Hydrodynamic Modeling of Narragansett Bay in Support of the Ecogem Ecological Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
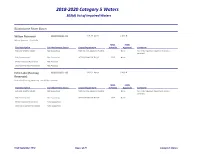
2018-2020 Category 5 Waters 303(D) List of Impaired Waters
2018-2020 Category 5 Waters 303(d) List of Impaired Waters Blackstone River Basin Wilson Reservoir RI0001002L-01 109.31 Acres CLASS B Wilson Reservoir. Burrillville TMDL TMDL Use Description Use Attainment Status Cause/Impairment Schedule Approval Comment Fish and Wildlife habitat Not Supporting NON-NATIVE AQUATIC PLANTS None No TMDL required. Impairment is not a pollutant. Fish Consumption Not Supporting MERCURY IN FISH TISSUE 2025 None Primary Contact Recreation Not Assessed Secondary Contact Recreation Not Assessed Echo Lake (Pascoag RI0001002L-03 349.07 Acres CLASS B Reservoir) Echo Lake (Pascoag Reservoir). Burrillville, Glocester TMDL TMDL Use Description Use Attainment Status Cause/Impairment Schedule Approval Comment Fish and Wildlife habitat Not Supporting NON-NATIVE AQUATIC PLANTS None No TMDL required. Impairment is not a pollutant. Fish Consumption Not Supporting MERCURY IN FISH TISSUE 2025 None Primary Contact Recreation Fully Supporting Secondary Contact Recreation Fully Supporting Draft September 2020 Page 1 of 79 Category 5 Waters Blackstone River Basin Smith & Sayles Reservoir RI0001002L-07 172.74 Acres CLASS B Smith & Sayles Reservoir. Glocester TMDL TMDL Use Description Use Attainment Status Cause/Impairment Schedule Approval Comment Fish and Wildlife habitat Not Supporting NON-NATIVE AQUATIC PLANTS None No TMDL required. Impairment is not a pollutant. Fish Consumption Not Supporting MERCURY IN FISH TISSUE 2025 None Primary Contact Recreation Fully Supporting Secondary Contact Recreation Fully Supporting Slatersville Reservoir RI0001002L-09 218.87 Acres CLASS B Slatersville Reservoir. Burrillville, North Smithfield TMDL TMDL Use Description Use Attainment Status Cause/Impairment Schedule Approval Comment Fish and Wildlife habitat Not Supporting COPPER 2026 None Not Supporting LEAD 2026 None Not Supporting NON-NATIVE AQUATIC PLANTS None No TMDL required. -

RI DEM/Water Resources
STATE OF RHODE ISLAND AND PROVIDENCE PLANTATIONS DEPARTMENT OF ENVIRONMENTAL MANAGEMENT Water Resources WATER QUALITY REGULATIONS July 2006 AUTHORITY: These regulations are adopted in accordance with Chapter 42-35 pursuant to Chapters 46-12 and 42-17.1 of the Rhode Island General Laws of 1956, as amended STATE OF RHODE ISLAND AND PROVIDENCE PLANTATIONS DEPARTMENT OF ENVIRONMENTAL MANAGEMENT Water Resources WATER QUALITY REGULATIONS TABLE OF CONTENTS RULE 1. PURPOSE............................................................................................................ 1 RULE 2. LEGAL AUTHORITY ........................................................................................ 1 RULE 3. SUPERSEDED RULES ...................................................................................... 1 RULE 4. LIBERAL APPLICATION ................................................................................. 1 RULE 5. SEVERABILITY................................................................................................. 1 RULE 6. APPLICATION OF THESE REGULATIONS .................................................. 2 RULE 7. DEFINITIONS....................................................................................................... 2 RULE 8. SURFACE WATER QUALITY STANDARDS............................................... 10 RULE 9. EFFECT OF ACTIVITIES ON WATER QUALITY STANDARDS .............. 23 RULE 10. PROCEDURE FOR DETERMINING ADDITIONAL REQUIREMENTS FOR EFFLUENT LIMITATIONS, TREATMENT AND PRETREATMENT........... 24 RULE 11. PROHIBITED -
Dam Safety Program
STATE OF RHODE ISLAND 2009 Annual Report to the Governor on the Activities of the DAM SAFETY PROGRAM Overtopping earthen embankment of Creamer Dam (No. 742), Tiverton Department of Environmental Management Prepared by the Office of Compliance and Inspection TABLE OF CONTENTS HISTORY OF RHODE ISLAND’S DAM SAFETY PROGRAM....................................................................3 STATUTES................................................................................................................................................3 GOVERNOR’S TASK FORCE ON DAM SAFETY AND MAINTENANCE .................................................3 DAM SAFETY REGULATIONS .................................................................................................................4 DAM CLASSIFICATIONS..........................................................................................................................5 INSPECTION PROGRAM ............................................................................................................................7 ACTIVITIES IN 2009.....................................................................................................................................8 UNSAFE DAMS.........................................................................................................................................8 INSPECTIONS ........................................................................................................................................10 High Hazard Dam Inspections .............................................................................................................10 -

Strategic Plan for the Restoration of Anadromous Fishes to Rhode
STRATEGIC PLAN FOR THE RESTORATION OF ANADROMOUS FISHES TO RHODE ISLAND COASTAL STREAMS American Shad, Alosa sapidissima D. Raver, USFWS Prepared By: Dennis E. Erkan, Principal Marine Biologist Rhode Island Department of Environmental Management Division of Fish and Wildlife Completion Report In Fulfillment of Federal Aid In Sportfish Restoration Project F-55-R December 2002 Special thanks to Luther Blount for initiating this project. Rhode Island Anadromous Restoration Plan CONTENTS Introduction........................................................................................................................Page 6 Methods..............................................................................................................................Page 7 I. Plan Objective...............................................................................................................Page 11 II. Expected Results or Benefits ......................................................................................Page 11 III. Strategic Plan.............................................................................................................Page 12 IV. References.................................................................................................................Page 15 V. Additional Sources of Information...............................................................................Page 16 APPENDICES Appendix A. Recommended Watershed Enhancements.....................................................Page 20 Appendix B. Description -

FFY 2013-2016 State Transportation Improvement Program
State of Rhode Island Transportation Improvement Program Adopted July 12, 2012 FY 2013—2016 Amended December 14, 2015 FY 2013 - 2016 TIP Amendments TIP Amendment Requesting Agency Amendment Classification Date Amendment #1 Town of Westerly Minor Amendment February 28, 2013 Amendment #2 Rhode Island Department of Transportation Administrative Adjustment November 25, 2013 Amendment #3 Rhode Island Transit Authority Administrative Adjustment April 14, 2014 Amendment #4 Rhode Island Department of Transportation Administrative Adjustment August 5, 2014 Amendment #5 Rhode Island Transit Authority Major Amendment March 13, 2015 Amendment #6 Rhode Island Department of Transportation Minor Amendment December 14, 2015 July 2012 RHODE ISLAND STATEWIDE PLANNING PROGRAM The Rhode Island Statewide Planning Program is established by Chapter 42-11-10 of the General Laws as the central planning agency for state government. The work of the Program is guided by the State Planning Council, comprised of state, local, and public representatives and federal advisors. The Council also serves as the single statewide Metropolitan Planning Organization (MPO) for Rhode Island. The staff component of the Program resides within the Department of Administration. The objectives of the Program are to plan for the physical, economic, and social development of the state; to coordinate the activities of government agencies and private individuals and groups within this framework of plans and programs; and to provide planning assistance to the Governor, the General Assembly, and the agencies of state government. The Program prepares and maintains the State Guide Plan as the principal means of accomplishing these objectives. The State Guide Plan is comprised of a series of functional elements that deal with physical development, environmental concerns, the economy, and human services. -
Map Layout of Town Index
NOTE TO USERS MAP REPOSITORIES (Maps available for reference only, not for FEMA maintains information about map features, distribution.) such as street locations and names, in or near COVENTRY, TOWN OF: designated flood hazard areas. Requests to revise Dept. Of Planning & Development & Zoning Dept. information in or near designated flood hazard 1675 Flat River Road areas may be provided to FEMA during the Coventry, Rhode Island 02816 community review period, at the final Consultation EAST GREENWICH, TOWN OF: Coordination Officer's meeting, or during the Dept. Of Public Works / Building Dept. statutory 90-day appeal period. Approved requests 111 Pierce Street East Greenwich, Rhode Island 02818 for changes will be shown on the final printed FIRM. WARWICK, CITY OF: Planning Department Warwick City Hall Annex Building, 3275 Post Road, 2nd Floor Warwick, Rhode Island 02886 BASE MAP SOURCE WEST GREENWICH, TOWN OF: Town Hall Base map information shown on this FIRM was provided 302 Victory Highway, Annex South in digital format by Rhode Island Geographic Information West Greenwich, Rhode Island 02817 System (RI GIS). This information was derived from digital natural color orthophotos produced at a scale of 1:5,000 WEST WARWICK, TOWN OF: and 2 foot pixel resolution. Orthoimages were collected Building & Zoning Office from 2003 through 2004. 1170 Main Street West Warwick, Rhode Island 02893 ELEVATION DATUM Flood elevations on this map are referenced to the North American Vertical Datum of 1988. These flood elevations must be compared to structure and ground elevations referenced to the same datum. For information regarding conversion between the National Geodetic Vertical Datum of 1929 and the North American Vertical Datum of 1988, contact the National Geodetic Survey at the following address: NGS Information Services NOAA, N/NGS12 National Geodetic Survey SSMC-3, #9202 1315 East-West Highway Silver Spring, MD 20910-3282 (301) 713-3242 - N O T E - D esignated CBRS Areas are located on p anels 132, 133, 134, 141, 142, 143, 1 44*, 151, 153, and 155*. -
Contract Specific
GENERAL PROVISIONS – CONTRACT SPECIFIC GENERAL PROVISIONS – CONTRACT SPECIFIC PARAGRAPH TITLE PAGE 1 Brief Scope of Work CS – 1 2 List of Contract Drawings CS – 2 3 Utility and Municipal Notification and Coordination CS – 2 4 Specialty Items CS – 4 5 Transportation Management Plan CS – 4 6 Sequence of Construction CS – 4 7 Special Requirements for Pavement Markings CS – 5 8 Utility Structures and Waterways within Roadway CS – 6 9 Contractor’s Responsibility for Damaged Storm Drains CS – 6 10 Special Requirement for Traffic Protection CS – 6 11 Storage of Construction Material and/or Equipment CS – 7 12 Blasting Restrictions CS – 7 13 Survey Layout Notes CS – 7 14 Traffic Fines in Work Zones CS – 8 15 Right-of-Way and Damage to Property CS – 8 16 Coordination with Other Projects CS – 8 17 Incident Management CS – 8 18 Guardrail Replacement CS – 8 19 Police Compensation CS – 9 20 Environmental Permits CS – 9 21 Stormwater Pollution Prevention Plan CS – 9 22 Shop Drawing and Submittals CS – 10 23 Available Documents CS – 10 Appendix A Locus Maps Appendix B Environmental Permits Appendix C Small Site Stormwater Pollution Prevention Plan Appendix D Transportation Management Plan Appendix E NPS Preservation Brief No. 38 NPS Preservation Brief No. 47 CS-i 1. BRIEF SCOPE OF WORK: Bridge Group 18B – East Greenwich and North Kingstown, Rhode Island Contract No. 2019-CB-061, Federal-Aid Project No. BHO-018B (001), is for repairs to 11 bridges in the Town of East Greenwich in Kent County, and the Town of North Kingstown in Washington County, Rhode Island. The work in this Contract includes, but is not limited to, steel painting, steel repairs, masonry repairs, concrete repairs (superstructure and substructure), concrete sealing, joint repairs and sealing, pavement removal and replacement, waterproofing membrane installation, bridge washing, vegetation clearing, tree removal, riprap installation, and steel guardrail repair and replacement. -
RICR Template
250-RICR-60-00-10 TITLE 250 ± DEPARTMENT OF ENVIRONMENTAL MANAGEMENT CHAPTER 60 ± FISH AND WILDLIFE SUBCHAPTER 00 ± N/A PART 10 ± Fishing Regulations for the Season 10.1 Purpose The purpose of these Rules and Regulations is to regulate freshwater fishing seasons and bag limits annually. 10.2 Authority These Rules and Regulations are promulgated pursuant to R.I. Gen. Laws §§ 20- 1-12 and 20-1-13, as well as R.I. Gen. Laws Chapters 42-17.1 and 42-17.6, in accordance with R.I. Gen. Laws Chapter 42-35, Administrative Procedures Act. 10.3 Application The terms and provisions of these Rules and Regulations shall be liberally construed to permit the Department to effectuate the purpose of State laws, goals, and policies. 10.4 Severability If any provision of these Rules and Regulations, or the application, thereof, to any person or circumstances, is held invalid by a court of competent jurisdiction, the validity of the remainder of the Rules and Regulations shall not be affected thereby. 10.5 Superseded Rules and Regulations On the effective date of these Rules and Regulations, all previous Rules and Regulations, and any policies regarding the administration and enforcement of freshwater and diadromous fisheries shall be superseded. However, any enforcement action taken by, or application submitted to the Department prior to the effective date of these Rules and Regulations shall be governed by the Rules and Regulations in effect at the time the enforcement action was taken, or application filed. 10.6 Regulations 10.6.1 Freshwater Fisheries Regulations A. -

Part II: Natural and Cultural Resources
PART II NATURAL AND CULTURAL RESOURCES “Access to the water is the number one attraction for my family.... I love Pawtuxet Village, City Park, and Conimicut Point Park. These are areas I often visit [...] and feel like I’m on a mini vacation.”—WARWICK RESIDENT Nature and Parks An integrated “Green Systems Plan” that encompasses natural resources, open space, greenways, waterfronts, parks and recreation, and sustainability. > GREEN SYSTEMS: • “Green corridors” to connect open space and recreation land with walking and biking routes. • A goal of a park within walking distance of every resident. • Parks and open space maintenance guidelines, new funding options, and improved facilities and maintenance. • Policies and programs that protect, enhance and increase the city’s tree canopy. > BLUE SYSTEMS: • Natural resource areas and water bodies—including our 39 miles of coastline and five coves—protected by appropriate zoning and land use management. • Better water quality and habitat in freshwater and saltwater resources—Buckeye Brook, Warwick Pond, Greenwich Bay. • Protected coastal and fresh-water public access points. • A recreational “blueway” trail system on local waters. History and Culture • Incentives for historic preservation. • Enhanced review process in historic districts with more focused design guidelines. • A demolition-delay ordinance to promote reuse of historic buildings. • Promotion of arts and cultural activities and initiatives in City Centre Warwick and elsewhere as part of the city’s economic development strategy. 4 Natural Resources FROM A WARWICK RESIDENT “There is a whole community of people committed to improving the quality and treatment of our natural resources, the bay, the watersheds, [and] open lands.” 4.1 CITY OF WARWICK COMPREHENSIVE PLAN 2013–2033 PART II | CHAPTER 4 NATURAL RESOURCES A GOALS AND POLICIES GOALS POLICIES FOR DECISION MAKERS Warwick’s natural resource sys- • Support integrated strategies to protect and restore natural systems tems, sensitive water resources with desirable land use practices and management programs. -

RI DEM/Water Resources- Water Quality Regulations with Appendices
WATERBODY ID CLASSIFICATION NUMBER WATERBODY DESCRIPTION AND PARTIAL USE Blackstone River Basin RI0001 (continued) Branch River & Tributaries Subbasin RI0001002 (continued) RI0001002R-01B Branch River from the outlet of the Slatersville Reservoir to B the confluence with the Blackstone River. North Smithfield RI0001002R-23 Dawley Brook. North Smithfield B Blackstone River & Tributaries Subbasin RI0001003 RI0001003R-01A Blackstone River from the MA-RI border to the CSO outfall B1 located at River and Samoset Streets in Central Falls. Woonsocket, North Smithfield, Cumberland, Lincoln and Central Falls. RI0001003R-02 Cherry Brook. North Smithfield, Woonsocket B RI0001003L-03 Todd's Pond. North Smithfield A RI0001003L-05 Social Pond. Woonsocket B RI0001003R-03 Mill River. Woonsocket B RI0001003R-04 Peters River. Woonsocket B RI0001003L-04 Handy Pond (Upper Rochambeau Pond). Lincoln B RI0001003R-06 West Sneech Brook. Cumberland B RI0001003R-05 Scott Brook. Cumberland A RI0001003R-07 Monastery Brook. Cumberland B RI0001003R-01B Blackstone River from the CSO outfall located at River and B1{a} Samoset streets in Central Falls to the Slater Mill Dam. Central Falls, Pawtucket. RI0001003L-01 Scott Pond. Lincoln B RI0001003L-02 Valley Falls Pond. Cumberland B1 Woonsocket Reservoir #3 & all Tributaries Subbasin RI0001004 RI0001004L-01@ Woonsocket Reservoir #3. North Smithfield, Smithfield AA RI0001004L-02@ Woonsocket Reservoir #1. North Smithfield AA RI0001004L-03 Woonsocket Reservoir #2. North Smithfield AA RI0001004L-04 Laporte's Pond. Lincoln A RI0001004R-01 Crookfall Brook. North Smithfield AA RI0001004R-02 Spring Brook. North Smithfield AA Appendix A July 2006 A-9 WATERBODY ID CLASSIFICATION NUMBER WATERBODY DESCRIPTION AND PARTIAL USE Blackstone River Basin RI0001 (continued) Sneech Pond & Tributaries Subbasin RI0001005 RI0001005L-01@ Sneech Pond. -

RI 2008 Integrated Report
STATE OF RHODE ISLAND AND PROVIDENCE PLANTATIONS 2008 INTEGRATED WATER QUALITY MONITORING AND ASSESSMENT REPORT SECTION 305(b) STATE OF THE STATE’S WATERS REPORT And SECTION 303(d) LIST OF IMPAIRED WATERS FINAL APRIL 1, 2008 RHODE ISLAND DEPARTMENT OF ENVIRONMENTAL MANAGEMENT OFFICE OF WATER RESOURCES www.dem.ri.gov STATE OF RHODE ISLAND AND PROVIDENCE PLANTATIONS 2008 INTEGRATED WATER QUALITY MONITORING AND ASSESSMENT REPORT Section 305(b) State of the State’s Waters Report And Section 303(d) List of Impaired Waters FINAL April 1, 2008 DEPARTMENT OF ENVIRONMENTAL MANAGEMENT OFFICE OF WATER RESOURCES 235 Promenade Street Providence, RI 02908 (401) 222-4700 www.dem.ri.gov Table of Contents List of Tables .............................................................................................................................................iii List of Figures............................................................................................................................................iii Executive Summary.................................................................................................................................... 1 Chapter 1 Integrated Report Overview.................................................................................................... 7 A. Introduction ................................................................................................................................... 7 B. Background .................................................................................................................................. -

Permit Restriction List
Rhode Island Department of Transportation ANNUAL NON-DIVISIBLE LOAD (BLANKET) PERMIT RESTRICTION LIST 5 AXLE CONSTRUCTION EQUIPMENT-CRANES ONLY The following restrictions apply to the construction equipment vehicles described in RI General Law (RIGL) 31-25-21. For any construction equipment vehicle with the total number of axles listed here, the following bridges are restricted from crossing due to vehicle weight. The bridge tonnage values below are the maximum tonnage permitted. These restrictions are continuously updated and must be printed and kept in the vehicle associated with the permit as part of the annual permit issued by RIDOT. In case of conflict, posted weight limits at a bridge shall govern over these restrictions.. Carries Crosses City/Town Bridge # Max. Tonnage COLT DRIVE MILL GUT TIDAL INLET Bristol 072401 27 RI 114 MT HP BY,N SEC RR,114 LP Bristol 030001 56 RI 114 Hope St Tidal Inlet Bristol 015301 45 GAZZA RD CHEPACHET RIVER Burrillville 035301 48 RI 102 BRONCO HWY BRANCH RVR & JOSLIN RD Burrillville 067201 26 RI 102 BRONCO HWY BRANCH RIVER Burrillville 067301 40 RI 107 MAIN ST CHEPACHET RIVER Burrillville 033701 48 RI 7 Douglas Pike Branch River Burrillville 010601 50 VICTORY HWY PASCOAG RIVER Burrillville 010501 59 VICTORY HWY BRANCH RIVER Burrillville 011201 36 WARNER LANE CLEAR RIVER Burrillville 035501 55 CROSS ST AMTRAK Central Falls 091901 50 RI 114 BROAD ST BLACKSTONE RIVER Central Falls 030501 39 SACRED HEART AV AMTRAK & RAILROAD ST Central Falls 091701 45 RI 112 CRLNA BK RD AMTRAK Charlestown 005701 51 BARBS