Jade -
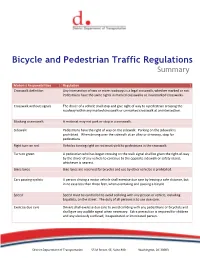
DC Bicycle and Pedestrian Traffic Regulations Summary
Bicycle and Pedestrian Traffic Regulations Summary Motorist Responsibilities Regulation Crosswalk definition Any intersection of two or more roadways is a legal crosswalk, whether marked or not. Pedestrians have the same rights in marked crosswalks as in unmarked crosswalks. Crosswalk without signals The driver of a vehicle shall stop and give right of way to a pedestrian crossing the roadway within any marked crosswalk or unmarked crosswalk at an intersection. Blocking a crosswalk A motorist may not park or stop in a crosswalk. Sidewalk Pedestrians have the right of way on the sidewalk. Parking on the sidewalk is prohibited. When driving over the sidewalk at an alley or driveway, stop for pedestrians. Right turn on red Vehicles turning right on red must yield to pedestrians in the crosswalk Turn on green A pedestrian who has begun crossing on the walk signal shall be given the right-of-way by the driver of any vehicle to continue to the opposite sidewalk or safety island, whichever is nearest. Bikes lanes Bike lanes are reserved for bicycles and use by other vehicles is prohibited. Cars passing cyclists A person driving a motor vehicle shall exercise due care by leaving a safe distance, but in no case less than three feet, when overtaking and passing a bicycle Speed Speed must be controlled to avoid colliding with any person or vehicle, including bicyclists, on the street. The duty of all persons is to use due care. Exercise due care Drivers shall exercise due care to avoid colliding with any pedestrians or bicyclists and shall give any audible signal when necessary. -

BWSR Featured Plant: Downy Yellow Violet
2019 June Plant of the Month BWSR Featured Plant Name: Downy yellow violet (Viola pubescens) Plant family: Violet (Violaceae) Downy yellow Downy yellow violet, AKA hairy yellow violets are an important early violet or smooth yellow violet, is food source for a short (4- to 12-inch-tall), native, pollinators. Fine hairs along the herbaceous perennial that blooms in rounded teeth woodlands, gardens edge of the leaf are a distinguishing and shady areas Plant Stats feature. Brown lines starting in April. It STATEWIDE on the flower petals provides an early lead pollinators to WETLAND nectar and pollen. splash of color and INDICATOR Photo Credits: important early STATUS: FACU Heather Holm season nectar and PRIMARY USES: pollen. Like other Ground cover, shade/pollinator Viola species, this gardens, edibles, plant produces both woodland showy, open cross- restorations pollinating flowers at the top of the plant, and fully closed, self-pollinating flowers that may be found aboveground or underground. The showy flowers bloom before trees leaf out. The closed flowers bloom once the tree canopy leafs out. Planting Recommendations Range Downy yellow violets and can be used as Downy yellow violet is found may not be as an alternative to turf throughout Minnesota. Records aggressive as some grass, along paths and exist in all but a handful of other violets in a woodland borders, counties. It is mostly found east garden, but will spread and can be mixed with of the Missouri River, with a few over time in ideal other short woodland records west of the Missouri. conditions — part plants such as sedges, Its range stretches into New shade and medium to anemones and wild England and north into central dry soils. -

Virginia DMV Learner's Permit Test Online Practice Questions Www
Virginia DMV Learner’s Permit Test Online Practice Questions www.dmvnow.com 2.1 Traffic Signals 1. When you encounter a red arrow signal, you may turn after you come to a complete stop and look both ways for traffic and pedestrians. a. True b. False 2. Unless directed by a police officer, you must obey all signs and signals. a. True b. False 3. When you see a flashing yellow traffic signal at the intersection up ahead, what should you do? a. Slow down and proceed with caution. b. Come to a complete stop before proceeding. c. Speed up before the light changes to red. d. Maintain speed since you have the right-of-way. 4. When you encounter a flashing red light at an intersection, what should you do? a. Be alert for an oncoming fire engine or ambulance ahead. b. Slow down and proceed with caution. c. Come to a complete stop before proceeding. d. Speed up before the light changes to red. 5. When can you legally make a right turn at a red traffic signal? a. After stopping, if no sign prohibits right turn on red. b. When the traffic light first changes. c. At any time. d. In daylight hours only. 1 6. Avoiding traffic controls by cutting through a parking lot or field is perfectly legal. a. True b. False 7. Pedestrians do not have to obey traffic signals. a. True b. False 8. At a red light, where must you come to a complete stop? a. 100 feet before the intersection. b. -

Red Yellow Blue Worksheets (Pdf)
Red Yellow Blue By Lysa Mullady Follow Up Activity and Worksheets for Elementary Students Red Yellow Blue By Lysa Mullady Red Yellow Blue is a book that supports social and emotional learning. It explores a wide range of feelings and the importance of cooperation. When discussing feelings in the classroom, it is important to: § Validate that all feelings are ok. § Teach the importance of talking out your feelings with a trusted person as a means of coping with difficult emotions. § Make the connection between the emotion and the event that caused it. Cooperation is the action of working together towards a common goal. Working together makes a job easier and gives everyone involved positive feelings of accomplishment and belonging. Kids show cooperation by: § Listening not only to instructions, but to other members of the group. § Being wiling to take turns and share when necessary. § Being able to compromise, to change their point of view based on the ideas of the group. § Using encouraging words. § Appreciating what others do. Red Yellow Blue Paper Chain Cooperation Class Activity Objectives: § The students will be able to define cooperation. § The students will be able to list actions that show cooperation. § The students will be able to work demonstrate cooperation by working together to create a paper chain. Materials: Copy and cut our the strips of paper. Each student should receive three strips, one with each character. If possible, make copies on red, yellow and blue paper or have the students color the strips red, yellow and blue. You will also need chart paper or a white board to list student responses. -
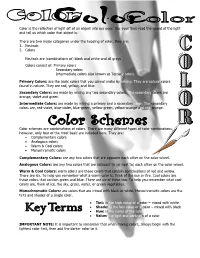
Color Schemes Are Combinations of Colors
Color is the reflection of light off of an object into our eyes. Our eyes then read the speed of the light and tell us which color that object is. There are two major categories under the heading of color, they are: 1. Neutrals 2. Colors Neutrals are (combinations of) black and white and all grays Colors consist of: Primary colors Secondary colors Intermediate colors also known as Tertiary colors Primary Colors: are the basic colors that you cannot make by mixing. They are natural colors found in nature. They are red, yellow, and blue. Secondary Colors: are made by mixing any two secondary colors. The secondary colors are orange, violet and green. Intermediate Colors: are made by mixing a primary and a secondary color. The secondary colors are, red-violet, blue-violet, blue-green, yellow-green, yellow-orange and red-orange. Color schemes are combinations of colors. There are many different types of color combinations, however, only four of the most basic are included here. They are: • Complementary colors • Analogous colors • Warm & Cool colors • Monochromatic colors Complementary Colors: are any two colors that are opposite each other on the color wheel. Analogous Colors: are any two colors that are adjacent to (or next to) each other on the color wheel. Warm & Cool Colors: warm colors are those colors that contain combinations of red and yellow. There are six. To help you remember what a warm color is, think of the sun or fire. Cool colors are those colors that contain green and blue. There are six of these too. -

Paint Pigments— Yellow
» TECHNICAL INFORMATION ON BUILDING MATERIALS TIBM - 32 FOR UfSE IN THE DESIGN OF LOW-COST HOUSING ***** THE NATIONAL BUREAU OF STANDARDS UNITED STATES DEPARTMENT OF COMMERCE WASHINGTON, D. C. August 29, 1936 PAINT PIGMENTS— YELLOW, . BROWN, BLUE, GREEN, AND BRONZE This is urimarily^a digest of the sections of Bureau of Standards Circular No, o9> "Paint and Varnish", (November 17, 1917),'*' and Tech- nologic Paper No. 274, "Use of United States Government Suecif ication Paints and Faint Materials", (December 15, 1924), ^ Ly p, H. Walker and E. F. Hickson, dealing with general composition , characteristics, and uses of yellow, brown, blue, green, and bronze pigments. The following papers contain additional information relative to paint pigments, oil paints, and water paints: TIBM - 30 "Paint Pigments—White" TIBM - 31 "Paint Pigments—Black, Red, and Lakes" TIBM - 33 "Federal Specification . Paint Pigments and Mixing Formulas" TIM - 3U "Federal Specification Ready-Mixed Paints, Semi- paste Paints and Mixing Formulas’"' TIBM - 35 "Preparation of Paints from Paste and Dry Pigments" TIBM - 36 "Preparation of Paints from Semipaste Paints, Thinning Ready-Mixed Paints, and Preparation of Water Paints" TIBM - 43 "Aluminum Paints" Pigments are "the fine solid warticles used in the preparation of paint, and substantially insoluble in the vehicle, "3 In general, it may be ^Out of print. May be consulted in Government depositor}*- libraries. p Available from Superintendent of Documents, Government Printing Office, Washington, D. C. .(Price 10 cents). ^Qpioted from "Standard Definitions of Terms Relating to Paint 'Specifications", American Society for Testing Materials ( 1 93 3 ) ’ • • -• •• PP. 735-73 9 . 031736-C - 1 - assumed that pigments composed of very fine particles, having high re- fractive indices, provide the greatest covering power and opacity.