Fieldbus Access Revision 1.5 Getting Started Date: 2017-01-09
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
16-Channel DAS with 16-Bit, Bipolar Input, Dual Simultaneous Sampling
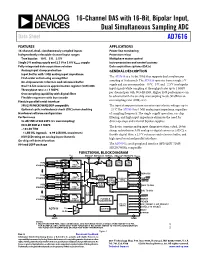
16-Channel DAS with 16-Bit, Bipolar Input, Dual Simultaneous Sampling ADC Data Sheet AD7616 FEATURES APPLICATIONS 16-channel, dual, simultaneously sampled inputs Power line monitoring Independently selectable channel input ranges Protective relays True bipolar: ±10 V, ±5 V, ±2.5 V Multiphase motor control Single 5 V analog supply and 2.3 V to 3.6 V VDRIVE supply Instrumentation and control systems Fully integrated data acquisition solution Data acquisition systems (DASs) Analog input clamp protection GENERAL DESCRIPTION Input buffer with 1 MΩ analog input impedance First-order antialiasing analog filter The AD7616 is a 16-bit, DAS that supports dual simultaneous On-chip accurate reference and reference buffer sampling of 16 channels. The AD7616 operates from a single 5 V Dual 16-bit successive approximation register (SAR) ADC supply and can accommodate ±10 V, ±5 V, and ±2.5 V true bipolar Throughput rate: 2 × 1 MSPS input signals while sampling at throughput rates up to 1 MSPS Oversampling capability with digital filter per channel pair with 90.5 dB SNR. Higher SNR performance can Flexible sequencer with burst mode be achieved with the on-chip oversampling mode (92 dB for an Flexible parallel/serial interface oversampling ratio (OSR) of 2). SPI/QSPI/MICROWIRE/DSP compatible The input clamp protection circuitry can tolerate voltages up to Optional cyclic redundancy check (CRC) error checking ±21 V. T h e AD7616 has 1 MΩ analog input impedance, regardless Hardware/software configuration of sampling frequency. The single-supply operation, on-chip Performance filtering, and high input impedance eliminate the need for 92 dB SNR at 500 kSPS (2× oversampling) driver op amps and external bipolar supplies. -
The CLASP Application Security Process
The CLASP Application Security Process Secure Software, Inc. Copyright (c) 2005, Secure Software, Inc. The CLASP Application Security Process The CLASP Application Security Process TABLE OF CONTENTS CHAPTER 1 Introduction 1 CLASP Status 4 An Activity-Centric Approach 4 The CLASP Implementation Guide 5 The Root-Cause Database 6 Supporting Material 7 CHAPTER 2 Implementation Guide 9 The CLASP Activities 11 Institute security awareness program 11 Monitor security metrics 12 Specify operational environment 13 Identify global security policy 14 Identify resources and trust boundaries 15 Identify user roles and resource capabilities 16 Document security-relevant requirements 17 Detail misuse cases 18 Identify attack surface 19 Apply security principles to design 20 Research and assess security posture of technology solutions 21 Annotate class designs with security properties 22 Specify database security configuration 23 Perform security analysis of system requirements and design (threat modeling) 24 Integrate security analysis into source management process 25 Implement interface contracts 26 Implement and elaborate resource policies and security technologies 27 Address reported security issues 28 Perform source-level security review 29 Identify, implement and perform security tests 30 The CLASP Application Security Process i Verify security attributes of resources 31 Perform code signing 32 Build operational security guide 33 Manage security issue disclosure process 34 Developing a Process Engineering Plan 35 Business objectives 35 Process -

IS 13737 (1993): Isoinformation Technology
इंटरनेट मानक Disclosure to Promote the Right To Information Whereas the Parliament of India has set out to provide a practical regime of right to information for citizens to secure access to information under the control of public authorities, in order to promote transparency and accountability in the working of every public authority, and whereas the attached publication of the Bureau of Indian Standards is of particular interest to the public, particularly disadvantaged communities and those engaged in the pursuit of education and knowledge, the attached public safety standard is made available to promote the timely dissemination of this information in an accurate manner to the public. “जान का अधकार, जी का अधकार” “परा को छोड न 5 तरफ” Mazdoor Kisan Shakti Sangathan Jawaharlal Nehru “The Right to Information, The Right to Live” “Step Out From the Old to the New” IS 13737 (1993): ISOInformation Technology - 130 mm Rewritable optical disk cartridges for information interchange [LITD 16: Computer Hardware, Peripherals and Identification Cards] “ान $ एक न भारत का नमण” Satyanarayan Gangaram Pitroda “Invent a New India Using Knowledge” “ान एक ऐसा खजाना > जो कभी चराया नह जा सकताह ै”ै Bhartṛhari—Nītiśatakam “Knowledge is such a treasure which cannot be stolen” IS 13737 : 1993 ISO/IEC 10089 : 1991 CONTENTS Page NationalForeword..........,..........................................‘.““““’ . (vii) 1 Scope 1 2 Conformance 1 3 Normative references 1 4 Conventions and notations 1 5 List of acronyms 2 6 Definitions 2 2 6. I case 2 6.2 Clamping Zone 6.3 -

1. Background This Paper Is About a Method for Recovering Data from Floppy Disks That Are Failing Due to “Weak Bits”
A Method for Recovering Data From Failing Floppy Disks with a Practical Example Dr. Frederick B. Cohen, Ph.D. and Charles M. Preston Fred Cohen & Associates and California Sciences Institute Abstract: As floppy disks and other similar media age, they have a tendency to lose data because of the reduction in retention of electromagnetic fields over time associated with various environmental degradation factors. In attempting to read these disks, the coding techniques used to write them can be exploited along with the proposed fault mechanisms to demonstrate that repetitions of read attempts under proper conditions yield valid data subject to specific error modes. In many cases those errors can be partially or completely reversed by analysis of read results. A practical example involving a case of substantial legal value is used as an example of the application of these methods. Keywords: weak bits, floppy disks, digital forensics, coding, field density loss, the birthday problem, error inversion 1. Background This paper is about a method for recovering data from floppy disks that are failing due to “weak bits”. It describes a repetitive read technique that has successfully recovered data from failing floppy disks in forensic cases and describes analysis of the results of such repetitive reads in terms of yielding forensically sound data values. These techniques are not new or particularly unique; however, they are not widely published and analysis necessary to support their use in legal matters has not been found elsewhere. The particular matter used as an example in this analysis involved a floppy disk that was more than 15 years old and that contained the only copy of a binary assembled version of a software program that was subject to intellectual property claims of sufficient value to warrant recovery beyond the means normally used by commercial recovery firms. -
Floppy Disc Controller Instruction Manual
Part Number 2120-0067 OQ419 FLOPPY DISC CONTROLLER INSTRUCTION MANUAL March 1985 DISTRIBUTED LOGIC CORPORATION 1555 S. Sinclair Street P.O. Box 6270 ~R Anaheim, California 92806 I nmmI Telephone: (714) 937·5700 Telex: 6836051 Contents SECTION 1 - GENERAL INFORMATION 1.1 INTRODUCTION 1 1.2 GENERAL DESCRIPTION 2 1.3 COMPATIBILITY 2 1.4 LOGICAL TRACK FORMAT 3 1.4.1 Sector Header Field 3 1.4.2 Data Field 5 1.4.3 CRC - Cyclic Redundancy Check 5 1.5 RECORDING SCHEME 6 1.6 SPECIFICATIONS 6 SECTION 2 - INSTALLATION 2.1 CONTROLLER JUMPER CONFIGURATIONS 7 2.1.1 Device and Vector Address Selection 8 2.1.2 Device Interrupt Priority 9 2.1.3 Bootstrap 10 2.1.4 Wri te Precompensati on 10 2.1.5 Write Current Control 11 2.1.6 Drive Step Rate 11 2.2 DRIVE CONFIGURATIONS 11 2.3 CABLING 19 2.4 CONTROLLER INSTALLATION 21 2.5 INITIAL CHECKOUT 21 SECTION 3 - OPERATION 3.1 GENERAL INFORHATION 23 3.2 BOOTSTRAPPING 23 3.3 FORMATTING 24 3.4 FILL/WRITE OPERATION 25 3.5 READ/EMPTY OPERATION 27 3.6 OPERATION USING RT-ll 27 SECTION 4 - PROGRAMMING 4.1 GENERAL INFORMATION 29 4.2 COMMAND AND STATUS REGISTER - RXVCS (177170) 30 4.3 DATA BUFFER (177172) 31 4.3.1 Data Buffer Register (RXVDB) 32 4.3.2 Trace Address Register (RXVTA) 32 4.3.3 Sector Address Register (RXVSA) 32 4.3.4 Word Count Register (RXVWC) 32 4.3.5 Bus Address Register (RXVBA) 33 4.3.6 Error and Status Register (RXVES) 33 4.3.7 Bus Address Extension Register (RXVBAE) 35 i i ; 4.4 EXTENDED STATUS REGISTERS 35 4.5 COMMAND PROTOCOL 36 4.5.1 Fill Buffer (000) 36 4.5.2 Empty Buffer (001) 37 4.5.3 Write Buffer -

High Performance Table-Based Algorithm for Pipelined CRC Calculation
High Performance Table-Based Algorithm for Pipelined CRC Calculation Yan Sun and Min Sik Kim School of Electrical Engineering and Computer Science Washington State University Pullman, Washington 99164-2752, U.S.A. Email: fysun,[email protected] Abstract—In this paper, we present a fast cyclic redun- for message length detection of variable-length message dancy check (CRC) algorithm that performs CRC compu- communications [4], [5]. tation for an arbitrary length of message in parallel. For a Communication networks use protocols with ever in- given message with any length, the algorithm first chunks the message into blocks, each of which has a fixed size equal creasing demands on speed. The increasing performance to the degree of the generator polynomial. Then it computes needs can be fulfilled by using ASICs (Application Spe- CRC for the chunked blocks in parallel using lookup tables, cific Integrated Circuits) and this will probably also be and the results are combined together with XOR operations. the case in the future. Meeting the speed requirement In the traditional implementation, it is the feedback that is crucial because packets will be dropped if processing makes pipelining problematic. In the proposed algorithm, we solve this problem by taking advantage of CRC’s properties is not completed at wire speed. Recently, protocols for and pipelining the feedback loop. The short pipeline latency high throughput have emerged, such as IEEE 802.11n of our algorithm enables a faster clock frequency than WLAN and UWB (Ultra Wide Band), and new protocols previous approaches, and it also allows easy scaling of the with even higher throughput requirement are on the way. -

A Method for Recovering Data from Failing Floppy Disk Drives
A Method for Recovering Data From Failing Floppy Disk Drives Dr. Frederick B. Cohen, Ph.D. and Charles Preston Background: This paper is about a method for recovering data from floppy disks that are failing due to weak bits. It describes a repetitive read technique that has successfully recovered data from failing floppies in forensic cases and describes other related techniques. None of these techniques are new or particularly unique, however, they are not widely published to the best of the authors knowledge and some of the related analysis may be helpful in making more definitive determinations in some cases. The nature of 'weak' bits and failure modes: Floppy disks tend to degrade in various ways over time and under various environmental conditions such as temperature, humidity, and so forth. In some cases this results in the presence of so-called “weak” bits on the media. Weak bits are bits that are sufficiently degraded in their electromagnetic field so as to yield voltages between the values for a '1' and a '0' when read by the read heads on most floppy disks. This is a result of reduced flux density in the electromagnetic media. In particular, the floppy disk coding used in most current disks is identified in: http://cma.zdnet.com/book/upgraderepair/ch14/ch14.htm as Modified Frequency Modulation (MFM) which uses timed flux density transitions to indicate bits. In particular, it uses a “No transition, Transition” (NT) sequence to indicate a “1”, a TN to indicate a '0' preceded by a '0', and an NN to indicate a '0' preceded by a '1'. -

Acronyms Appendix
APPENDIX A Acronyms Table A-1 defines the acronyms that are used in this publication. Ta b l e A- 1 L i s t o f Ac ro ny m s Acronym Expansion AAL ATM adaptation layer ACE access control entry ACL access control list ACNS Application and Content Networking System AFI authority and format identifier Agport aggregation port ALPS Airline Protocol Support AMP Active Monitor Present APaRT Automated Packet Recognition and Translation ARP Address Resolution Protocol ATA Analog Telephone Adaptor ATM Asynchronous Transfer Mode AV attribute value BDD binary decision diagrams BECN backward explicit congestion notification BGP Border Gateway Protocol Bidir bidirectional PIM BPDU bridge protocol data unit BRF bridge relay function BSC Bisync BSTUN Block Serial Tunnel BUS broadcast and unknown server BVI bridge-group virtual interface CAM content-addressable memory CAR committed access rate Catalyst 6500 Series Switch Content Switching Module with SSL Command Reference OL-6237-01 A-1 Appendix A Acronyms Table A-1 List of Acronyms (continued) Acronym Expansion CBAC context based access control CCA circuit card assembly CDP Cisco Discovery Protocol CEF Cisco Express Forwarding CHAP Challenge Handshake Authentication Protocol CIR committed information rate CIST Common and Internal Spanning Tree CLI command-line interface CLNS Connection-Less Network Service CMNS Connection-Mode Network Service CNS Cisco Networking Services COPS Common Open Policy Server COPS-DS Common Open Policy Server Differentiated Services CoS class of service CPLD Complex Programmable -

Programming Embedded Systems, Second Edition with C and GNU Development Tools
Programming Embedded Systems Second Edition Programming Embedded Systems, Second Edition with C and GNU Development Tools Foreword If you mention the word embedded to most people, they'll assume you're talking about reporters in a war zone. Few dictionaries—including the canonical Oxford English Dictionary—link embedded to computer systems. Yet embedded systems underlie nearly all of the electronic devices used today, from cell phones to garage door openers to medical instruments. By now, it's nearly impossible to build anything electronic without adding at least a small microprocessor and associated software. Vendors produce some nine billion microprocessors every year. Perhaps 100 or 150 million of those go into PCs. That's only about one percent of the units shipped. The other 99 percent go into embedded systems; clearly, this stealth business represents the very fabric of our highly technological society. And use of these technologies will only increase. Solutions to looming environmental problems will surely rest on the smarter use of resources enabled by embedded systems. One only has to look at the network of 32-bit processors in Toyota's hybrid Prius to get a glimpse of the future. Page 1 Programming Embedded Systems Second Edition Though prognostications are difficult, it is absolutely clear that consumers will continue to demand ever- brainier products requiring more microprocessors and huge increases in the corresponding software. Estimates suggest that the firmware content of most products doubles every 10 to 24 months. While the demand for more code is increasing, our productivity rates creep up only slowly. So it's also clear that the industry will need more embedded systems people in order to meet the demand. -

High Rate Ultra Wideband PHY and MAC Standard ECMA-368
ECMA-368 1st Edition / December 2005 High Rate Ultra Wideband PHY and MAC Standard Standard ECMA-368 1st Edition - December 2005 High Rate Ultra Wideband PHY and MAC Standard Ecma International Rue du Rhône 114 CH-1204 Geneva T/F: +41 22 849 6000/01 www.ecma-international.org Introduction This Ecma Standard specifies the ultra wideband (UWB) physical layer (PHY) and medium access control (MAC) sublayer for a high-speed short range wireless network, utilizing all or part of the spectrum between 3 100 − 10 600 MHz supporting data rates of up to 480 Mb/s. This standard divides the spectrum into 14 bands, each with a bandwidth of 528 MHz. The first 12 bands are then grouped into 4 band groups consisting of 3 bands, and the last two bands are grouped into a fifth band group. A MultiBand Orthogonal Frequency Division Modulation (MB-OFDM) scheme is used to transmit information. A total of 110 sub-carriers (100 data carriers and 10 guard carriers) are used per band. In addition, 12 pilot subcarriers allow for coherent detection. Frequency-domain spreading, time-domain spreading, and forward error correction (FEC) coding are provided for optimum performance under a variety of channel conditions. The MAC sublayer is designed to enable mobility, such that a group of devices may continue communicating while merging or splitting from other groups of devices. To maximize flexibility, the functionality of this MAC is distributed among devices. These functions include distributed coordination to avoid interference between different groups of devices by appropriate use of channels and distributed medium reservations to ensure Quality of Service. -

The Floppy User Guide
The floppy user guide Michael Haardt ([email protected]) Alain Knaff ([email protected]) David C. Niemi ([email protected]) ABSTRACT This document1 is intended for people interested in details about floppy drives, e.g. the in- terface bus, data recording, logical structure of data on the floppy and more. The connec- tion to Linux is made where applicable to show how floppies from other computers can be accessed or how and why it is possible to put more data on a floppy. Since they use the same interface, there is also a small section about floppy tape streamers. September 20th, 1996 1. Floppy drive sizes Inside the case is the floppy disk, a round plastic foil coated with a material containing metal oxide, which can be magnetised to store information. The case has multiple openings. The bigger hole in the middle allows the drive motor to spin the floppy clockwise. Old floppy drives use a DC-motor with a variable resistor to adjust the speed. They often have a stroboscope ring on their bottom for that purpose. Modern drives hav ebrushless motors. The big disk on the bottom contains permanent magnets and is controlled by an SIL-IC with a heat pipe and connections to coils under the disk. This unit is controlled with a crystal or ceramics resonator [?]. If you want to change the drive speed, adjusting the variable resistor works for older drives, but not for newer ones. On those, you will need to change the crystal. The speed may off by at most 2%. -

H3C Network Technology Acronyms
H3C network technology acronyms # A B C D E F G H I K L M N O P Q R S T U V W X Z 10GE Ten-GigabitEthernet 1DM One-way Delay Measurement 3DES Triple Data Encryption Standard 6PE IPv6 Provider Edge A Return AAA Authentication, Authorization and Accounting AAL ATM Adaptation Layer AAL5 ATM Adaptation Layer 5 ABR Area Border Router AC Attachment Circuit AC Access Controller AC Access Category AC Name Access Controller Name ACA Acquire Change Authorization ACCM Async-Control-Character-Map ACFC Address-and-Control-Field-Compression ACFP Application Control Forwarding Protocol Ack Acknowledgment ACL Access Control List ACR Adaptive Clock Recovery ACS Auto-Configuration Server ACS AS Control Server ACSEI ACFP Client and Server Exchange Information AD Active Directory ADM ATM Direct Mapping ADPCM Adaptive Differential Pulse Code Modulation ADSL Asymmetric Digital Subscriber Line ADVPN Auto Discovery Virtual Private Network AER AS Edge Router AES Advanced Encryption Standard AF Assured Forwarding AFI Address Family Identifier 1 AFI Authority and Format Identifier AFT Address Family Translation AFTR Address Family Transition Router AH Authentication Header AIFSN Arbitration Inter Frame Spacing Number AIS Alarm Indication Signal AIW APPN Implementers Workshop AKM Authentication and Key Management ALG Application Level Gateway AM Analog Modem AMB Active Main Board AMI Alternate Mark Inversion A-MPDU Aggregate MAC Protocol Data Unit A-MSDU Aggregate MAC Service Data Unit ANCP Access Node Control Protocol ANI Adaptive Noise Immunity ANSI American National