Driver Understanding of the Flashing Yellow Arrow and Dynamic No Turn on Red Sign for Right Turn Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DMV Driver Manual
New Hampshire Driver Manual i 6WDWHRI1HZ+DPSVKLUH DEPARTMENT OF SAFETY DIVISION OF MOTOR VEHICLES MESSAGE FROM THE DIVISION OF MOTOR VEHICLES Driving a motor vehicle on New Hampshire roadways is a privilege and as motorists, we all share the responsibility for safe roadways. Safe drivers and safe vehicles make for safe roadways and we are pleased to provide you with this driver manual to assist you in learning New Hampshire’s motor vehicle laws, rules of the road, and safe driving guidelines, so that you can begin your journey of becoming a safe driver. The information in this manual will not only help you navigate through the process of obtaining a New Hampshire driver license, but it will highlight safe driving tips and techniques that can help prevent accidents and may even save a life. One of your many responsibilities as a driver will include being familiar with the New Hampshire motor vehicle laws. This manual includes a review of the laws, rules and regulations that directly or indirectly affect you as the operator of a motor vehicle. Driving is a task that requires your full attention. As a New Hampshire driver, you should be prepared for changes in the weather and road conditions, which can be a challenge even for an experienced driver. This manual reviews driving emergencies and actions that the driver may take in order to avoid a major collision. No one knows when an emergency situation will arise and your ability to react to a situation depends on your alertness. Many factors, such as impaired vision, fatigue, alcohol or drugs will impact your ability to drive safely. -

Texas Driver Handbook 2017
Texas Department of Public Safety Texas Driver Handbook Driver License Division Revised September 2017 This publication is FREE Introduction The Texas Department of Public Safety, Driver License Division, is committed to creating a faster, easier, and friendlier driver license experience and a safer Texas. One step toward achieving these important goals is to continu- ously improve the Texas Driver Handbook by providing you with accurate information on traffic laws, clear images of road signs, examples of common driving situations, and general safety tips. We have also included special tips to emphasize important information you need to know. Although the Texas Driver Handbook has been revised, its primary purpose remains the same: 1) to help you qualify for a Texas driver license, and 2) to help you become a safer driver. The information contained in this handbook is not an official legal reference to Texas traffic laws. The information provided is only intended to explain applicable federal and state laws you need to understand in order to success- fully operate a motor vehicle in Texas. If you would like to know the actual language of any traffic or criminal laws referenced in this handbook, please refer to the Texas Transportation Code and Texas Penal Code. Once you receive your Texas driver license, keep this handbook as a reference on traffic safety and update it as needed. The Texas Legislature meets every two years and regularly makes changes to traffic laws. For the most cur- rent information on driver licensing visit our website at http://www.dps.texas.gov/DriverLicense/. Contact Us Please contact us if you have any questions regarding this handbook or if you need additional information. -

A Survey of Use of Left-Turn-On-Red;" KYP-75-70; HPR-PL-1(11), Part III-B
COMMONWEALTH OF KENTUCI<Y DEPARTMENT OF TRANSPORTATION JULIAN M. CARROLL C. ROBERTS JOHN BUREAU OF HIGHWAYS GOVERNOR SECRETARY JOHN C. ROBERTS COMMISSIONER H-3-70 Division of Research 533 South Limestone Lexington, KY 40508 May II, 1976 MEMORANDUM TO: G. F. Kemper State Highway Engineer Chairman, Research Committee SUBJECT: Research Report No. 446; "A Survey of Use of Left-Turn-on-Red;" KYP-75-70; HPR-PL-1(11), Part III-B When it was learned that a bill was prefiled before the 1976 General Assembly which would allow left-turn-on-red (LTOR) at intersecting, one-way streets, we initiated a survey of practices and experiences across the country and forwarded a summary to W. B. Drake and to the Division of Traffic on January 26. Respondents to our inquiries requested feedback from the survey also. We have, therefore, documented the information in a more usable way and for any future needs that may arise. The bill was defeated in the Senate Judiciary-Statutes Committee. Respectfully J~ «"'' ) ~-J/~ .. Jas_ H. Havens Director of Research JHH:gd En c. cc 1s: Research Committee Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. 4. Title and Subtitle 5. Report Dote May 1976 A Survey of Use of Left-Turn-on-Red 6. Performing Organization Code 8. Performing Organization Report No. 7. Author/ s) Kenneth R. Agent 446 9, Performing Organization Nome and Address 10. Work Unit No. (TRAIS) Division of Research Kentucky Bureau of Highways 11. Contract or Grant No. 533 South Limestone Street KYP-75-70 Lexington, Kentucky 40508 13. -
DC Bicycle and Pedestrian Traffic Regulations Summary
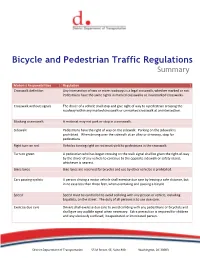
Bicycle and Pedestrian Traffic Regulations Summary Motorist Responsibilities Regulation Crosswalk definition Any intersection of two or more roadways is a legal crosswalk, whether marked or not. Pedestrians have the same rights in marked crosswalks as in unmarked crosswalks. Crosswalk without signals The driver of a vehicle shall stop and give right of way to a pedestrian crossing the roadway within any marked crosswalk or unmarked crosswalk at an intersection. Blocking a crosswalk A motorist may not park or stop in a crosswalk. Sidewalk Pedestrians have the right of way on the sidewalk. Parking on the sidewalk is prohibited. When driving over the sidewalk at an alley or driveway, stop for pedestrians. Right turn on red Vehicles turning right on red must yield to pedestrians in the crosswalk Turn on green A pedestrian who has begun crossing on the walk signal shall be given the right-of-way by the driver of any vehicle to continue to the opposite sidewalk or safety island, whichever is nearest. Bikes lanes Bike lanes are reserved for bicycles and use by other vehicles is prohibited. Cars passing cyclists A person driving a motor vehicle shall exercise due care by leaving a safe distance, but in no case less than three feet, when overtaking and passing a bicycle Speed Speed must be controlled to avoid colliding with any person or vehicle, including bicyclists, on the street. The duty of all persons is to use due care. Exercise due care Drivers shall exercise due care to avoid colliding with any pedestrians or bicyclists and shall give any audible signal when necessary. -

Virginia DMV Learner's Permit Test Online Practice Questions Www
Virginia DMV Learner’s Permit Test Online Practice Questions www.dmvnow.com 2.1 Traffic Signals 1. When you encounter a red arrow signal, you may turn after you come to a complete stop and look both ways for traffic and pedestrians. a. True b. False 2. Unless directed by a police officer, you must obey all signs and signals. a. True b. False 3. When you see a flashing yellow traffic signal at the intersection up ahead, what should you do? a. Slow down and proceed with caution. b. Come to a complete stop before proceeding. c. Speed up before the light changes to red. d. Maintain speed since you have the right-of-way. 4. When you encounter a flashing red light at an intersection, what should you do? a. Be alert for an oncoming fire engine or ambulance ahead. b. Slow down and proceed with caution. c. Come to a complete stop before proceeding. d. Speed up before the light changes to red. 5. When can you legally make a right turn at a red traffic signal? a. After stopping, if no sign prohibits right turn on red. b. When the traffic light first changes. c. At any time. d. In daylight hours only. 1 6. Avoiding traffic controls by cutting through a parking lot or field is perfectly legal. a. True b. False 7. Pedestrians do not have to obey traffic signals. a. True b. False 8. At a red light, where must you come to a complete stop? a. 100 feet before the intersection. b. -

Driver's Exam Study Guide
DRIVER’S EXAM STUDY GUIDE REVIEW QUESTIONS AND ANSWERS FOR STUDY THESE QUESTIONS ARE FOR SUPPORT AND REVIEW PURPOSES ONLY. THE NJ EXAMINATION IS TAKEN FROM THE NJ DRIVERS MANUAL.THE MANUAL CAN BE FOUND ONLINE AT NJMVC.GOV OR OBTAINED AT ANY MOTOR VEHICLE AGENCY PLEASE READ AND STUDY THE NJ MANUAL BEFORE TAKING THE TEST! 1. The NJ speed limit in a business or residential area, unless otherwise posted is? 25 mph 2. The speed limit in a school zone, unless otherwise posted is? 25 mph 3. Double solid yellow lines in the center of the road means: Traffic going in opposite directions and no passing. 4. When the roadway has solid and a broken yellow line in the center, it means: Traffic going in opposite directions, passing on the broken side only. 5. When is passing on the right allowed? Two or more continuous lanes of traffic going in the same direction or when the driver in front of you is turning left. 6. NJ law requires that you keep to the right unless: Passing 7. You should always yield to emergency vehicles that are lighted by: Moving to the right side of the road and stopping. 8. A single solid white line across the road at an intersection means: Motorists must stop behind line for a STOP sign or RED light. 9. At and uncontrolled intersection (no signs or signals) it is good practice to: Slow, look both ways, and be prepared to stop. 10. What is a deceleration lane? An extra lane on a highway to slow for the exit. -
Safety Impact of Permitting Right- Turn-On-Red
Safety Impact of U.S. Department of Transportation Permitting Right- National Highway * Traffic Safety Administration Turn-On-Red * A Report to Congress By the National Highway Traffic Safety Administration December 1994 No Turn On Red * ri,i^,,rt %ti:i' IIrcp:tr:ri I,\ ,Iti• Technical Report Documentation Paae 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. DOT HS 808 4. Title and Subtitle 5. Report Date Safety Impact of Permitting Right-Turn-On-Red: December 1994 A Report to Congress By the National Highway Traffic 6. Performing Organization Code Safety Administration NTS-33 8. Performing Organization Report No. 7. Author(s) Richard P. Com ton and Edward V. Milton 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Evaluation Division 11. Contract or Grant No. Office of Program Development and Evaluation Traffic Safety Programs 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Report to Congress National Highway Traffic Safety Administration 400 Seventh Street, S.W. 14. Sponsoring Agency Code Washington, D.C. 20590 15. Supplementary Notes Analysis of FARS and State Crash records was performed by the National Center for Statistical Analysis 16. Abstract The Energy Policy Act of 1992 required NHTSA to conduct a study of the safety impact of permitting right and left turns on red lights. This report presents a brief summary of the current status of State implementation of laws permitting right and left turns at red lights, a brief review of previous research, and presents the results of analyses of currently available data assessing the safety impact of permitting right turns on red. -

Turn on Red Hugh W
66 driver performance for type A versus type B mark- follorving primary conclusions were made: ings at this location. At AA I the hypothesis was re- jected on weekdays, but could not be rejected on week- 1. Driver performance did not differ significantly ends. Hence, at this location, we concluded that there between the two types of markings for locations where was significant difference in driver performance on the turns were made into collector streets; weekdays, but no significant diIference on the weekends 2. Driver performanee differed significantly be- for type A and B markings. tween the two types of markings on weekdays but not Next we needed to detelmine which type of marking on rveekends at AA I; produced the better driver performance, According to 3. Driver performance differed significantly be- the function of the street the vehicle tu'ned into, the tween the two types of markings at the AA II location; four locations lvere put into two corresponding cate- 4, When turning movements wefe executed into a gories (locations AC I and AC II were categorized as collector street, driver performance during the day did the collector streets and locations AA I and AA II as not differ significantly betrveen the two types of mark- arterial streets). Comparison of daytime and niglrttirne ings; driver performance for the trvo categories was ex- 5. When turning movements were executed into an amined. arterial street, driver performance differed signifi- The tabulation below shows that the new marking cantly between the trvo types of markings, and type B produces significantly better performance during the marking produced better driver performance; night; during the day, it produces significantly better 6. -
Arkansas Driver License Study Guide
ARKANSAS DRIVER LICENSE STUDY GUIDE VOLUME 1 – EDITION 8 January 2017 LITTERING: IT’S AGAINST THE LAW. With a driver license comes the responsibility of being familiar with the laws of the road. As a driver you are accountable for what may be thrown from the vehicle onto a city street or state highway. 8-6-404 PENALTIES (a)(1)(A)(i) A person convicted of a violation of § 8-6-406 or § 8-6-407 for a first offense shall be guilty of an unclassified misdemeanor and shall be fined in an amount of not less than one hundred dollars ($100) and not more than one thousand dollars ($1,000). (ii) An additional sentence of not more than eight (8) hours of community service shall be imposed under this subdivision (a) (1) (A). (B)(i) A person convicted of a violation of § 8-6-406 or § 8-6- court shall have his or he r driver's license suspended for six 407 for a second or subsequent offense within three (3) years (6) months by the Department of Finance and Administration, of the first offense shall be guilty of an unclassified upon receipt of an order of denial of driving privileges from the misdemeanor and shall be fined in an amount of not less than court pursuant to this section. two hundred dollars ($200) and not more than two thousand 8-6-407 COMMERCIAL REFUSE HAULING BY dollars ($2,000). UNCOVERED VEHICLES (ii) An additional sentence of not more than twenty-four (24) It shall be unlawful for any person engaged in commercial or hours of community service may be imposed under this for-hire hauling to operate any truck or other vehicle within subdivision (a) (1) (B). -

Arkansas Driver License Study Guide
ARKANSAS DRIVER LICENSE STUDY GUIDE VOLUME 1 – EDITION 8 January 2018 LITTERING: IT’S AGAINST THE LAW. With a driver license comes the responsibility of being familiar with the laws of the road. As a driver you are accountable for what may be thrown from the vehicle onto a city street or state highway. 8-6-404 PENALTIES (a)(1)(A)(i) A person convicted of a violation of § 8-6-406 or § 8-6-407 for a first offense shall be guilty of an unclassified misdemeanor and shall be fined in an amount of not less than one hundred dollars ($100) and not more than one thousand dollars ($1,000). (ii) An additional sentence of not more than eight (8) hours of community service shall be imposed under this subdivision (a) (1) (A). (B)(i) A person convicted of a violation of § 8-6-406 or § 8-6- court pursuant to this section. 407 for a second or subsequent offense within three (3) years 8-6-407 COMMERCIAL REFUSE HAULING BY of the first offense shall be guilty of an unclassified UNCOVERED VEHICLES misdemeanor and shall be fined in an amount of not less than It shall be unlawful for any person engaged in commercial or two hundred dollars ($200) and not more than two thousand for-hire hauling to operate any truck or other vehicle within dollars ($2,000). this state to transport litter, trash, or garbage unless the (ii) An additional sentence of not more than twenty-four (24) vehicle is covered to prevent its contents from blowing, hours of community service may be imposed under this dropping, falling off, or otherwise departing from the vehicle. -

Driver's Licensing Handbook
DRIVER’SDRIVER’S LICENSING HANDBOOK STATE OF WEST VIRGINIA Revised 02/2021 DEPARTMENT OF TRANSPORTATION DIVISION OF MOTOR VEHICLES PO Box 17010 5707 MacCorkle Avenue, SE Charleston, WV 25317 Before you call, please have your license plate number, driver’s license number, and/or your file number ready so that we can assist you as quickly as possible. For Vehicle Title, License Plate, Driver’s License issues, or for General Information (304) 926‑3499 / (800) 642‑9066 | Hearing‑Impaired ‑ (800) 742‑6991 Other Important Telephone Numbers (Area Code 304) Driver’s License ................................................................................................. 926‑3801 Point System .................................................................................................... 926‑2505 Student Attendance ......................................................................................... 926‑2505 Unpaid Tickets .................................................................................................. 926‑2505 Driving Records ................................................................................................ 926‑3952 Compulsory Insurance ...................................................................................... 926‑3802 Driving Under the Influence .............................................................................. 926‑2506 Driving Under the Influence “Interlock” ............................................................ 926‑2507 Visit us on the web at dmv.wv.gov. Need help with reading -

Florida Driver License Handbook
OFFICIAL FLORIDA DRIVER LICENSE HANDBOOK INTRODUCTION The Official Florida Driver License Handbook is produced by the Florida Department of Highway Safety and Motor Vehicles (FLHSMV). This guide has the information you need to prepare for the Florida Driver License Class E Knowledge Exam and Driving Skills Test and to help you drive safely and lawfully. DISCLAIMER The Official Florida Driver License Handbook contains many condensed and paraphrased points of Florida laws and provides safety advice not specifically addressed in the laws. The handbook is not a legal authority and is not intended for use in court. This handbook will not reflect any changes made by the Florida Legislature after the last revision date (located at the bottom of this page). WARNING Florida law prohibits using a false name, making a false statement, concealing a material fact or otherwise using fraud in an application for a driver license or ID card. The penalty can be up to five years in prison, a $5,000 fine, and suspension of any existing driving privilege for at least one year. In addition, it is illegal to permit or authorize an unlicensed person to drive a motor vehicle and doing so can result in a 60 day jail sentence and a $500 fine. If the vehicle is involved in a crash resulting in bodily injury or death of any person, the person who permitted the unlicensed person to drive may (unless this is an automatic mandatory suspension) have his/her license suspended for one year. PUBLIC RECORDS Florida law requires the FLHSMV to collect certain personal information during the licensing process.